Академический Документы
Профессиональный Документы
Культура Документы
AP 20 Transformacoes Lineares
Загружено:
Alain Nascimento GuimarãesАвторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
AP 20 Transformacoes Lineares
Загружено:
Alain Nascimento GuimarãesАвторское право:
Доступные форматы
A AP P- -2 20 0 T Tr ra an ns sf fo or rm ma a e es s L Li in ne ea ar re es s
INSTITUTOMAU DE TECNOLOGIA
MAU
E EF FB B1 10 02 2 G Ge eo om me et tr ri ia a A An na al l t ti ic ca a e e l lg ge eb br ra a L Li in ne ea ar r
AP20 TRANSFORMAES LINEARES
fato conhecido que toda transformao linear
n m
T : descrita por uma matriz A
mxn denominada matriz cannica
1
da transformao T denota-se | | A T = .
Neste material, os principais objetivos consistem em examinar os aspectos de linearidade e
inversibilidade de transformaes lineares, bem como conectar os quatro subespaos fundamentais
de | | A T = ao estudo dessas transformaes.
1. Linearidade
Sejam
n m
T : e | | A T = sua respectiva matriz cannica (referenciada a quaisquer
bases fixadas no
n
e no
m
). Ento para
n
u,v e e , o | e , tem-se:
( ) ( ) ( ) T u v T u T v o | o | + = + (*).
De fato, ( ) ( ) ( ) ( ) ( ) ( ) T u v A u v A u A v Au Av T u T v o | o | o | o | o | + = + = + = + = + .
Uma consequncia direta da linearidade o fato de que toda transformao linear leva o
vetor nulo do
n
ao vetor nulo do
m
. Basta verificar que ( ) ( )
1 1 1
0 0 0
n m n n m
T A
= = .
A equao (*) pode ser desmembrada em trs testes. Assim,
n m
T : uma
transformao linear se, e somente se:
i) ( )
1 1
0 0
n m
T
= ;
ii) ( ) ( ) ( )
n
T u v T u T v , u,v + = + e ;
iii) ( ) ( )
n
T u T u , , u o o o = e e .
1
A matriz cannica A = [T] recebe esta denominao em virtude de que, estabelecidas as bases em que todos os
vetores m e n-dimensionais sejam referenciados, tal matriz a representao nica tal que T(x) = Ax.
Futuramente, o conceito de mudana de base ser estudado sob o ponto de vista das transformaes lineares e
as matrizes cannicas que representam uma mesma transformao em diversas bases sero construdas a
partir de um algoritmo relativamente simples.
A AP P- -2 20 0 T Tr ra an ns sf fo or rm ma a e es s L Li in ne ea ar re es s
INSTITUTOMAU DE TECNOLOGIA
MAU
E EF FB B1 10 02 2 G Ge eo om me et tr ri ia a A An na al l t ti ic ca a e e l lg ge eb br ra a L Li in ne ea ar r
2. Construo da matriz cannica de uma transformao linear
Neste material, as matrizes cannicas de todas as transformaes lineares abordadas estaro
referidas s bases cannicas dos espaos
n
e no
m
. Quando outras bases forem consideradas, a
tcnica aqui abordada sofre algumas alteraes (vide nota de rodap 1).
Teorema 1: Sejam
n m
T : , | | A T = sua respectiva matriz cannica e { }
1 2 n
C e ,e , ,e = a base
cannica do
n
. Nestas condies, tem-se
| | ( ) ( ) ( )
1 2 n
A T T e T e T e ( = =
.
Demonstrao: Seja
| |
1 2
T
n
n
x x x x = e . Com respeito base cannica C pode-se escrever
1 1 2 2 n n
x x e x e x e = + + + . Assim: ( ) ( ) ( ) ( ) ( )
1 1 2 2 1 1 2 2 n n n n
T x T x e x e x e T x e T x e T x e = + + + = + + + =
( ) ( ) ( ) ( ) ( ) ( )
1
2
1 1 2 2 1 2 1
1 1 1
1
n n n m n n
m m m
m n
n
n
x
x
x T e x T e x T e T e T e T e A x
x
(
(
(
(
= + + + = =
(
(
.
Portanto, | | ( ) ( ) ( )
1 2 n
A T T e T e T e ( = =
.
