Вам также может понравиться
- Year 5 Maths RevisionДокумент26 страницYear 5 Maths RevisionWilsonBrendan100% (4)
- Solve Ode Pde Using MatlabДокумент27 страницSolve Ode Pde Using MatlabSaddy KhanОценок пока нет
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsОт EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsОценок пока нет
- Partial Differential EquationДокумент9 страницPartial Differential EquationEng Shakir H100% (1)
- Elements of Optimal Control Theory Pontryagin's Maximum PrincipleДокумент11 страницElements of Optimal Control Theory Pontryagin's Maximum PrinciplefaskillerОценок пока нет
- Laboratory 3 Digital Filter DesignДокумент8 страницLaboratory 3 Digital Filter DesignModitha LakshanОценок пока нет
- Unit 3 (SAMPLE AND SAMPLE DISTRIBUTIONS)Документ32 страницыUnit 3 (SAMPLE AND SAMPLE DISTRIBUTIONS)Zara Nabilah100% (2)
- MIT Numerical PDEДокумент119 страницMIT Numerical PDEKruger JoeОценок пока нет
- Physics - Allum and Morris - Hodder 2023Документ636 страницPhysics - Allum and Morris - Hodder 2023Jathin Siddartha ReddyОценок пока нет
- Why Phi - A Derivation of The Golden Mean Ratio Based On Heterodyne Phase ConjugationДокумент7 страницWhy Phi - A Derivation of The Golden Mean Ratio Based On Heterodyne Phase Conjugationpipul36Оценок пока нет
- Chia Green PaperДокумент44 страницыChia Green PaperMuhammad TabishОценок пока нет
- Java Programming TutorialДокумент121 страницаJava Programming TutorialEclud AirelaОценок пока нет
- PDE Answers-2-2011Документ11 страницPDE Answers-2-2011Sandeep Saju100% (1)
- Mathematics For Electrical Engineering I: Dr. G.A. PavliotisДокумент67 страницMathematics For Electrical Engineering I: Dr. G.A. PavliotisKhoirul WaladОценок пока нет
- Pde ToolДокумент11 страницPde ToolCristóbal Alberto Campos MuñozОценок пока нет
- Partial Differential EquationsДокумент11 страницPartial Differential EquationsSaadFarooqОценок пока нет
- Advection Eqn Is UnstableДокумент9 страницAdvection Eqn Is UnstableZakria ToorОценок пока нет
- A First-Order Pdes: A.1 Wave Equation With Constant SpeedДокумент6 страницA First-Order Pdes: A.1 Wave Equation With Constant SpeedshayandevОценок пока нет
- Strauss PDEch 14 S 1 P 03Документ3 страницыStrauss PDEch 14 S 1 P 03Naman PriyadarshiОценок пока нет
- Partial Differential Equations (Pdes)Документ5 страницPartial Differential Equations (Pdes)uploadingpersonОценок пока нет
- Exercise 1Документ4 страницыExercise 1Gloria Muñoz PiraquiveОценок пока нет
- Local Bifurcations of Nonlinear Hybrid SystemsДокумент4 страницыLocal Bifurcations of Nonlinear Hybrid SystemsmenguemengueОценок пока нет
- PDEДокумент39 страницPDEchandra kantОценок пока нет
- Lecture1426865066 PDFДокумент53 страницыLecture1426865066 PDFEhab AhmedОценок пока нет
- Introduction To Partial Differential Equations - G. E. Urroz (NM)Документ25 страницIntroduction To Partial Differential Equations - G. E. Urroz (NM)Tony StarkОценок пока нет
- Solutions21 3Документ8 страницSolutions21 3Mohamed1994Оценок пока нет
- Lecture Note 580507181057380Документ59 страницLecture Note 580507181057380Anmol AroraОценок пока нет
- The Wave Equation On RДокумент12 страницThe Wave Equation On RElohim Ortiz CaballeroОценок пока нет
- CMfAA Notes Chapter2Документ29 страницCMfAA Notes Chapter2Nicolas BrughmansОценок пока нет
- Weatherwax Leveque SolutionsДокумент126 страницWeatherwax Leveque SolutionshahahihiОценок пока нет
- Lecture 10Документ8 страницLecture 10EdutamОценок пока нет
- Brief Notes On Solving PDE's and Integral EquationsДокумент11 страницBrief Notes On Solving PDE's and Integral Equations140557Оценок пока нет
