6.
003: Signals and Systems
6.003: Signals and Systems
CT Feedback and Control
Lecture 13
Feedback and Control
March 18, 2010
Feedback: simple, elegant, and robust framework for control.
E
controller
C
plant
S
sensor
We started with robotic driving.
di = desiredFront do = distanceFront March 18, 2010
Feedback and Control
Using feedback to enhance performance. Examples: improve performance of an op amp circuit. control position of a motor. reduce sensitivity to unwanted parameter variation. reduce distortions. stabilize unstable systems magnetic levitation inverted pendulum
Feedback and Control
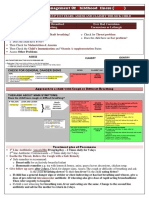
Reducing sensitivity to unwanted parameter variation. Example: power amplier power amplier MP3 player F0 8 < F0 < 12 speaker
Changes in F0 (due to changes in temperature, for example) lead to undesired changes in sound level.
Feedback and Control
Feedback can be used to compensate for parameter variation. power amplier MP3 player X + K F0 8 < F0 < 12 Y speaker
Feedback and Control
Feedback reduces the change in gain due to change in F0 . MP3 player X + 100 F0 8 < F0 < 12
1 10
20 Gain to Speaker F0 (no feedback) 10 8 < F0 < 12 0 0 10 20 F0 100F0 (feedback) 1 + 100F0 10
KF0 H(s) = 1 + KF0 If K is made large, so that KF0 1 H(s) independent of K or F0 ! 1, then
6.003: Signals and Systems
Check Yourself
power amplier MP3 player X + K F0 8 < F0 < 12 Feedback greatly reduces sensitivity to variations in K or F0 . KF0 1 lim H(s) = 1 + KF0 K What about variations in ? Arent those important? Y speaker
Lecture 13
Crossover Distortion
March 18, 2010
Feedback can compensate for parameter variation even when the variation occurs rapidly. Example: using transistors to amplify power. +50V
MP3 player speaker 50V
Crossover Distortion
This circuit introduces crossover distortion. For the upper transistor to conduct, Vi Vo > VT . For the lower transistor to conduct, Vi Vo < VT . +50V Vo
Crossover Distortion
Crossover distortion can have dramatic eects. Example: crossover distortion when the input is Vi (t) = B sin(0 t). +50V Vo (t)
Vi
Vo
VT VT
Vi Vi 50V
Vo
50V
Crossover Distortion
Feedback can reduce the eects of crossover distortion. +50V
Crossover Distortion
As K increases, feedback reduces crossover distortion. +50V Vo (t)
K=4
MP3 player
K Vi speaker 50V
Vo
50V
6.003: Signals and Systems
Crossover Distortion
Demo original no feedback K=2 K=4 K=8 K = 16 original
+50V
Lecture 13
Feedback and Control
Using feedback to enhance performance. Examples:
March 18, 2010
Vi
Vo
50V Vo (t)
improve performance of an op amp circuit. control position of a motor. reduce sensitivity to unwanted parameter variation. reduce distortions. stabilize unstable systems magnetic levitation inverted pendulum
J.S. Bach, Sonata No. 1 in G minor Mvmt. IV. Presto Nathan Milstein, violin
Control of Unstable Systems
Feedback is useful for controlling unstable systems. Example: Magnetic levitation.
Control of Unstable Systems
Magnetic levitation is unstable.
i(t) = io i(t) = io fm (t) y(t) y(t) Mg Equilibrium (y = 0): magnetic force fm (t) is equal to the weight M g. Increase y increased force further increases y. Decrease y decreased force further decreases y. Positive feedback!
