Вам также может понравиться
- Niños HeroesДокумент2 страницыNiños HeroesEmmanuel GenaroОценок пока нет
- Tratabilidad Fisicoquímica de Lixiviados Generados en El Tiradero Municipal de Guanajuato LaloДокумент6 страницTratabilidad Fisicoquímica de Lixiviados Generados en El Tiradero Municipal de Guanajuato LaloEmmanuel GenaroОценок пока нет
- Como Nació El SolДокумент2 страницыComo Nació El SolEmmanuel GenaroОценок пока нет
- Antibiotic OsДокумент2 страницыAntibiotic OsEmmanuel GenaroОценок пока нет
- ArteriosclerosisfdsfssdffsdДокумент22 страницыArteriosclerosisfdsfssdffsdEmmanuel GenaroОценок пока нет
- Proyecto 5 S Erendira Castillo ArellanoДокумент109 страницProyecto 5 S Erendira Castillo ArellanoEmmanuel GenaroОценок пока нет
- Aprender A Razonar - Junta de Andalucia PrimariaДокумент15 страницAprender A Razonar - Junta de Andalucia PrimariaferniorotavaОценок пока нет
- 3 IdiotasДокумент2 страницы3 IdiotasEmmanuel GenaroОценок пока нет
- Sistema Nervioso - EveДокумент7 страницSistema Nervioso - EveEmmanuel GenaroОценок пока нет
- Qué Es El AlcoholismoДокумент1 страницаQué Es El AlcoholismoEmmanuel GenaroОценок пока нет
- Pre HistoriaДокумент3 страницыPre HistoriaEmmanuel GenaroОценок пока нет
- Proyecto Casa InteligenteДокумент7 страницProyecto Casa InteligenteEmmanuel GenaroОценок пока нет
- CompetenciasДокумент2 страницыCompetenciasEmmanuel GenaroОценок пока нет
- Imagenes de MedicamentosДокумент1 страницаImagenes de MedicamentosEmmanuel GenaroОценок пока нет
- Plan de PrácticaДокумент4 страницыPlan de PrácticaEmmanuel GenaroОценок пока нет
- EscuelaДокумент1 страницаEscuelaEmmanuel GenaroОценок пока нет
- El Árbol de PorfirioДокумент4 страницыEl Árbol de PorfirioEmmanuel GenaroОценок пока нет
- Analisis de La SituacionДокумент3 страницыAnalisis de La SituacionEmmanuel GenaroОценок пока нет
- Control PidДокумент1 страницаControl PidEmmanuel GenaroОценок пока нет
- Ejemplo de Palabras EsdrújulasДокумент2 страницыEjemplo de Palabras EsdrújulasEmmanuel GenaroОценок пока нет
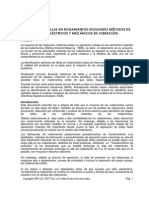
- Detectanto Fallas en Rodamientos Utilizando Metodos Electrico y Mecanicos de VibracionДокумент14 страницDetectanto Fallas en Rodamientos Utilizando Metodos Electrico y Mecanicos de VibracionEmmanuel GenaroОценок пока нет
- Press Arranque - PPTX (Autoguardado)Документ9 страницPress Arranque - PPTX (Autoguardado)Emmanuel GenaroОценок пока нет
- Descripción de La CompañíaДокумент23 страницыDescripción de La CompañíaEmmanuel GenaroОценок пока нет
- BrasilДокумент8 страницBrasilEmmanuel GenaroОценок пока нет
- DragonДокумент1 страницаDragonEmmanuel GenaroОценок пока нет
- Cuadros ComparativosДокумент2 страницыCuadros ComparativosEmmanuel GenaroОценок пока нет
- Acuerdos Mundiales Sobre El Medio AmbienteДокумент3 страницыAcuerdos Mundiales Sobre El Medio AmbienteEmmanuel GenaroОценок пока нет
- Fidel CastroДокумент3 страницыFidel CastroEmmanuel GenaroОценок пока нет
- Pasos Del Proyecto de InvestigacionДокумент5 страницPasos Del Proyecto de InvestigacionEmmanuel GenaroОценок пока нет
- Manual de Usuario RecargakiДокумент16 страницManual de Usuario RecargakiEmmanuel GenaroОценок пока нет
