Вам также может понравиться
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGОт EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGОценок пока нет
- Pid Controller: Ashok.S 500017496 M.Tech Pde R670211016Документ40 страницPid Controller: Ashok.S 500017496 M.Tech Pde R670211016Ashik Jacob Oommen100% (1)
- Process Control: Designing Process and Control Systems For Dynamic PerformanceДокумент42 страницыProcess Control: Designing Process and Control Systems For Dynamic PerformanceMercy JohnОценок пока нет
- Chap 15 Marlin 2002Документ49 страницChap 15 Marlin 2002Audrey Patrick KallaОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- CH 16 (1-27-05) PDFДокумент29 страницCH 16 (1-27-05) PDFDavid AlexanderОценок пока нет
- Projects With Microcontrollers And PICCОт EverandProjects With Microcontrollers And PICCРейтинг: 5 из 5 звезд5/5 (1)
- CH 16 (1-27-05)Документ29 страницCH 16 (1-27-05)David AlexanderОценок пока нет
- ExercisesДокумент18 страницExercisescetec1234Оценок пока нет
- Digital Pid Controller Using Microcontroller: Nishant Mishra 02913204914 EEEДокумент37 страницDigital Pid Controller Using Microcontroller: Nishant Mishra 02913204914 EEENishant MishraОценок пока нет
- Ansoft Simplorer: Model Derivation and Control Design of A Buck Converter UsingДокумент25 страницAnsoft Simplorer: Model Derivation and Control Design of A Buck Converter Usingc_u_r_s_e_dОценок пока нет
- Chap 08 Marlin 2002Документ37 страницChap 08 Marlin 2002Audrey Patrick KallaОценок пока нет
- Chapter 7 - Feedback ControllersДокумент44 страницыChapter 7 - Feedback ControllersPravin Nair50% (2)
- Root Locus DesignДокумент10 страницRoot Locus DesignirosenofОценок пока нет
- Aircraft Pitch - G1 ReportДокумент79 страницAircraft Pitch - G1 ReportTrabajo AviaciónОценок пока нет
- Process ControlДокумент26 страницProcess ControlMeenaОценок пока нет
- Simo MisoДокумент13 страницSimo MisoAndres RodriguezОценок пока нет
- PID ControlДокумент56 страницPID ControlSyafRizal100% (1)
- Pid-Applied Control Systems (Proportional Plus Integral Plus Derivative Control)Документ28 страницPid-Applied Control Systems (Proportional Plus Integral Plus Derivative Control)hiltoneng100% (1)
- Pid TuningДокумент19 страницPid TuningAsuh Rifqi Prihandana100% (1)
- Feedback Controller TuningДокумент23 страницыFeedback Controller Tuningso cool100% (1)
- Proportional-Integral-Derivative (PID) Control: Velocity ResponseДокумент34 страницыProportional-Integral-Derivative (PID) Control: Velocity ResponseFadi AlbatshОценок пока нет
- Advanced Control StrategiesДокумент27 страницAdvanced Control StrategiesmanueldidyОценок пока нет
- Lect. 17 Che 185 - Pid ControlДокумент36 страницLect. 17 Che 185 - Pid ControlAhmad Adel El TantawyОценок пока нет
- Chap 07 Marlin 2002Документ32 страницыChap 07 Marlin 2002Audrey Patrick KallaОценок пока нет
- 15.el Algoritmo de Control PIDДокумент44 страницы15.el Algoritmo de Control PIDYulieth BravoОценок пока нет
- Traditional Advanced Control StrategiesДокумент48 страницTraditional Advanced Control Strategiescape iipeОценок пока нет
- Controller PrincipleДокумент24 страницыController PrinciplePortia ShilengeОценок пока нет
- Advanced Control Seborg Chapter 15 16Документ43 страницыAdvanced Control Seborg Chapter 15 16Akhil Tiwari0% (1)
- PDC Chapter 8Документ49 страницPDC Chapter 8satya sagarОценок пока нет
- Centum VP 5 ENG Control Pgms - GlobalДокумент36 страницCentum VP 5 ENG Control Pgms - GlobalNikhilesh Muraleedharan100% (2)
- Basic Con Trol Act Ions AND Controll ERS: By: Yatendra KumarДокумент82 страницыBasic Con Trol Act Ions AND Controll ERS: By: Yatendra KumarNavdeepОценок пока нет