Modeling Magnetic Levitation
The magnet generates a force that depends on the distance y(t). i(t) = io fm (t) y(t) Mg
Modeling Magnetic Levitation
The net force accelerates the mass. i(t) = io fm (t) y(t) Mg fm (t) M g = f (t) = M a = M y (t) i(t) = i0 y(t) magnet f (t)
1 M
fm (t)
y(t)
Mg y(t)
6.003: Signals and Systems
Modeling Magnetic Levitation
Over small distances, magnetic force grows linearly with distance. f (t) i(t) = i0 Mg y(t) f (t)
Lecture 13
Levitation with a Spring
March 18, 2010
Relation between force and distance for a spring is opposite in sign. F = K x(t) y(t) = M y (t) x(t)
y(t) f (t)
y(t)
magnet
1 M
y(t) Mg K y(t)
Modeling Magnetic Levitation
Over small distances, magnetic force nearly proportional to distance. f (t) i(t) = i0 Mg K
Block Diagrams
Block diagrams for magnetic levitation and spring/mass are similar. Spring and mass F = K x(t) y(t) = M y (t) x(t) y(t) + K M y (t) A y (t) A y(t)
f (t) Ky(t) y(t) K f (t)
1 M
Magnetic levitation A A y(t) F = Ky(t) = M y (t) x(t) = 0 + + K M y (t) A y (t) A y(t)
Check Yourself
Magnetic Levitation is Unstable
i(t) = io fm (t) y(t) y (t) A y(t) A y(t) f (t) Mg y(t) magnet
1 M
How do the poles of these two systems dier? Spring and mass F = K x(t) y(t) = M y (t) x(t) + K M
Magnetic levitation F = Ky(t) = M y (t) x(t) = 0 + + K M y (t) A y(t) A y(t)
y(t)
6.003: Signals and Systems
Magnetic Levitation
We can stabilize this system by adding an additional feedback loop to control i(t). f (t)
Lecture 13
Stabilizing Magnetic Levitation
March 18, 2010
Stabilize magnetic levitation by controlling the magnet current.
i(t) = io i(t) = 1.1i0 i(t) = i0 Mg i(t) = 0.9i0 Mg i(t) f (t)
1 M
fm (t) y(t)
y(t)
y(t)
magnet
y(t)
Stabilizing Magnetic Levitation
Stabilize magnetic levitation by controlling the magnet current.
Magnetic Levitation
Increasing K2 moves poles toward the origin and then onto j axis. x(t) +
KK2 M
y (t)
i(t) = io fm (t) y(t) Mg fi (t) + fo (t)
1 M
y(t)
y(t)
s-plane
K2 A K But the poles are still marginally stable. A y(t)
Magnetic Levitation
Adding a zero makes the poles stable for suciently large K2 . x(t) +
KK2 M
Inverted Pendulum
As a nal example of stabilizing an unstable system, consider an inverted pendulum. d2 x(t) dt2
(s + z0 )
y (t)
y(t)
y(t) (t) m mg x(t)
(t) l mg
s-plane
lab frame (inertial)
cart frame (non-inertial)
d2 (t) d2 x(t) mg l l ml2 dt2 = sin (t) m dt2 cos (t)
I force distance
Try it: Demo [designed by Prof. James Roberge].
force
distance
6.003: Signals and Systems
Check Yourself: Inverted Pendulum
Lecture 13
Inverted Pendulum
March 18, 2010
This unstable system can be stablized with feedback. Where are the poles of this system? d2 x(t) dt2
(t) l mg x(t)
d2 x(t) dt2
(t) (t) l mg l mg x(t)
(t) l mg
ml2
d2 (t) d2 x(t) = mgl sin (t) m l cos (t) dt2 dt2
Try it. Demo. [originally designed by Marcel Gaudreau]
Feedback and Control
Using feedback to enhance performance. Examples: improve performance of an op amp circuit. control position of a motor. reduce sensitivity to unwanted parameter variation. reduce distortions. stabilize unstable systems magnetic levitation inverted pendulum
MIT OpenCourseWare http://ocw.mit.edu
6.003 Signals and Systems
Spring 2010
For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Joseph Conrad - Heart of DarknessДокумент86 страницJoseph Conrad - Heart of DarknessCaztor SscОценок пока нет
- B.Pharm - Semester - III-10.07.2018Документ16 страницB.Pharm - Semester - III-10.07.2018SAYAN BOSEОценок пока нет