- LanaVidrioComposicionUsosДокумент6 страницLanaVidrioComposicionUsosPedro Ramos GarridoОценок пока нет
- Practica Nº3Документ4 страницыPractica Nº3Migraciones GrupoОценок пока нет
- 1ER PARCIAL Grupo Eimy Nathaly 8G2Документ22 страницы1ER PARCIAL Grupo Eimy Nathaly 8G2Daniela MartínezОценок пока нет
- Evaluación Reglas Vida-Negativa ResponsableДокумент5 страницEvaluación Reglas Vida-Negativa Responsabletapia manОценок пока нет
- Inf. Residente Marzo 2020 PalpaДокумент36 страницInf. Residente Marzo 2020 PalpaJeison Francis Huamani ZamoraОценок пока нет
- Importancia de las herramientas y equipamiento en el tallerДокумент2 страницыImportancia de las herramientas y equipamiento en el tallerFrancisco Rodriguez CozarОценок пока нет
- Mapa KaizenДокумент1 страницаMapa KaizenlauraОценок пока нет
- Microblaze MCS TutorialДокумент10 страницMicroblaze MCS TutorialJulio CAОценок пока нет
- Curriculum Vitae Teknia Service Experts - 23Документ8 страницCurriculum Vitae Teknia Service Experts - 23amairanihelenaОценок пока нет
- Solidworks Rueda de GinebraДокумент38 страницSolidworks Rueda de GinebraJoselito Sánchez Pérez100% (3)
- Tmert VivexДокумент39 страницTmert VivexSebastian Narvaez BerettaОценок пока нет
- 4 Transporte de FluidosДокумент156 страниц4 Transporte de FluidosLiliana AlbánОценок пока нет
- 2006 Memoria FerrovialДокумент319 страниц2006 Memoria FerrovialferrovialОценок пока нет
- Lub-Oilgas 40Документ1 страницаLub-Oilgas 40ElizbethОценок пока нет
- Simulacion MatematicaДокумент15 страницSimulacion MatematicaAlejandro RodriguezОценок пока нет
- Ejercicios de EstaticaДокумент5 страницEjercicios de EstaticaFermin GonzalezОценок пока нет
- Adquisición de EPP para mejora de agua potableДокумент2 страницыAdquisición de EPP para mejora de agua potableDåvîd JrdОценок пока нет
- 6.1 Principios de Funcionamiento y OperaciónДокумент3 страницы6.1 Principios de Funcionamiento y Operaciónlupita ramosОценок пока нет
- Asfaltos01 MSCR JNRДокумент24 страницыAsfaltos01 MSCR JNRWilfredo TejerinaОценок пока нет
- Artículo Científico de Mecánica de Los FluidosДокумент6 страницArtículo Científico de Mecánica de Los Fluidosalmahon0% (1)
- Diseño de SifonesДокумент9 страницDiseño de SifonesWalter Orlando Collazos FloresОценок пока нет
- Resolucion de Parcial 2 CARDENAS ROMERO CARLOS SUELOS 2Документ8 страницResolucion de Parcial 2 CARDENAS ROMERO CARLOS SUELOS 2Kevin ManrriqueОценок пока нет
- Materiales de ConstruccionДокумент61 страницаMateriales de ConstruccionSteeven CampañaОценок пока нет
- Factor de CompresibilidadДокумент9 страницFactor de CompresibilidadCELYОценок пока нет
- Fundamentos electromecánica Mecánica IДокумент2 страницыFundamentos electromecánica Mecánica IN David Perez MОценок пока нет
- Volume Nes Molar Es Parcial EsДокумент34 страницыVolume Nes Molar Es Parcial EszekyvillagarciaОценок пока нет
- Recuperacion de Calor CALDERASДокумент97 страницRecuperacion de Calor CALDERASAlex MarlonОценок пока нет
- Catalogo Plancha IndustrialДокумент24 страницыCatalogo Plancha IndustrialisogoldОценок пока нет
- Tarea 4 PilotesДокумент2 страницыTarea 4 PilotesRaul AlvarezОценок пока нет
- Informe Iluminacion 2 0Документ16 страницInforme Iluminacion 2 0Wendy AlianОценок пока нет