- Feedback Control PID Control: HadiyantoДокумент64 страницыFeedback Control PID Control: HadiyantoNuzul RamadhaniОценок пока нет
- Automation Exam Formula SheetДокумент10 страницAutomation Exam Formula SheetRobert LoweОценок пока нет
- Assignment 2 - Adv CTL 2020Документ7 страницAssignment 2 - Adv CTL 2020Thành Trung Nguyễn QuáchОценок пока нет
- Control of Continuous Process: Lecturer: Dr. Shallon StubbsДокумент32 страницыControl of Continuous Process: Lecturer: Dr. Shallon StubbsLuther King Ferguson100% (1)
- SOPDTДокумент31 страницаSOPDTAldiansyah NofaОценок пока нет
- Control StrategyДокумент44 страницыControl StrategyAyunie FazlinОценок пока нет
- Cascade ControlДокумент38 страницCascade ControlSun LwinОценок пока нет
- Automatic Voltage RegulatorsДокумент35 страницAutomatic Voltage RegulatorsAlejandroHerreraGurideChileОценок пока нет
- Pid Controls PLC EnvironДокумент22 страницыPid Controls PLC EnvironAbhinav GuptaОценок пока нет
- 6 - Tuning and Control SchemesДокумент34 страницы6 - Tuning and Control SchemesZahidОценок пока нет
- Control Tutorials For MATLAB and Simulink - Introduction - PID Controller DesignДокумент15 страницControl Tutorials For MATLAB and Simulink - Introduction - PID Controller DesignSengottu VelusamyОценок пока нет
- Workshop#10 Report - Cascade Control of Jacketed Reactor - Roy - StewartДокумент14 страницWorkshop#10 Report - Cascade Control of Jacketed Reactor - Roy - Stewartdevbones18Оценок пока нет
- Unit-3 PDCДокумент59 страницUnit-3 PDCNirmal Kumar PandeyОценок пока нет
- Task2 1 Specific Training-EnДокумент35 страницTask2 1 Specific Training-EnSantiago LarrazОценок пока нет
- PID Control - Simple Tuning Methods: Ulf HolmbergДокумент39 страницPID Control - Simple Tuning Methods: Ulf HolmbergSan BanОценок пока нет
- Control Chapter07 - GearTeamДокумент71 страницаControl Chapter07 - GearTeamNabilaSalsaОценок пока нет
- Ingeniería Automotriz: Teoria de ControlДокумент25 страницIngeniería Automotriz: Teoria de ControlPablo SandovalОценок пока нет
- PID Control Tuning Methods and Intro To NonlinearДокумент36 страницPID Control Tuning Methods and Intro To NonlinearKuanysh YessenzhanovОценок пока нет
- 3P04 Tutorial 7 SingleLoop 2008Документ19 страниц3P04 Tutorial 7 SingleLoop 2008Khaled KamalОценок пока нет
- CHE3162.Lecture8 Feedback PIDДокумент33 страницыCHE3162.Lecture8 Feedback PIDPhan NeeОценок пока нет
- Cascade ControlДокумент17 страницCascade Controlمحمد سلامОценок пока нет
- Prepared By: United Arab Emirates University College of Engineering Electrical Engineering DepartmentДокумент87 страницPrepared By: United Arab Emirates University College of Engineering Electrical Engineering DepartmentpadmajasivaОценок пока нет
- Introduction: PID Controller Design: SystemДокумент14 страницIntroduction: PID Controller Design: SystemRantharu AttanayakeОценок пока нет
- Starting: Chapter 7: PID ControlДокумент13 страницStarting: Chapter 7: PID ControlKishodarran Rajendran KicchoОценок пока нет
- 13 Cascade ControlДокумент39 страниц13 Cascade ControlMansour AbdulazizОценок пока нет
- 5 StereoisomersДокумент37 страниц5 StereoisomersAudrey Patrick KallaОценок пока нет
- AbsorptionStripping PDFДокумент25 страницAbsorptionStripping PDFJuan Camilo HenaoОценок пока нет
- Safety and Security Emergency Plan For EVENTДокумент11 страницSafety and Security Emergency Plan For EVENTAudrey Patrick KallaОценок пока нет
- Chapter 1 - Process DiagramsДокумент36 страницChapter 1 - Process Diagramsmrajim93Оценок пока нет