- Chapter 5, Abdominal TraumaДокумент41 страницаChapter 5, Abdominal TraumaRandy HarrisОценок пока нет
- ReagentsДокумент12 страницReagentsKimscey Yvan DZ SulitОценок пока нет
- Part 3-Chap 2 - Classification of Buildings Based On OccupanciesДокумент60 страницPart 3-Chap 2 - Classification of Buildings Based On Occupanciesfaruque65Оценок пока нет
- Water Reuse RoundtableДокумент10 страницWater Reuse RoundtableajiiithОценок пока нет
- Camouflage Lesson PlanДокумент4 страницыCamouflage Lesson Planapi-344569443Оценок пока нет
- EndressHauser HART CommunicatorДокумент1 страницаEndressHauser HART CommunicatorGhafur AgusОценок пока нет
- Titan GelДокумент6 страницTitan GelVladi Salas100% (1)
- IMCI UpdatedДокумент5 страницIMCI UpdatedMalak RagehОценок пока нет
- T 1246784488 17108574 Street Lighting Control Based On LonWorks Power Line CommunicationДокумент3 страницыT 1246784488 17108574 Street Lighting Control Based On LonWorks Power Line CommunicationsryogaaОценок пока нет
- Activity - Alien DNA - CompleteДокумент36 страницActivity - Alien DNA - CompleteJennifer ShawkiОценок пока нет
- Digital ElectronicsДокумент18 страницDigital ElectronicsHarry BeggyОценок пока нет
- Moldex Realty, Inc. (Linda Agustin) 2.0 (With Sound)Документ111 страницMoldex Realty, Inc. (Linda Agustin) 2.0 (With Sound)Arwin AgustinОценок пока нет
- Vegetable Rates - 02-01-2021Документ454 страницыVegetable Rates - 02-01-2021Saurabh RajputОценок пока нет
- Curso VII Lectura 2. New Rural Social MovementsДокумент12 страницCurso VII Lectura 2. New Rural Social MovementsFausto Inzunza100% (1)
- 6.003 Homework #12 Solutions: ProblemsДокумент9 страниц6.003 Homework #12 Solutions: ProblemsSamu PacurucuОценок пока нет
- International Travel Insurance Policy: PreambleДокумент20 страницInternational Travel Insurance Policy: Preamblethakurankit212Оценок пока нет
- Mechanism Design: A SeriesДокумент3 страницыMechanism Design: A Seriesamirmasood kholojiniОценок пока нет
- Barium SulphateДокумент11 страницBarium SulphateGovindanayagi PattabiramanОценок пока нет
- Faithgirlz Handbook, Updated and ExpandedДокумент15 страницFaithgirlz Handbook, Updated and ExpandedFaithgirlz75% (4)
- (ARTICLE) Misguided in Understanding The Term Open MindedДокумент8 страниц(ARTICLE) Misguided in Understanding The Term Open MindedMuhammad Rafeli FakhlipiОценок пока нет
- Hyundai Forklift Catalog PTASДокумент15 страницHyundai Forklift Catalog PTASjack comboОценок пока нет
- Campa Cola - WikipediaДокумент10 страницCampa Cola - WikipediaPradeep KumarОценок пока нет
- Greek ArchitectureДокумент16 страницGreek ArchitectureXlyth RodriguezОценок пока нет
- Muharem Bazdulj - The Second Book (Writings From An Unbound Europe) - Northwestern University Press (2005) PDFДокумент154 страницыMuharem Bazdulj - The Second Book (Writings From An Unbound Europe) - Northwestern University Press (2005) PDFjeff tehОценок пока нет
- Farmhouse Style Plans - Farm & CountryДокумент6 страницFarmhouse Style Plans - Farm & Countryhanif azriОценок пока нет
- Penetration Test & Softening PointДокумент7 страницPenetration Test & Softening PointAli M. Chehadeh100% (4)
- 1704 Broschuere Metal-Coating en EinzelseitenДокумент8 страниц1704 Broschuere Metal-Coating en EinzelseiteninterponОценок пока нет
- Quality Traits in Cultivated Mushrooms and Consumer AcceptabilityДокумент40 страницQuality Traits in Cultivated Mushrooms and Consumer AcceptabilityShivendra SinghОценок пока нет