- Partial Differential Equations in MATLAB 7.0Документ28 страницPartial Differential Equations in MATLAB 7.0ah_madadiОценок пока нет
- Week 3Документ81 страницаWeek 3Joceal1989Оценок пока нет
- 32 5 Hypblc PdeДокумент12 страниц32 5 Hypblc PdeEbookcrazeОценок пока нет
- Kef 1.2 PDFДокумент34 страницыKef 1.2 PDFmariaОценок пока нет
- Assignment 3Документ11 страницAssignment 3tiffanyyy00Оценок пока нет
- Finite Element Methods For Option PricingДокумент12 страницFinite Element Methods For Option PricingDaniel Fernandez O'DoghertyОценок пока нет
- Vibrations of StructuresДокумент9 страницVibrations of StructuresRafaAlmeidaОценок пока нет
- Results About Heat EquationsДокумент7 страницResults About Heat EquationsAdi SubbuОценок пока нет
- Prob 4Документ12 страницProb 4Md Arif Hasan50% (2)
- Analytical Method For The Traffic Flow ModelДокумент8 страницAnalytical Method For The Traffic Flow Modelhkabir_juОценок пока нет
- Strauss PDEch 2 S 1 P 4Документ4 страницыStrauss PDEch 2 S 1 P 4amirfattah5Оценок пока нет
- Vim MethodДокумент7 страницVim MethodLaksh MananОценок пока нет
- Method of Bifurcation Analysis of Hybrid Nonlinear Systems: Quentin BRANDON and Tetsushi UETA Dani'Ele Fournier-PrunaretДокумент4 страницыMethod of Bifurcation Analysis of Hybrid Nonlinear Systems: Quentin BRANDON and Tetsushi UETA Dani'Ele Fournier-PrunaretmenguemengueОценок пока нет
- Chapter 1 SolutionsДокумент14 страницChapter 1 SolutionsxdsxcОценок пока нет
- Classical Mechanics Problems:: U X y X yДокумент4 страницыClassical Mechanics Problems:: U X y X yEvaОценок пока нет
- Tutorial 5 PDEДокумент2 страницыTutorial 5 PDENurul AlizaОценок пока нет
- Script Numpde11Документ154 страницыScript Numpde11Harold ContrerasОценок пока нет
- Adaptive Lecture04 2005Документ28 страницAdaptive Lecture04 2005Cuter HsuОценок пока нет
- MA 542 - Differential Equations: End-Semester Examination Department of MathematicsДокумент2 страницыMA 542 - Differential Equations: End-Semester Examination Department of MathematicsNaveen GuptaОценок пока нет
- LECTURE 2 First Week Functions of Several Vareables S2 2015-2016Документ19 страницLECTURE 2 First Week Functions of Several Vareables S2 2015-2016FaIz FauziОценок пока нет
- Set5 03Документ3 страницыSet5 03masyuki1979Оценок пока нет
- ثالث معادلات جزئيةДокумент26 страницثالث معادلات جزئيةAli Hyder KolachiОценок пока нет
- Computing The (CDF) F (X) P (X X) of The Distribution Maps A Number in The Domain To A Probability Between 0 and 1 and Then Inverting That FunctionДокумент9 страницComputing The (CDF) F (X) P (X X) of The Distribution Maps A Number in The Domain To A Probability Between 0 and 1 and Then Inverting That FunctionipsitaОценок пока нет
- APM502HTДокумент191 страницаAPM502HTDocRaphОценок пока нет
- Poisson's Equation by The FEM Using A MATLAB Mesh Generator: 4u F U 0 On DДокумент6 страницPoisson's Equation by The FEM Using A MATLAB Mesh Generator: 4u F U 0 On DRuben Dario Guerrero EОценок пока нет
- Problems and Solutions For Partial Differential EquationsДокумент74 страницыProblems and Solutions For Partial Differential EquationsAntonio SaputraОценок пока нет
- CH 12 PDFДокумент31 страницаCH 12 PDFKELOMPOK 1 ANGKATAN 129Оценок пока нет
- Andersson Djehiche - AMO 2011Документ16 страницAndersson Djehiche - AMO 2011artemischen0606Оценок пока нет
- DT DT+ DX: 1.3 First Order Partial Differential EquationsДокумент3 страницыDT DT+ DX: 1.3 First Order Partial Differential EquationsSyed Beeban BashaОценок пока нет