- .Cost EstimationДокумент15 страниц.Cost EstimationAudrey Patrick KallaОценок пока нет
- Chemical Process DesignДокумент93 страницыChemical Process DesignAudrey Patrick Kalla50% (2)
- Unit Operations and Processes in Environmental EngineeringДокумент815 страницUnit Operations and Processes in Environmental EngineeringAudrey Patrick Kalla89% (28)
- Ammonia StorageДокумент6 страницAmmonia Storagemsathishkm3911Оценок пока нет
- Ads or PtionДокумент141 страницаAds or PtionAudrey Patrick KallaОценок пока нет
- Absorption ColumnsДокумент55 страницAbsorption ColumnsAudrey Patrick KallaОценок пока нет
- Chapter 10 - QДокумент32 страницыChapter 10 - Qmohammedakbar88Оценок пока нет
- EiaДокумент16 страницEiaAudrey Patrick KallaОценок пока нет
- Paint Production Process DiagramДокумент4 страницыPaint Production Process DiagramQasim SarwarОценок пока нет
- Heat ExchangerДокумент16 страницHeat ExchangerAudrey Patrick KallaОценок пока нет
- Aerosol Paints Know How Plant Setting FormulationsДокумент1 страницаAerosol Paints Know How Plant Setting FormulationsAudrey Patrick Kalla67% (3)
- Magnetic Fields: PHYS102 Previous Exam ProblemsДокумент11 страницMagnetic Fields: PHYS102 Previous Exam ProblemsAudrey Patrick KallaОценок пока нет
- 09.electromagntic and Faraday Law - InductionДокумент53 страницы09.electromagntic and Faraday Law - InductionAudrey Patrick KallaОценок пока нет
- Paint and Coating ProcessesДокумент65 страницPaint and Coating ProcessesAudrey Patrick Kalla100% (1)
- 84 enДокумент6 страниц84 enNomaan AsimОценок пока нет
- Paint Testing ChartДокумент39 страницPaint Testing ChartAudrey Patrick Kalla0% (1)
- DRAFT CIOB Code of Quality ManagementДокумент98 страницDRAFT CIOB Code of Quality ManagementKeith Cubero100% (1)
- 001-0001-12 Quality System ManualДокумент12 страниц001-0001-12 Quality System ManualPramod AthiyarathuОценок пока нет
- BTS3900&BTS5900 V100R013C00SPC150 NodeBFunction Performance Counter Reference PDFДокумент762 страницыBTS3900&BTS5900 V100R013C00SPC150 NodeBFunction Performance Counter Reference PDFSwandito HaryoyudantoОценок пока нет
- How Do I Coordinate DesignДокумент8 страницHow Do I Coordinate DesignjvwzyxktuvnjohdkbjОценок пока нет
- Standardization Uv Flexo ManualДокумент73 страницыStandardization Uv Flexo ManualMilos Papic100% (3)
- Bakso - Wikipedia, The Free EncyclopediaДокумент3 страницыBakso - Wikipedia, The Free EncyclopediaTyas Te PyОценок пока нет
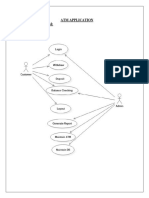
- Atm Application Use Case DiagramДокумент58 страницAtm Application Use Case DiagramS. Mohd TharikОценок пока нет
- Lifefitness Produktkatalog 2020Документ43 страницыLifefitness Produktkatalog 2020Gabriel SilvaОценок пока нет
- Course of Study - Högskolan I GävleДокумент1 страницаCourse of Study - Högskolan I GävlekamranОценок пока нет
- 08-Regulations Governing Business Trip A..ty - Higher School of EconomicsДокумент13 страниц08-Regulations Governing Business Trip A..ty - Higher School of EconomicsCha Icha NathaОценок пока нет
- Edmund John Balboa Bsa: Let's CheckДокумент3 страницыEdmund John Balboa Bsa: Let's CheckEj MacadatuОценок пока нет
- Uppercase Letter TracingДокумент27 страницUppercase Letter TracingElvis AungОценок пока нет
- Six Principles of Finance ManagementДокумент5 страницSix Principles of Finance ManagementAqib javed100% (1)
- Chat Summarization and Sentiment Analysis Techniques in Data MiningДокумент5 страницChat Summarization and Sentiment Analysis Techniques in Data MiningPersoAccoОценок пока нет
- الحلل السندسية في الأخبار التونسيةДокумент381 страницаالحلل السندسية في الأخبار التونسيةchohra khaledОценок пока нет