Exemplo 1: A matriz A de rotao (anti-horria) no
2
facilmente obtida com a utilizao do
Teorema 1.
y
( )
1
T e
( )
1
1 0 e , =
x
( )
2
0 1 e , =
u
u
cosu
senu
cosu
senu
( )
2
T e
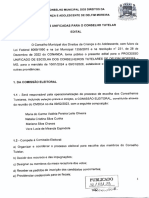
A figura ao lado mostra a aplicao da
rotao anti-horria de um ngulo u aos
vetores da base cannica do
2
: ( )
1
1 0 e , = e
( )
2
0 1 e , = . A inspeo da figura revela que:
( ) ( ) ( )
1
1 0 cos sen T e T , , u u = =
( ) ( ) ( )
2
0 1 sen cos T e T , , u u = =
Desta forma, a matriz cannica expressa por ( ) ( )
1 2
cos sen
sen cos
A T e T e
u u
u u
(
( = =
(
.
Exemplo 2: Seja a reta do plano Oxy que passa pela origem e forma um ngulo u ( 0 u t s < ) com o
eixo Ox positivo. Considere o operador linear T que leva cada vetor em sua projeo ortogonal sobre
a reta vide Figura (a). Deseja-se aplicar o Teorema 1 para a construo da matriz cannica do
operador linear T.
A AP P- -2 20 0 T Tr ra an ns sf fo or rm ma a e es s L Li in ne ea ar re es s
INSTITUTOMAU DE TECNOLOGIA
MAU
E EF FB B1 10 02 2 G Ge eo om me et tr ri ia a A An na al l t ti ic ca a e e l lg ge eb br ra a L Li in ne ea ar r
y
x
u
x
( ) T x
y
x
u
( )
1
T e
( )
1
1 0 e , =
1
cosu
y
x
u
( )
2
T e
( )
2
0 1 e , =
1
senu
u
Figura (a) Figura (b) Figura (c)
A anlise fornecida neste exemplo considera o caso em que 0 2 u t s s . Para a situao em
que 2 t u t < < o procedimento similar, sendo deixado como exerccio.
Sabe-se que ( ) ( )
1 2
A T e T e ( =
, em que
1
e e
2
e so os vetores da base cannica do
2
.
A Figura (b) revela que ( )
1
cos T e u = . Assim: ( )
( )
( )
2
1
1
1
cos
cos
sen cos
sen
T e
T e
T e
u
u
u u
u
(
(
( = =
(
(
.
A Figura (c) mostra que ( )
2
sen T e u = . Logo: ( )
( )
( )
2
2
2
2
cos
sen cos
sen
sen
T e
T e
T e
u
u u
u
u
(
(
( = =
(
(
.
Portanto, a matriz cannica do operador linear T | |
2
2
cos sen cos
sen cos sen
A T
u u u
u u u
(
= =
(
(
.
3. Composio de transformaes lineares
Sejam
n k
A
T : e
k m
B
T : duas transformaes lineares com matrizes cannicas
| |
A
T A = e | |
B
T B = . Para cada vetor
n
xe possvel calcular ( )
A
T x , um vetor do
k
. Depois se
pode determinar ( ) ( )
B A
T T x , um vetor do
m
. Assim, a aplicao de
A
T seguida de
B
T produz uma
nova transformao linear
n m
T : . Esta transformao chamada a composio ou a composta
de
B
T com
A
T e denotada por
B A
T T (l-se
B
T bola
A
T ). Logo:
( )( ) ( ) ( )
B A B A
T T x T T x = .
A composta
B A
T T linear, pois ( )( ) ( ) ( ) ( ) ( )
B A B A
T T x T T x B Ax BA x = = = de modo que
B A
T T a multiplicao por BA, que uma transformao linear.
A AP P- -2 20 0 T Tr ra an ns sf fo or rm ma a e es s L Li in ne ea ar re es s
INSTITUTOMAU DE TECNOLOGIA
MAU
E EF FB B1 10 02 2 G Ge eo om me et tr ri ia a A An na al l t ti ic ca a e e l lg ge eb br ra a L Li in ne ea ar r
Em outras palavras, a matriz cannica de
B A
T T | |
B A
T T BA = . Assim,
B A BA
T T T = .
Este fato captura uma noo muito importante:
Multiplicar matrizes equivalente a compor as correspondentes transformaes lineares, formando
os fatores da direita para a esquerda.
