Вам также может понравиться
- EX Parcial 2013-1 SubrayadoДокумент4 страницыEX Parcial 2013-1 SubrayadoLuisОценок пока нет
- Sesion de Aprendizaje SecundariaДокумент17 страницSesion de Aprendizaje SecundariaFredMontalvoОценок пока нет
- Cap. 6 Número ComplejosДокумент2 страницыCap. 6 Número ComplejosLuisОценок пока нет
- Intro Ing 1.1Документ4 страницыIntro Ing 1.1LuisОценок пока нет
- Exponentes IIДокумент2 страницыExponentes IILuisОценок пока нет
- Trigonometria Elemental IV BimestreДокумент90 страницTrigonometria Elemental IV BimestreLuis100% (1)
- Series Numeric AsДокумент29 страницSeries Numeric AsCarlos MendezОценок пока нет
- EP - MB - 2013-2 SolucionДокумент3 страницыEP - MB - 2013-2 SolucionLuisОценок пока нет
- MA256 S10 DC3 REC1 Repaso PREGДокумент3 страницыMA256 S10 DC3 REC1 Repaso PREGLuisОценок пока нет
- Valores y Vectores PropiosДокумент4 страницыValores y Vectores PropiosLuisОценок пока нет
- Ep MB 2014-0Документ4 страницыEp MB 2014-0LuisОценок пока нет
- Coleccion Problemas Tema 3Документ2 страницыColeccion Problemas Tema 3LuisОценок пока нет
- EX Parcial 2013-1 SubrayadoДокумент4 страницыEX Parcial 2013-1 SubrayadoLuisОценок пока нет
- 03 Ejercicios de Entropía y Segunda Ley de La TermodinámicaДокумент5 страниц03 Ejercicios de Entropía y Segunda Ley de La TermodinámicaLuisОценок пока нет
- Guia 3Документ4 страницыGuia 3LuisОценок пока нет
- Unidad 4 ED ALДокумент46 страницUnidad 4 ED ALLuisОценок пока нет
- Unidad 5 ED ALДокумент38 страницUnidad 5 ED ALLuisОценок пока нет
- Guia 4Документ4 страницыGuia 4LuisОценок пока нет
- Gui A 5Документ5 страницGui A 5MCk EyОценок пока нет
- Practica 1Документ2 страницыPractica 1Fernando JordanОценок пока нет
- Guia 2Документ2 страницыGuia 2LuisОценок пока нет
- Guia 1Документ5 страницGuia 1LuisОценок пока нет
- 2Документ16 страниц2juan-dobleОценок пока нет
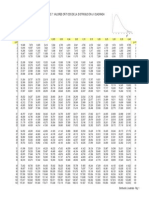
- Tabla Chi CuadradoДокумент2 страницыTabla Chi CuadradoSariah Salas QuispeОценок пока нет
- Guia 4Документ4 страницыGuia 4LuisОценок пока нет
- CAPÍTULO 17 - DesigualdadesДокумент3 страницыCAPÍTULO 17 - DesigualdadesLuisОценок пока нет
- CAPÍTULO 4 - Problemas Con Enteros y FraccionesДокумент4 страницыCAPÍTULO 4 - Problemas Con Enteros y FraccionesLuisОценок пока нет
- FactorizaciónДокумент4 страницыFactorizaciónLuisОценок пока нет
- CAPÍTULO 2 - Operaciones Combinadas en QДокумент4 страницыCAPÍTULO 2 - Operaciones Combinadas en QLuisОценок пока нет
- Características de La Escuela Moderna y TradicionalДокумент18 страницCaracterísticas de La Escuela Moderna y TradicionalJosué Ramírez75% (4)
- CERRAMIENTOSДокумент63 страницыCERRAMIENTOSisimoncОценок пока нет
- Notas de UniversidadДокумент1 страницаNotas de UniversidadPierre LopezОценок пока нет
- Algoritmo ARIESДокумент11 страницAlgoritmo ARIESnetfranОценок пока нет
- Cien Años de Modernismo - Padre Dominique BourmaudДокумент275 страницCien Años de Modernismo - Padre Dominique Bourmaudkike_manning100% (4)
- Investigacion de Incidentes y Accidentes UltimoДокумент48 страницInvestigacion de Incidentes y Accidentes Ultimocarmen yudith cahuapaza condoriОценок пока нет
