Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Technical Sheet Racloflex NTДокумент2 страницыTechnical Sheet Racloflex NTAnthony AngОценок пока нет
- School Based Management Contextualized Self Assessment and Validation Tool Region 3Документ29 страницSchool Based Management Contextualized Self Assessment and Validation Tool Region 3Felisa AndamonОценок пока нет
- A Short Survey On Memory Based RLДокумент18 страницA Short Survey On Memory Based RLcnt dvsОценок пока нет
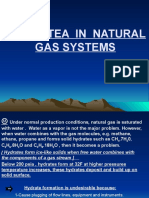
- Chapter 2 HydrateДокумент38 страницChapter 2 HydrateTaha Azab MouridОценок пока нет
- Superlab Manual PDFДокумент76 страницSuperlab Manual PDFGabriela Soares100% (1)
- Atomberg Gorilla FanДокумент12 страницAtomberg Gorilla FanjothamОценок пока нет
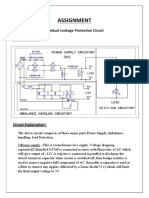
- Assignment: Residual Leakage Protection Circuit Circuit DiagramДокумент2 страницыAssignment: Residual Leakage Protection Circuit Circuit DiagramShivam ShrivastavaОценок пока нет
- Cap1 - Engineering in TimeДокумент12 страницCap1 - Engineering in TimeHair Lopez100% (1)
- CPD - SampleДокумент3 страницыCPD - SampleLe Anh DungОценок пока нет
- P3 Past Papers Model AnswersДокумент211 страницP3 Past Papers Model AnswersEyad UsamaОценок пока нет
- 12 Step Worksheet With QuestionsДокумент26 страниц12 Step Worksheet With QuestionsKristinDaigleОценок пока нет
- Modern Construction HandbookДокумент498 страницModern Construction HandbookRui Sousa100% (3)
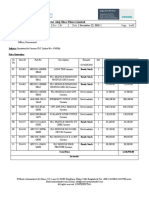
- LC For Akij Biax Films Limited: CO2012102 0 December 22, 2020Документ2 страницыLC For Akij Biax Films Limited: CO2012102 0 December 22, 2020Mahadi Hassan ShemulОценок пока нет
- Aditya Academy Syllabus-II 2020Документ7 страницAditya Academy Syllabus-II 2020Tarun MajumdarОценок пока нет
- Load Chart Crane LiftingДокумент25 страницLoad Chart Crane LiftingLauren'sclub EnglishBimbel Sd-sma100% (1)
- Types of Chemical Reactions: Synthesis and DecompositionДокумент3 страницыTypes of Chemical Reactions: Synthesis and DecompositionAlan MartínОценок пока нет
- Pearson R CorrelationДокумент2 страницыPearson R CorrelationAira VillarinОценок пока нет
- Ficha Técnica Panel Solar 590W LuxenДокумент2 страницыFicha Técnica Panel Solar 590W LuxenyolmarcfОценок пока нет
- Plan Lectie Clasa 5 D HaineДокумент5 страницPlan Lectie Clasa 5 D HaineCristina GrapinoiuОценок пока нет
- Concrete Pumping.: Squeeze PumpsДокумент2 страницыConcrete Pumping.: Squeeze PumpsALINDA BRIANОценок пока нет
- 28 TerminalsДокумент42 страницы28 TerminalsAlin FazacasОценок пока нет
- Digital Systems Project: IITB CPUДокумент7 страницDigital Systems Project: IITB CPUAnoushka DeyОценок пока нет
- 2013-01-28 203445 International Fault Codes Eges350 DTCДокумент8 страниц2013-01-28 203445 International Fault Codes Eges350 DTCVeterano del CaminoОценок пока нет
- CycleMax IntroДокумент13 страницCycleMax IntroIslam AtefОценок пока нет
- AP8 Q4 Ip9 V.02Документ7 страницAP8 Q4 Ip9 V.02nikka suitadoОценок пока нет
- WWW Ranker Com List Best-Isekai-Manga-Recommendations Ranker-AnimeДокумент8 страницWWW Ranker Com List Best-Isekai-Manga-Recommendations Ranker-AnimeDestiny EasonОценок пока нет
- End-Of-Chapter Answers Chapter 7 PDFДокумент12 страницEnd-Of-Chapter Answers Chapter 7 PDFSiphoОценок пока нет
- Blake Mouton Managerial GridДокумент3 страницыBlake Mouton Managerial GridRashwanth Tc100% (1)
- Importance of Porosity - Permeability Relationship in Sandstone Petrophysical PropertiesДокумент61 страницаImportance of Porosity - Permeability Relationship in Sandstone Petrophysical PropertiesjrtnОценок пока нет
- Principled Instructions Are All You Need For Questioning LLaMA-1/2, GPT-3.5/4Документ24 страницыPrincipled Instructions Are All You Need For Questioning LLaMA-1/2, GPT-3.5/4Jeremias GordonОценок пока нет