Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Curry PowderДокумент8 страницCurry PowderMahendar Vanam100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- 14 Business Ideas For 2020 MillionairesДокумент51 страница14 Business Ideas For 2020 MillionairesAbu UmarОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Amazon VS WalmartДокумент5 страницAmazon VS WalmartBrandy M. Twilley100% (1)
- Risk Response PlanДокумент8 страницRisk Response Planapi-639207174Оценок пока нет
- Weather Prediction Using Machine Learning TechniquessДокумент53 страницыWeather Prediction Using Machine Learning Techniquessbakiz89Оценок пока нет
- ShogunДокумент82 страницыShogunvictorz820050% (4)
- Ge MCCBДокумент124 страницыGe MCCBAbu UmarОценок пока нет
- Auditing Theory Auditing in A Computer Information Systems (Cis) EnvironmentДокумент32 страницыAuditing Theory Auditing in A Computer Information Systems (Cis) EnvironmentMajoy BantocОценок пока нет
- Pmbok Guide 6th Edition Process Group Knowledge Area EditДокумент1 страницаPmbok Guide 6th Edition Process Group Knowledge Area EditHaimwant Dhanie0% (1)
- Cable Sizing CalculationДокумент1 страницаCable Sizing CalculationKishore Krishna100% (1)
- TOPIC 2 - Fans, Blowers and Air CompressorДокумент69 страницTOPIC 2 - Fans, Blowers and Air CompressorCllyan ReyesОценок пока нет
- Control TheoryДокумент24 страницыControl TheoryFatoom HashimОценок пока нет
- 1 Page Seo Your Resume TemplateДокумент8 страниц1 Page Seo Your Resume TemplateAbu UmarОценок пока нет
- Capital SAR 5,000,000 Fully Paid C.R. No. 2051002660 P.O. Box 31770 Al Khobar 31952 Kingdom of Saudi Arabia Tel.: (+966) 13 882 8737 Fax: (+966) 13 882 4131Документ8 страницCapital SAR 5,000,000 Fully Paid C.R. No. 2051002660 P.O. Box 31770 Al Khobar 31952 Kingdom of Saudi Arabia Tel.: (+966) 13 882 8737 Fax: (+966) 13 882 4131Abu UmarОценок пока нет
- 1 Page Seo Your Resume TemplateДокумент8 страниц1 Page Seo Your Resume TemplateAbu UmarОценок пока нет
- Control Theory PDFДокумент24 страницыControl Theory PDFAbu UmarОценок пока нет
- Neeco Price ListДокумент1 страницаNeeco Price ListAbu UmarОценок пока нет
- Taxes: All Prices Are Exclusive of VAT or Any Other Taxes As Applicable by The Government AuthorityДокумент1 страницаTaxes: All Prices Are Exclusive of VAT or Any Other Taxes As Applicable by The Government AuthorityAbu UmarОценок пока нет
- Bupa Offer - English PDFДокумент1 страницаBupa Offer - English PDFAbu UmarОценок пока нет
- Valves PricelistДокумент1 страницаValves PricelistAbu UmarОценок пока нет
- Project Manager, PMP® With 8yrs Exp. UpdatedДокумент3 страницыProject Manager, PMP® With 8yrs Exp. UpdatedAbu UmarОценок пока нет
- Technical ExperienceДокумент3 страницыTechnical ExperienceAbu UmarОценок пока нет
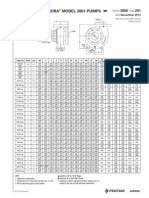
- Series 3800 Dimensional DataДокумент18 страницSeries 3800 Dimensional DataAbu UmarОценок пока нет
- PROMECH PresentationДокумент38 страницPROMECH PresentationAbu UmarОценок пока нет
- List of MachinesДокумент2 страницыList of MachinesAbu UmarОценок пока нет
- Pm01988 Ge WG 5 1-8'' 10k SSV - Phase IДокумент2 страницыPm01988 Ge WG 5 1-8'' 10k SSV - Phase IAbu UmarОценок пока нет
- BOQ ExampleДокумент23 страницыBOQ ExampleAbu UmarОценок пока нет
- Technical ExperienceДокумент3 страницыTechnical ExperienceAbu UmarОценок пока нет
- Amir Jawed Siddique: Building#6, Behind Marriott Hotel, Hail-Wazarat, Riyadh KSA-11464Документ2 страницыAmir Jawed Siddique: Building#6, Behind Marriott Hotel, Hail-Wazarat, Riyadh KSA-11464Abu UmarОценок пока нет
- Introducing Al Kawn Al Saudi Corp.: As Electrical Material SupplierДокумент3 страницыIntroducing Al Kawn Al Saudi Corp.: As Electrical Material SupplierAbu UmarОценок пока нет
- Prince of IndiaДокумент50 страницPrince of IndiaAbu UmarОценок пока нет
- W22 Motors PresentationДокумент24 страницыW22 Motors PresentationAbu UmarОценок пока нет