Exemplo 3: Sejam
2 2
1
T : e
2 2
2
T : operadores lineares que rotacionam os vetores por
ngulos
1
u e
2
u , respectivamente. Assim, a operao ( )( ) ( ) ( )
2 1 2 1
T T x T T x = primeiro rotaciona x
por um ngulo
1
u e, posteriormente, rotaciona ( )
1
T x por um ngulo
2
u . Segue-se que o efeito
lquido de
2 1
T T rotacionar cada vetor x do
2
por um ngulo
1 2
u u + , como mostra a figura a
seguir.
y
x
1
u
x
( )
1
T x
( ) ( )
2 1
T T x
2
u
1 2
u u +
Assim, as matrizes cannicas destes operadores lineares
so:
| |
1 1
1
1 1
cos sen
sen cos
T
u u
u u
(
=
(
; | |
2 2
2
2 2
cos sen
sen cos
T
u u
u u
(
=
(
;
| |
( ) ( )
( ) ( )
1 2 1 2
2 1
1 2 1 2
cos sen
sen cos
T T
u u u u
u u u u
( + +
=
(
+ +
.
Estas matrizes devem satisfazer | | | || |
2 1 2 1
T T T T = . De fato, tem-se:
| || |
( )
( ) ( )
( ) ( )
| |
2 2 1 1 2 1 2 1 2 1 2 1
2 1
2 2 1 1 2 1 2 1 2 1 2 1
1 2 1 2
2 1
1 2 1 2
cos sen cos sen cos cos sen sen cos sen sen cos
sen cos sen cos sen cos cos sen sen sen cos cos
cos sen
sen cos
T T
T T
u u u u u u u u u u u u
u u u u u u u u u u u u
u u u u
u u u u
( + ( (
= =
( ( (
+ +
( + +
= =
(
+ +
Observao: Em geral, importante a ordem pela qual as transformaes lineares so compostas.
Isto era de se esperar, pois compor transformaes lineares corresponde a multiplicar as
correspondentes matrizes cannicas. E, como j fato conhecido, a ordem na qual a multiplicao de
matrizes realizada um fator de extrema relevncia.
Exemplo 4: Sejam
2 2
1
T : a reflexo em torno da reta y x = e
2 2
2
T : a projeo
ortogonal sobre o eixo y. A figura a seguir ilustra graficamente o efeito distinto que
1 2
T T e
2 1
T T
tm sobre um vetor x.
A AP P- -2 20 0 T Tr ra an ns sf fo or rm ma a e es s L Li in ne ea ar re es s
INSTITUTOMAU DE TECNOLOGIA
MAU
E EF FB B1 10 02 2 G Ge eo om me et tr ri ia a A An na al l t ti ic ca a e e l lg ge eb br ra a L Li in ne ea ar r
x
y x =
x
( )
1
T x
( ) ( )
2 1
T T x
( )
2 1
a T T
x
y x =
x
( )
2
T x
( ) ( )
1 2
T T x
( )
1 2
b T T
y y
A mesma concluso pode ser alcanada mostrando que as matrizes cannicas de
1
T e
2
T no
comutam:
| | | || | | | | || |
1 2 1 2 2 1 2 1
0 1 0 0 0 1 0 0 0 1 0 0
1 0 0 1 0 0 0 1 1 0 1 0
T T T T ; T T T T
( ( ( ( ( (
= = = = = =
( ( ( ( ( (
.
Logo, | | | |
1 2 1 2
T T T T = e as transformaes no comutam.
Exemplo 5: Sejam
2 2
1
T : a reflexo em torno do eixo y e
2 2
2
T : a reflexo em torno do
eixo x. Neste caso,
1 2
T T e
2 1
T T so idnticas; ambas aplicam cada vetor ( ) x x, y = em seu
negativo ( ) x x, y = , como mostra a figura a seguir.
x
x
( )
2
T x
( ) ( )
1 2
T T x
( )
1 2
a T T
y
x
x ( )
1
T x
( ) ( )
2 1
T T x
( )
2 1
b T T
y
( ) x, y
( ) x, y ( ) x, y
( ) x, y
( ) x, y
( ) x, y
A igualdade de
1 2
T T e
2 1
T T tambm pode ser deduzida mostrando que as matrizes
cannicas de
1
T e
2
T comutam:
| | | || | | | | || |
1 2 1 2 2 1 2 1
1 0 1 0 1 0 1 0 1 0 1 0
0 1 0 1 0 1 0 1 0 1 0 1
T T T T ; T T T T
( ( ( ( ( (
= = = = = =
( ( ( ( ( (
.
A AP P- -2 20 0 T Tr ra an ns sf fo or rm ma a e es s L Li in ne ea ar re es s
INSTITUTOMAU DE TECNOLOGIA
MAU
E EF FB B1 10 02 2 G Ge eo om me et tr ri ia a A An na al l t ti ic ca a e e l lg ge eb br ra a L Li in ne ea ar r
A composio tambm pode ser definida para trs ou mais transformaes lineares. Por
exemplo, sejam as transformaes lineares
1
n k
T : ,
2
k l
T : e
3
l m
T : . Define-se a
composta ( )( ) ( ) ( ) ( ) 3 2 1 3 2 1
T T T x T T T x = .
