Вам также может понравиться
- (Soldering and Surface Mount Technology) Reliability of Unencapsulated SMD Plastic Film CapacitorsДокумент8 страниц(Soldering and Surface Mount Technology) Reliability of Unencapsulated SMD Plastic Film CapacitorsradiobrunoОценок пока нет
- Using Texas Instruments Spice Models in Electronics WorkbenchДокумент16 страницUsing Texas Instruments Spice Models in Electronics WorkbenchradiobrunoОценок пока нет
- Asus k50c SCHДокумент2 страницыAsus k50c SCHradiobrunoОценок пока нет
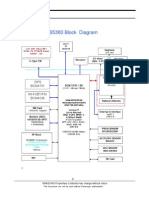
- GT S5360Документ51 страницаGT S5360radiobrunoОценок пока нет
- Digital Multimeter TutorialsДокумент15 страницDigital Multimeter TutorialsBình MinhОценок пока нет
- Practical Guide To InstrumentationДокумент12 страницPractical Guide To InstrumentationradiobrunoОценок пока нет
- AbauthДокумент1 страницаAbauthradiobrunoОценок пока нет
- 10Документ14 страниц10radiobrunoОценок пока нет
- High Voltage Power SupplyДокумент2 страницыHigh Voltage Power SupplyradiobrunoОценок пока нет
- Difetti VCRДокумент166 страницDifetti VCRradiobruno67% (3)
- Acer Ferrari 3000 Service ManualДокумент109 страницAcer Ferrari 3000 Service ManualradiobrunoОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Ion Implantation in Finfet Technology Using Tsuprem-4Документ61 страницаIon Implantation in Finfet Technology Using Tsuprem-4Sahil YadavОценок пока нет
- 2SK2485 o K2485Документ8 страниц2SK2485 o K2485Kevin HernandezОценок пока нет
- Review Letters F: Physic:AiДокумент4 страницыReview Letters F: Physic:AiPavel Castro-VillarrealОценок пока нет
- SYLLABUS Ece 331Документ3 страницыSYLLABUS Ece 331XackCollinsОценок пока нет
- 반도체소자 기말 (2022)Документ8 страниц반도체소자 기말 (2022)지눈Оценок пока нет
- (0 - 0) (CV) The - First - Microprocessor - An - Interview - With - MarcianДокумент7 страниц(0 - 0) (CV) The - First - Microprocessor - An - Interview - With - MarcianSarhro ELОценок пока нет
- Nce 8295 AkДокумент7 страницNce 8295 Akandre kressnerОценок пока нет
- Mmuh Slides s04Документ10 страницMmuh Slides s04Murali GowdaОценок пока нет
- Gold Wire Makes Contact From Bonding Pads On Chip To Package Gold Wire Is Formed Into Ball To Make Contact Uses An Ultrasonic Process & Heat Process Called "Ball Bonding"Документ32 страницыGold Wire Makes Contact From Bonding Pads On Chip To Package Gold Wire Is Formed Into Ball To Make Contact Uses An Ultrasonic Process & Heat Process Called "Ball Bonding"apurva guptaОценок пока нет
- STMicroelectronics EUROPRACTICE v1 2020 01 01Документ2 страницыSTMicroelectronics EUROPRACTICE v1 2020 01 01FunnypoumОценок пока нет
- Logic Design Lab ManualДокумент72 страницыLogic Design Lab ManualHitha Gangatkar100% (1)
- 4 Study of Characteristics of SCR, MOSFET & IGBTДокумент12 страниц4 Study of Characteristics of SCR, MOSFET & IGBTSeminars BRECWОценок пока нет
- Vlsi Bits SyllabusДокумент4 страницыVlsi Bits Syllabuspraveenreddy7Оценок пока нет
- B.Tech EC Syllabus 3rd YearДокумент35 страницB.Tech EC Syllabus 3rd Yearpcjoshi02Оценок пока нет
- Fund. Of. Electronics-ch01-Course OutlineДокумент30 страницFund. Of. Electronics-ch01-Course OutlineHaneen AlSuradiОценок пока нет
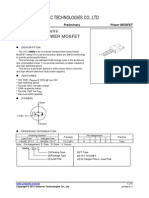
- Optimos™ Source-Down Power Mosfet 25-150 V: An Innovative PQFN 3.3X3.3 MM Product FamilyДокумент2 страницыOptimos™ Source-Down Power Mosfet 25-150 V: An Innovative PQFN 3.3X3.3 MM Product FamilyasasasasasОценок пока нет
- Aqueous Solution-Gel Preparation of Ultrathin Zro Films For Gate Dielectric ApplicationДокумент23 страницыAqueous Solution-Gel Preparation of Ultrathin Zro Films For Gate Dielectric Applicationvick EОценок пока нет
- Analog CMOS Circuit Design - Allen & HolbergДокумент342 страницыAnalog CMOS Circuit Design - Allen & HolbergClaudio HinojozaОценок пока нет
- 01 Logic DesignДокумент53 страницы01 Logic DesignShouvik MusavvirОценок пока нет
- Icl7660 PDFДокумент11 страницIcl7660 PDFfran01334Оценок пока нет
- 18N50Документ6 страниц18N50juliojuderОценок пока нет
- Ir 2151Документ6 страницIr 2151RintheGreatОценок пока нет
- Bilateral SwitchДокумент7 страницBilateral SwitchKevin Maniego CalannoОценок пока нет
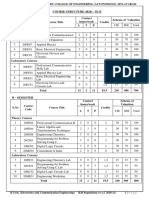
- R20 ECE SyllabusДокумент126 страницR20 ECE Syllabussubbu subrahmanyamОценок пока нет
- STR A6252 Allegro MicroSystemsДокумент7 страницSTR A6252 Allegro MicroSystemsSergio ReyesОценок пока нет
- STR2A100 Series Application Note (Rev.0.3) : Sanken Electric Co., LTDДокумент18 страницSTR2A100 Series Application Note (Rev.0.3) : Sanken Electric Co., LTDBertrand Soppo YokiОценок пока нет
- IRF6215 DatasheetzДокумент9 страницIRF6215 DatasheetzBoniface AsuvaОценок пока нет
- EEE 231 CoursecontentДокумент3 страницыEEE 231 Coursecontentfakiha11Оценок пока нет
- Gate 2022Документ68 страницGate 2022kanhaiyak6Оценок пока нет
- SW3205 Samwin: FeaturesДокумент7 страницSW3205 Samwin: FeaturesYousef KassimОценок пока нет