- Direccion de Ventas Francisco Torres PDFДокумент42 страницыDireccion de Ventas Francisco Torres PDFLuis Carlos CalambasОценок пока нет
- Copia de Descriptor de Cargos Sph0tДокумент48 страницCopia de Descriptor de Cargos Sph0tfernando_gabriel_araОценок пока нет
- La Planificación Turística. Enfoques y ModelosДокумент25 страницLa Planificación Turística. Enfoques y Modelos13SCORPIO87Оценок пока нет
- Oribe Yosep Encofrados Metálicos ConstrucciónДокумент95 страницOribe Yosep Encofrados Metálicos ConstrucciónJonathan Torres HОценок пока нет
- La Esencia Del Yoga - Jose Manuel Martinez SanchezДокумент6 страницLa Esencia Del Yoga - Jose Manuel Martinez SanchezJosé Manuel Martínez Sánchez100% (2)
- 2ab55c - Plan de CoДокумент5 страниц2ab55c - Plan de CoProfe Isa CampisiОценок пока нет
- Gandhi Guia de ReflexionДокумент4 страницыGandhi Guia de ReflexionJair García-Guerrero, MD91% (11)
- Tema 5 Apoyo SocialДокумент34 страницыTema 5 Apoyo SocialJhonatan Córdova Pintado100% (1)
- TEXTOSДокумент3 страницыTEXTOSAlejandro LarreaОценок пока нет
- Control de Lectura 2 - Negociacion InternacionalДокумент3 страницыControl de Lectura 2 - Negociacion InternacionalRachel GrunauerОценок пока нет
- Curriculo NacionalДокумент15 страницCurriculo NacionalBranh QuispОценок пока нет
- Semana 25 ActividadДокумент4 страницыSemana 25 ActividadPrudencio AlcantaraОценок пока нет
- Modelo ConductistaДокумент2 страницыModelo ConductistaRosana Perez OrtegaОценок пока нет
- 07 Momento AngularДокумент4 страницы07 Momento AngularOrlando HerradaОценок пока нет
- Sociedades PreestatalesДокумент26 страницSociedades PreestatalesmarecnaОценок пока нет
- Informe Pasantia Empresa SegurosДокумент18 страницInforme Pasantia Empresa Seguroslizangeles1975Оценок пока нет
- Principio de Pascal y ArquimedesДокумент11 страницPrincipio de Pascal y ArquimedesMaycol Vivanco MaytaОценок пока нет
- Presentación General CROPWATДокумент72 страницыPresentación General CROPWATCarlos MestasОценок пока нет
- 3ro MedioДокумент11 страниц3ro MedioA Fernández DyegoОценок пока нет
- Interpretacion de Las Leyes TributariasДокумент11 страницInterpretacion de Las Leyes TributariasViviana María Blanco Velázquez100% (1)
- Programacion Dinamica Deterministica-Parte 1Документ12 страницProgramacion Dinamica Deterministica-Parte 1Jon HermozaОценок пока нет
- RG 3726-15 Recursos de La Seguridad Social-Contribuciones Patronales - Agentes de PercepciónДокумент43 страницыRG 3726-15 Recursos de La Seguridad Social-Contribuciones Patronales - Agentes de PercepciónEstudio Alvarezg AsociadosОценок пока нет
- Aplicación de Las TelecomunicacionesДокумент48 страницAplicación de Las TelecomunicacionesFaustino NitoОценок пока нет
- Los Ambientes de Aprendizaje Del C.E.I (Centro de Educación Inicial) Jardín de Infancia "Bárbula II", Ubicado en El Municipio Naguanagua Del Estado Carabobo.Документ170 страницLos Ambientes de Aprendizaje Del C.E.I (Centro de Educación Inicial) Jardín de Infancia "Bárbula II", Ubicado en El Municipio Naguanagua Del Estado Carabobo.maria jose100% (1)