Mostra-se que esta composio uma transformao linear e que a matriz cannica de
3 2 1
T T T est relacionada com as matrizes cannicas de
1
T ,
2
T e
3
T por
| | | || || |
3 2 1 3 2 1
T T T T T T = .
O mesmo raciocnio se estende composio de um nmero qualquer de transformaes lineares.
4. Ncleo e imagem de transformaes lineares
Toda transformao linear
n m
T : , com matriz cannica A, uma funo. De fato, para
n
x e existe um nico
m
be tal que ( ) T x b = . Utilizando a representao da transformao
linear T por meio de sua matriz cannica A, conclui-se que sempre possvel efetuar o produto
( ) T x Ax b = = com b nico para
n
x e . Em outras palavras, o conjunto domnio de T
( ) Dom
n
T = .
O conjunto imagem de T formado por todos os elementos
m
be tal que ( ) T x b = , ou seja,
formado por todos os elementos do
m
que so mapeados (ou transformados) pela aplicao de T a
todos os vetores
n
xe . Assim:
( ) ( )
{ }
( ) Im
m n
T b |T x Ax b, x C A = e = = e = ,
uma vez que todo ( ) Im b T e uma
combinao linear das colunas de A.
Logo, a ( ) Im T um subespao do
m
.
A figura a seguir ilustra os conceitos
de domnio e imagem de uma
transformao linear. Nela tambm
so vistos os quatro subespaos
fundamentais associados matriz A.
( )
T
C A
( ) N A
( )
( ) Im
C A
T =
( )
T
N A
0 0
n m
A =
( ) ( ) Aplicao de :
n
T T x Ax b C A , x = = e e
( ) Dom
n
T =
m
Outro subespao de grande importncia relacionado a toda e qualquer transformao linear
n m
T : o ncleo (ou kernel) de T, designado por ( ) Nuc T ou ( ) Ker T . O ncleo de uma
transformao linear composto por todos os vetores do
n
xe tais que ( ) 0
m
T x Ax = = e . Esta
precisamente a definio do espao-nulo associado matriz cannica A. Logo:
A AP P- -2 20 0 T Tr ra an ns sf fo or rm ma a e es s L Li in ne ea ar re es s
INSTITUTOMAU DE TECNOLOGIA
MAU
E EF FB B1 10 02 2 G Ge eo om me et tr ri ia a A An na al l t ti ic ca a e e l lg ge eb br ra a L Li in ne ea ar r
( ) ( ) ( )
{ }
( ) Nuc Ker 0
n m
T T x |T x Ax N A = = e = = e = .
A figura a seguir ilustra o conceito de ncleo de uma transformao linear.
( )
T
C A
( )
( )
N A
Nuc T =
( )
( ) Im
C A
T =
( )
T
N A
( ) 0 T x =
n
m
5. Inversibilidade
Uma transformao linear T s admitir a existncia de uma transformao inversa
1
T
(ou
seja,
1
T
deve ser tal que ( ) ( ) ( )
( )
1 1
T T x T T x x
= = ) se T for bijetora. Uma funo dita bijetora
se for, simultaneamente, injetora e sobrejetora.
Definio 1: A transformao linear
n m
T : injetora quando a aplicao de T em vetores
distintos do
n
leva a vetores distintos em ( )
m
C A _ , como ilustra a figura a seguir.
( )
T
C A
( ) N A
( ) C A
( )
T
N A
( )
1
T x
n
m
1
x
2
x
( )
2
T x
1
b
2
b
( ) ( )
1 1 2 2
b T x b T x = = =
1 2
sempre que x x =
Definio 2: Uma transformao linear
n m
T : sobrejetora se ( ) ( ) Im
m
T C A = = , ou seja, se
todos os vetores
m
be forem mapeados pela aplicao de T a todos os vetores
n
xe .
A AP P- -2 20 0 T Tr ra an ns sf fo or rm ma a e es s L Li in ne ea ar re es s
INSTITUTOMAU DE TECNOLOGIA
MAU
E EF FB B1 10 02 2 G Ge eo om me et tr ri ia a A An na al l t ti ic ca a e e l lg ge eb br ra a L Li in ne ea ar r
Apenas uma classe de transformaes lineares pode ser bijetora (ou seja, injetora e
sobrejetora simultaneamente) e, portanto, admitir inversa. Esta limitao decorre diretamente do
Teorema Fundamental da lgebra Linear, ilustrado na figura a seguir (vide AP-19).