- Re-Examining Maxmin Protocols: A Fundamental Study On Convergence, Complexity, Variations, and PerformanceДокумент8 страницRe-Examining Maxmin Protocols: A Fundamental Study On Convergence, Complexity, Variations, and PerformanceAbu UmarОценок пока нет
- Efficient Routing Table: Lookup SchemeДокумент6 страницEfficient Routing Table: Lookup SchemeAbu UmarОценок пока нет
- Building Management System PDFДокумент5 страницBuilding Management System PDFJagjit SinghОценок пока нет
- Dokumen - Tips - Dominick Salvatore Microeconomics Wwwpdfsdocuments2comd38dominick SalvatorepdfДокумент2 страницыDokumen - Tips - Dominick Salvatore Microeconomics Wwwpdfsdocuments2comd38dominick SalvatorepdfIshan SharmaОценок пока нет
- Important Instructions For Winter-2020 MCQ Based Online ExaminationДокумент1 страницаImportant Instructions For Winter-2020 MCQ Based Online Examinationdenoh32751Оценок пока нет
- Ethernet: Outline Multiple Access and Ethernet Intro Ethernet Framing CSMA/CD Protocol Exponential BackoffДокумент25 страницEthernet: Outline Multiple Access and Ethernet Intro Ethernet Framing CSMA/CD Protocol Exponential BackoffcheckОценок пока нет
- Directorate of Indian Medicines & Homoeopathy, Orissa, Bhubaneswar Listof The Homoeopathic Dispensaries BhadrakДокумент1 страницаDirectorate of Indian Medicines & Homoeopathy, Orissa, Bhubaneswar Listof The Homoeopathic Dispensaries Bhadrakbiswajit mathematicsОценок пока нет
- Claudia Maienborn, Semantics, 381Документ34 страницыClaudia Maienborn, Semantics, 381robert guimaraesОценок пока нет
- Poster PresentationДокумент3 страницыPoster PresentationNipun RavalОценок пока нет
- Bridging The Divide Between Saas and Enterprise Datacenters: An Oracle White Paper Feb 2010Документ18 страницBridging The Divide Between Saas and Enterprise Datacenters: An Oracle White Paper Feb 2010Danno NОценок пока нет
- MODULE 8. Ceiling WorksДокумент2 страницыMODULE 8. Ceiling WorksAj MacalinaoОценок пока нет
- RA-035659 - CIVIL ENGINEER - Cebu - 5-2022Документ157 страницRA-035659 - CIVIL ENGINEER - Cebu - 5-2022Ash AlbainОценок пока нет
- Limited Alembic: Employee Related DataДокумент4 страницыLimited Alembic: Employee Related DataTp EarningsОценок пока нет
- Blank Freeway Walls Replaced With Local Designs - Press EnterpriseДокумент5 страницBlank Freeway Walls Replaced With Local Designs - Press EnterpriseEmmanuel Cuauhtémoc Ramos BarajasОценок пока нет
- Centric WhitepaperДокумент25 страницCentric WhitepaperFadhil ArsadОценок пока нет
- Kübra Şendoğan CVДокумент5 страницKübra Şendoğan CVKübra ŞendoğanОценок пока нет
- Artificial Intelligence and Expert Systems: Management Information Systems, 4 EditionДокумент27 страницArtificial Intelligence and Expert Systems: Management Information Systems, 4 Editionabhi7219Оценок пока нет
- Fisker Karma - Battery 12V Jump StartДокумент2 страницыFisker Karma - Battery 12V Jump StartRedacTHORОценок пока нет
- Instruction Manual Il-Obct-R1: Slip-Over Current Transformer ObctДокумент2 страницыInstruction Manual Il-Obct-R1: Slip-Over Current Transformer Obctبوحميدة كمالОценок пока нет
- Review Test 1: Circle The Correct Answers. / 5Документ4 страницыReview Test 1: Circle The Correct Answers. / 5XeniaОценок пока нет
- Heart Attack Detection ReportДокумент67 страницHeart Attack Detection ReportAkhil TejaОценок пока нет
- Nurses Guide To Family Assessment and InterventionДокумент9 страницNurses Guide To Family Assessment and InterventionKaye CorОценок пока нет
- Aa DistriДокумент3 страницыAa Distriakosiminda143Оценок пока нет
- Thesis Statement On Lionel MessiДокумент4 страницыThesis Statement On Lionel Messidwham6h1100% (2)
- Dial 1298 For Ambulance - HSBCДокумент22 страницыDial 1298 For Ambulance - HSBCDial1298forAmbulanceОценок пока нет
- Green ChemistryДокумент17 страницGreen ChemistryAaditya RamanОценок пока нет
- Paper 11-ICOSubmittedДокумент10 страницPaper 11-ICOSubmittedNhat Tan MaiОценок пока нет