- Cereals and Pasta CookeryДокумент48 страницCereals and Pasta CookeryJoshua Guiriña100% (3)
- Class 10 AI NOTES CHAPTER 1Документ7 страницClass 10 AI NOTES CHAPTER 1Vinayak Chaturvedi100% (4)
- Theory of Structures - IiДокумент4 страницыTheory of Structures - IiAjmal MuhammedОценок пока нет
- Create RDP Using Digital OceanДокумент3 страницыCreate RDP Using Digital OceanZay Min HtetОценок пока нет
- B - 01 - TDD-LTE Protocol and InterfaceДокумент31 страницаB - 01 - TDD-LTE Protocol and Interfaceaslam_326580186Оценок пока нет
- Shantae ManualДокумент19 страницShantae ManualJonathan Lesomthing100% (1)
- YEF Final ReportДокумент12 страницYEF Final ReportNidhi SharmaОценок пока нет
- Financial Performance of State Bank of India: Dr.G. KanagavalliДокумент13 страницFinancial Performance of State Bank of India: Dr.G. KanagavalliANKIT GUPTAОценок пока нет
- LDRRMP - Vi Monitoring and EvaluationДокумент19 страницLDRRMP - Vi Monitoring and EvaluationMohrein H. Ismael VI100% (1)
- Bearing Phase OutДокумент12 страницBearing Phase OutAndrés UguñaОценок пока нет
- Tawitawi Public ConsultationДокумент5 страницTawitawi Public ConsultationbpdmacapendegОценок пока нет
- Ortiz, Domingo, Cachero, Tabio - Exp 8 - Fluids in MotionДокумент4 страницыOrtiz, Domingo, Cachero, Tabio - Exp 8 - Fluids in Motionortiz.kylleОценок пока нет
- Doc13 PDFДокумент6 страницDoc13 PDFBladeОценок пока нет
- Karlos KarlinaДокумент2 страницыKarlos KarlinaTip RendahОценок пока нет
- Topic: A Study On Awareness and Accessing Behavior Of: DEMAT Account in Rajpipla CityДокумент19 страницTopic: A Study On Awareness and Accessing Behavior Of: DEMAT Account in Rajpipla CityBhavesh VasavaОценок пока нет
- You Can't Joke About That: Why Everything Is Funny, Nothing Is Sacred, and We're All in This TogetherОт EverandYou Can't Joke About That: Why Everything Is Funny, Nothing Is Sacred, and We're All in This TogetherОценок пока нет
- The Importance of Being Earnest: Classic Tales EditionОт EverandThe Importance of Being Earnest: Classic Tales EditionРейтинг: 4.5 из 5 звезд4.5/5 (44)
- A**holeology The Cheat Sheet: Put the science into practice in everyday situationsОт EverandA**holeology The Cheat Sheet: Put the science into practice in everyday situationsРейтинг: 3.5 из 5 звезд3.5/5 (3)
- The House at Pooh Corner - Winnie-the-Pooh Book #4 - UnabridgedОт EverandThe House at Pooh Corner - Winnie-the-Pooh Book #4 - UnabridgedРейтинг: 4.5 из 5 звезд4.5/5 (5)
- 1,001 Facts that Will Scare the S#*t Out of You: The Ultimate Bathroom ReaderОт Everand1,001 Facts that Will Scare the S#*t Out of You: The Ultimate Bathroom ReaderРейтинг: 3.5 из 5 звезд3.5/5 (48)
- The Book of Bad:: Stuff You Should Know Unless You’re a PussyОт EverandThe Book of Bad:: Stuff You Should Know Unless You’re a PussyРейтинг: 3.5 из 5 звезд3.5/5 (3)
- Sex, Drugs, and Cocoa Puffs: A Low Culture ManifestoОт EverandSex, Drugs, and Cocoa Puffs: A Low Culture ManifestoРейтинг: 3.5 из 5 звезд3.5/5 (1429)
- The Smartest Book in the World: A Lexicon of Literacy, A Rancorous Reportage, A Concise Curriculum of CoolОт EverandThe Smartest Book in the World: A Lexicon of Literacy, A Rancorous Reportage, A Concise Curriculum of CoolРейтинг: 4 из 5 звезд4/5 (14)
- Sorry I'm Late, I Didn't Want to Come: One Introvert's Year of Saying YesОт EverandSorry I'm Late, I Didn't Want to Come: One Introvert's Year of Saying YesРейтинг: 4.5 из 5 звезд4.5/5 (400)
- The Asshole Survival Guide: How to Deal with People Who Treat You Like DirtОт EverandThe Asshole Survival Guide: How to Deal with People Who Treat You Like DirtРейтинг: 4 из 5 звезд4/5 (60)