( )
T
C A
( ) N A
( ) C A
( )
T
N A
r
x
n
x
( ) 0
n n
T x Ax = =
( )
r r
T x Ax b = =
b
( ) T x Ax b = =
r n
x x x = +
n
m
Com base nos conceitos desenvolvidos no AP-19 Teorema Fundamental da lgebra Linear,
concluiu-se que
n
x e pode ser escrito na forma
r n
x x x = + , com
( )
T
r
x C A e e ( )
n
x N A e . Ento:
( ) ( ) ( ) ( )
r n r n r n r
T x T x x T x T x Ax Ax Ax b = + = + = + = = , pois ( )
n
x N A e e assim ( ) 0
n
T x = .
Do raciocnio anterior, tem-se ( ) ( )
r
T x b T x = = . Logo,
n m
T : s injetora se, e
somente se, ( ) ( )
r r
T x T x x x = = . Ou, equivalentemente:
( )
T n
C A = (ou ( ) { } 0 N A = ). Desta
maneira, ( ) pos A n = e ( ) nul 0 A = .
Uma vez que ( ) ( ) dim pos C A A n m = = < , tem-se ( )
m
C A = . Assim,
( )
{ } 0
T
N A = . Isto
implica em que ( ) no sobrejetora
m
y |y C A T - e e .
Em suma: Uma transformao linear
n m
T : s admite uma transformao linear inversa
1 m n
T :
se, e somente se:
-
( )
T n
C A = , ou equivalentemente, ( ) pos A n = e ( ) nul 0 A = ;
- m n = , ou seja, T um operador linear.
Exemplo 6: O operador linear
3 3
T : que projeta todos os vetores do
3
no plano Oxy no
inversvel. De fato, a matriz cannica | | T A = :
A AP P- -2 20 0 T Tr ra an ns sf fo or rm ma a e es s L Li in ne ea ar re es s
INSTITUTOMAU DE TECNOLOGIA
MAU
E EF FB B1 10 02 2 G Ge eo om me et tr ri ia a A An na al l t ti ic ca a e e l lg ge eb br ra a L Li in ne ea ar r
( )
1 0 0
0 1 0 pos 2 3
0 0 0
A A
(
(
= = <
(
(
, condio necessria para que o operador seja inversvel.
simples verificar que T no pode admitir inversa do
ponto de vista geomtrico. A figura ao lado indica que
impossvel decidir qual vetor x do domnio de T deu
origem projeo ( ) T x . De fato, qualquer vetor com
extremidade sobre a reta r da figura exibe a mesma
projeo no plano Oxy. O mesmo raciocnio se estende
a qualquer reta r paralela ao eixo Oz. Ou seja, T no
injetora e tambm no sobrejetora.
x
y
z
O
2
x
( )
i i
T x Ax =
r
1
x
3
x
Do ponto de vista matricial, como possvel verificar se um operador linear T inversvel?
Para responder a esta questo, seja T um operador linear do
n
com matriz cannica A (nxn). Se T
admite inversa, ento existe um operador linear
1
T
, com matriz cannica B (nxn) tal que:
1 1
I
T T T T T
= = (operador identidade).
Isto implica em que | |
1 1 1
I
T T T T T AB BA I B A
( (
= = = = =
.
Assim, o operador T s admite inversa se, e somente se, sua matriz cannica inversvel. E
mais, a matriz cannica do operador inverso ser a inversa da matriz cannica do operador original.
Exemplo 7: O operador linear T de rotao (anti-horria) no
2
por um ngulo u, com matriz
cannica
cos sen
sen cos
A
u u
u u
(
=
(
inversvel. Pode-se verificar este fato por meio de ( ) pos 2 A = (T bijetor) ou por do ( ) det 1 0 A = =
(A inversvel). O operador linear inverso
1
T
representa uma rotao horria por um ngulo u, ou
equivalentemente, uma rotao anti-horria por um ngulo u . Assim:
( ) ( )
( ) ( )
1 1
cos sen cos sen
ortogonal
sen cos sen cos
T
T A A A
u u u u
u u u u
( (
(
= = = =
(
(
.