- Introduction To Partial Differential Equations: Tutorial 5Документ5 страницIntroduction To Partial Differential Equations: Tutorial 5Afiq AdnanОценок пока нет
- Math 462: HW2 Solutions: Due On July 25, 2014Документ7 страницMath 462: HW2 Solutions: Due On July 25, 2014mjtbbhrmОценок пока нет
- Time-Continous Stochastic Processes 0. Time Continous Stochastic ProcessesДокумент10 страницTime-Continous Stochastic Processes 0. Time Continous Stochastic ProcessesHuy DuОценок пока нет
- Solving Wave EquationДокумент10 страницSolving Wave Equationdanielpinheiro07Оценок пока нет
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)От EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Оценок пока нет
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)От EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Оценок пока нет
- Measures of CT-HДокумент24 страницыMeasures of CT-HDeepakОценок пока нет
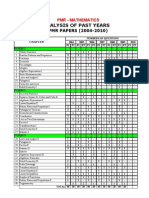
- Analysis of Past Year Questions - Maths PMRДокумент1 страницаAnalysis of Past Year Questions - Maths PMRPatrick ChinОценок пока нет
- Control of Multiple-Input, Multiple-Output ProcessesДокумент38 страницControl of Multiple-Input, Multiple-Output ProcessesdhineshpОценок пока нет
- Time ResponseДокумент22 страницыTime ResponseKenneth Louie LlorenОценок пока нет
- Third Space Learning Paper 3 Mark Scheme (Higher) AQAДокумент8 страницThird Space Learning Paper 3 Mark Scheme (Higher) AQAHannah YeungОценок пока нет
- GATE - 2010 Syllabus: MA-Mathematics PaperДокумент3 страницыGATE - 2010 Syllabus: MA-Mathematics PaperArPaN09121987Оценок пока нет
- Fermats TheoremДокумент17 страницFermats TheoremEswin AngelОценок пока нет
- AMME3500 2013 Assignment 1Документ5 страницAMME3500 2013 Assignment 1JinDownloaderFree92Оценок пока нет
- Iitjee Notes by Dipesh Sir Straight LineДокумент6 страницIitjee Notes by Dipesh Sir Straight LineKakakaunОценок пока нет
- Image Processing Techniques For The Detection and Removal of Cracks in Digitized PaintingsДокумент11 страницImage Processing Techniques For The Detection and Removal of Cracks in Digitized PaintingsShabeer VpkОценок пока нет
- Solution To Problem From Rich and KnightДокумент2 страницыSolution To Problem From Rich and Knightsomi26Оценок пока нет
- Lectures On Communicative AlgebraДокумент64 страницыLectures On Communicative Algebramimi_loveОценок пока нет
- K.M.E.S College of EducationДокумент11 страницK.M.E.S College of EducationNiks DujaniyaОценок пока нет
- Math ReviewerrrrrrrДокумент5 страницMath ReviewerrrrrrrMariel GregoreОценок пока нет
- Sample Mid Term ACIДокумент3 страницыSample Mid Term ACIshipra.luckyОценок пока нет
- The Mathematics of Investment: Research TemplateДокумент12 страницThe Mathematics of Investment: Research TemplateMRX ManОценок пока нет
- Vardhaman Mahaveer Open University, Kota: Differential Geometry and Tensors-1Документ358 страницVardhaman Mahaveer Open University, Kota: Differential Geometry and Tensors-1Rahul NayakОценок пока нет
- Introduction To CommunicationДокумент336 страницIntroduction To CommunicationBethelhem SeifuОценок пока нет
- MidsolДокумент4 страницыMidsolAskhat ZinatОценок пока нет
- EnVision CC G2 10 RTДокумент2 страницыEnVision CC G2 10 RTBelkys DiazОценок пока нет
- New Art March 06Документ16 страницNew Art March 06api-27370939Оценок пока нет
- MMT 4-8 PrepManualДокумент92 страницыMMT 4-8 PrepManualFreddy Reyes FalckОценок пока нет
- Determining A Prony SeriesДокумент26 страницDetermining A Prony SeriesManish RajОценок пока нет