A AP P- -2 20 0 T Tr ra an ns sf fo or rm ma a e es s L Li in ne ea ar re es s
INSTITUTOMAU DE TECNOLOGIA
MAU
E EF FB B1 10 02 2 G Ge eo om me et tr ri ia a A An na al l t ti ic ca a e e l lg ge eb br ra a L Li in ne ea ar r
Exerccios propostos:
E01. Use o conceito de linearidade para verificar quais dentre as transformaes a seguir so
lineares:
a)
2 3
T : tal que ( ) ( ) 1 T x, y x , y, x y = + +
b)
3 3
T : tal que ( ) ( ) T x, y, z x y, y, x z = +
c)
2 2
T : tal que ( )
( )
2 2 2 2
T x, y x y , x y = +
d)
2 2
T : tal que | |
( )
| |
T T
T x y x y y =
E02. Utilizando o Teorema 01, construa as matrizes cannicas das transformaes lineares:
a)
2 2
T : que projeta os vetores ortogonalmente sobre o eixo Ox e em seguida reflete
estes vetores em torno do eixo Oy.
b)
2 2
T : que reflete os vetores em torno da reta y x = e em seguida reflete estes
vetores em torno do eixo Ox.
c)
2 2
T : que dilata os vetores por um fator 3, em seguida reflete estes vetores em torno
da reta y x = e finalmente projeta estes vetores ortogonalmente sobre o eixo Oy.
d)
3 3
T : que reflete os vetores em torno do plano Oxz e em seguida contrai estes
vetores por um fator 1 5 .
e)
3 3
T : que projeta os vetores ortogonalmente sobre o plano Oxz e em seguida projeta
estes vetores ortogonalmente sobre o plano Oxy.
f)
3 3
T : que reflete os vetores em torno do plano Oxy, em seguida reflete estes vetores
em torno do plano Oxz e finalmente reflete estes vetores em torno do plano Oyz.
E03. Seja l a reta do plano Oxy que passa pela origem e que faz
um ngulo u com o eixo Ox positivo, em que 0 u t s < . Seja
2 2
T : o operador linear que reflete cada vetor em torno da
reta l.
a) Use o Teorema 01 para encontrar a matriz cannica de T.
b) Encontre a reflexo do vetor | | 1 5
T
x = em torno da reta l
pela origem formando um ngulo de 30 u = com o eixo Ox
positivo.
x
( ) T x
y x
u
l
A AP P- -2 20 0 T Tr ra an ns sf fo or rm ma a e es s L Li in ne ea ar re es s
INSTITUTOMAU DE TECNOLOGIA
MAU
E EF FB B1 10 02 2 G Ge eo om me et tr ri ia a A An na al l t ti ic ca a e e l lg ge eb br ra a L Li in ne ea ar r
E04. Encontre a matriz cannica para a composio dada de operadores do
2
.
a) Uma rotao de 90 seguida de uma reflexo em torno da reta y x = .
b) Uma projeo ortogonal sobre o eixo Ou seguida de uma contrao de razo 1 2 k = .
c) Uma reflexo em torno do eixo Ox seguida de uma dilatao de razo 3 k = .
d) Uma rotao de 60 , seguida de uma projeo ortogonal sobre o eixo Ox, seguida de uma
reflexo em torno da reta y x = .
e) Uma dilatao de razo 2 k = , seguida de uma rotao de 45 , seguida de uma reflexo em
torno do eixo Oy.
f) Uma rotao de 15 , seguida de uma rotao de 105 , seguida de uma rotao de 60 .
E05. Encontre a matriz cannica para a composio dada de operadores do
3
.
a) Uma reflexo em torno do plano Oxy, seguida de uma projeo ortogonal sobre o plano Oxz.
b) Uma rotao de 45 em torno do eixo Oy, seguida de uma dilatao de razo 2 k = .
c) Uma projeo ortogonal sobre o plano Oxy, seguida de uma reflexo em torno do plano Oyz.
d) Uma rotao de 30 em torno do eixo Ox, seguida de uma rotao de 30 em torno do eixo Oz,
seguida de uma concentrao de razo 1 4 k = .
e) Uma reflexo em torno do plano Oxy, seguida de uma reflexo em torno do plano Oxz, seguida de
uma projeo ortogonal sobre o plano Oyz.
f) Uma rotao de 270 em torno do eixo Ox, seguida de uma rotao de 90 em torno do eixo Oy,
seguida de uma rotao de 180 em torno do eixo Oz.
E06. Determine se
1 2 2 1
T T T T = .
a)
2 2
1
T : a projeo ortogonal sobre o eixo Ox e
2 2
2
T : a projeo ortogonal sobre o
eixo Oy.
b)
2 2
1
T : a rotao por um ngulo
1
u e
2 2
2
T : a rotao por um ngulo
2
u .
c)
2 2
1
T : a projeo ortogonal sobre o eixo Ox e
2 2
2
T : a rotao por um ngulo u .
d)
3 3
1
T : a dilatao de razo k e
3 3
2
T : a rotao em torno do eixo Oz por um
ngulo u .
e)
3 3
1
T : a rotao em torno do eixo Ox por um ngulo
1
u e
3 3
2
T : a rotao em
torno do eixo Oz por um ngulo
2
u .
E07. Determine bases para o ncleo e para a imagem das transformaes lineares que possuem as
matrizes cannicas a seguir:
A AP P- -2 20 0 T Tr ra an ns sf fo or rm ma a e es s L Li in ne ea ar re es s
INSTITUTOMAU DE TECNOLOGIA
MAU
E EF FB B1 10 02 2 G Ge eo om me et tr ri ia a A An na al l t ti ic ca a e e l lg ge eb br ra a L Li in ne ea ar r
a)
1 1 3
5 4 4
7 6 2
A
(
(
=
(
(
b)
2 0 1
4 0 2
0 0 0
A
(
(
=
(
(
c)
1 4 5 2
2 1 3 0
1 3 2 2
A
(
(
=
(
(
E08. Verificar se as transformaes lineares possuem inversa. Em caso positivo, determine as
matrizes cannicas de tais transformaes.
E09. Ser injetora a composta de transformaes lineares injetoras? Justifique sua resposta.
E10. Pode ser injetora a composta de uma transformao linear injetora com uma transformao
linear que no injetora? Permita ambas ordens de composio e justifique sua resposta.
E11. Seja uma transformao linear
4 3
T : , com
( ) ( ) ( ) 5 2 4 2 3 2 2 3 T x T x, y, z,t x y z t, x y t, x y z t = = + + + + + + + + .
a) Construa a matriz cannica | | T A = da transformao linear T.
b) Determine uma base do ( ) Nuc T e da ( ) Im T . Indique tambm os valores do
( ) ( ) pos pos T A = e da ( ) ( ) nul nul T A = .
c) O vetor ( ) ( ) 0 3 4 v , , C A = e ? Justifique sua resposta.
d) Determine os parmetros m e n para que o vetor ( ) ( ) 3 14 Nuc w ,m, ,n T = e .
E12. Sejam os operadores do
2
: T1: reflexo em torno do eixo Oy;
T2: projeo ortogonal no eixo Ox.
a) Determine a matriz cannica | | T do operador composto
1 2
T T T = .
b) O operador composto T injetor? Justifique.
E13. Seja uma transformao linear
3 4
T : , com
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
1 2 3
1 0 0 1 2 1 4 0 1 0 2 1 0 1 0 0 1 1 1 0 1 T e T , , , , , ; T e T , , , , , ; T e T , , , , , = = = = = =
em que { }
1 2 3
F e ,e ,e = a base cannica do
3
.
a) Construa a matriz cannica | | T A = da transformao linear T.
b) Determine uma base do ( ) Nuc T e da ( ) Im T . Indique tambm os valores do
( ) ( ) pos pos T A = e da ( ) ( ) nul nul T A = .
c) O vetor ( ) ( ) 0 3 4 v , , N A = e ? Justifique sua resposta.
d) Determine o valor do parmetro q para que o vetor ( ) ( ) 4 2 1 w , , ,q C A = e .
A AP P- -2 20 0 T Tr ra an ns sf fo or rm ma a e es s L Li in ne ea ar re es s
INSTITUTOMAU DE TECNOLOGIA
MAU
E EF FB B1 10 02 2 G Ge eo om me et tr ri ia a A An na al l t ti ic ca a e e l lg ge eb br ra a L Li in ne ea ar r
E14. Seja
2 2
1
T : com
| |
1
1 2
0 1
T A
(
= =
(
.
a) Aplique a transformao T1 na figura a seguir, representando graficamente sua imagem
no mesmo sistema de eixos.
b) Seja
2 2
2
T : o operador linear que reflete cada vetor em relao reta y = x.
b.i) Construa a matriz cannica | |
2
T do operador T2.
b.ii) Determine a matriz cannica | | T do operador composto
1 2
T T T = .
b.iii) O operador composto T injetor? Justifique sua resposta.
c) Prove que um operador linear T do
n
9 sempre mapeia uma reta { r P u v = + do
n
9 em
outra reta s, na imagem ( ) Im T .
Вам также может понравиться
- Poema Falado - : Língua PortuguesaДокумент19 страницPoema Falado - : Língua PortuguesadkauangoudОценок пока нет
- Boas Práticas de Manipulação de Produtos EstéreisДокумент12 страницBoas Práticas de Manipulação de Produtos EstéreisgbmmmОценок пока нет
- Psicologia Do Desenvolvimento Da Criança e Do Adolescente - Unidade1Документ13 страницPsicologia Do Desenvolvimento Da Criança e Do Adolescente - Unidade1Anabela SousaОценок пока нет
- (Des) Localização Do Meio e Outras Rotas - Tese Claudia ZimmerДокумент234 страницы(Des) Localização Do Meio e Outras Rotas - Tese Claudia ZimmerelaineОценок пока нет
- Trabalho Sobre Metodos de Gestao de StockДокумент19 страницTrabalho Sobre Metodos de Gestao de Stockjoao sitoeОценок пока нет
- Trabalho 01.1 - Homicídio Privilegiado, Eutanásia e OrtotanásiaДокумент2 страницыTrabalho 01.1 - Homicídio Privilegiado, Eutanásia e OrtotanásiaVanderlei BalsanelliОценок пока нет
- Tabela de Referência FisioquanticДокумент2 страницыTabela de Referência FisioquanticAdriana Sampaio100% (2)
- Barbieri Et Al - 2008 - Geração de Idéias para InovaçõesДокумент17 страницBarbieri Et Al - 2008 - Geração de Idéias para InovaçõesHellder HeideggerОценок пока нет
- Bula 1661445962942Документ12 страницBula 1661445962942Marco AntonioОценок пока нет
- Ficha de Portugues - 2ano PDFДокумент3 страницыFicha de Portugues - 2ano PDFmoandreaОценок пока нет
- Luiza Mahin - Uma Rainha Africana No BrasilДокумент76 страницLuiza Mahin - Uma Rainha Africana No BrasilCarol SantosОценок пока нет
- Erich Von Daniken - O Dia em Que Os Deuses ChegaramДокумент115 страницErich Von Daniken - O Dia em Que Os Deuses ChegaramGinamagalhãesОценок пока нет
- Ensaio A Vazio e em CC Do MITДокумент20 страницEnsaio A Vazio e em CC Do MITVinicius MazucaОценок пока нет
- Ensaio - Psicologia - Andressa GoncalvesДокумент6 страницEnsaio - Psicologia - Andressa GoncalvesAndressaGonçalvesОценок пока нет
- Museu Virtual 4 UnidadeДокумент13 страницMuseu Virtual 4 UnidadeClecia OliveiraОценок пока нет
- Dentifrícios Na Primeira InfânciaДокумент1 страницаDentifrícios Na Primeira Infânciadani_roroОценок пока нет
- 0730 - Monitorização e Medição de ProcessosДокумент114 страниц0730 - Monitorização e Medição de Processosisabel roseiro100% (1)
- Cartas Às Missoes Estrangeiras em NY - Alberto C.C. RibeiroДокумент112 страницCartas Às Missoes Estrangeiras em NY - Alberto C.C. RibeiroWesley Porfírio NobreОценок пока нет
- MG Estado de Minas 021223Документ47 страницMG Estado de Minas 021223catinga46Оценок пока нет
- Edital 31020703Документ16 страницEdital 31020703WILLIAN OLIVEIRAОценок пока нет
- Hannah ArendtДокумент7 страницHannah ArendtLaurelia MonteiroОценок пока нет
- Devoção Dos Cinco Primeiros SábadosДокумент2 страницыDevoção Dos Cinco Primeiros SábadosCleiton B CostaОценок пока нет
- Lista de Aprovados PMDFДокумент445 страницLista de Aprovados PMDF7z2hbgvpqxОценок пока нет
- A Lua No CinemaДокумент5 страницA Lua No CinemaMilena GuedesОценок пока нет
- Sombras Urbanas Livro BasicopdfДокумент371 страницаSombras Urbanas Livro BasicopdfLara P. CarvalhoОценок пока нет
- 2 LISTA DE RESIST 2 ESTRUT 3 Torção PDFДокумент3 страницы2 LISTA DE RESIST 2 ESTRUT 3 Torção PDFfranciscomarcio_engОценок пока нет
- Batistas Não São ProtestantesДокумент3 страницыBatistas Não São ProtestantesLásaro G. da SilvaОценок пока нет
- DinoenhuevoДокумент13 страницDinoenhuevoRiquirran Art100% (14)
- Nom#25 Fevereiro2020 PDFДокумент81 страницаNom#25 Fevereiro2020 PDFMagusAndréLОценок пока нет
- Texto Sobre Legalização Da MaconhaДокумент1 страницаTexto Sobre Legalização Da MaconhaAmareloОценок пока нет