Вам также может понравиться
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsОт EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsОценок пока нет
- Second Order Linear Equations - A Prelude To Higher Order Linear Equations A Historical ApproachДокумент15 страницSecond Order Linear Equations - A Prelude To Higher Order Linear Equations A Historical ApproachChristian SarmientoОценок пока нет
- Mal 514Документ171 страницаMal 514darelibranОценок пока нет
- Integrating Factor CP 7Документ28 страницIntegrating Factor CP 7Alek Al HadiОценок пока нет
- Differential EquationsДокумент4 страницыDifferential Equationssandhya ganesanОценок пока нет
- MATH219 Lecture 1Документ16 страницMATH219 Lecture 1Harun GölükcüОценок пока нет
- Unit 1Документ20 страницUnit 1Tutul BiswasОценок пока нет
- Differential Equations (WORD)Документ5 страницDifferential Equations (WORD)Veegay Torres KibeteОценок пока нет
- Applications - Diffrnt EqnsДокумент10 страницApplications - Diffrnt Eqnsroshan rojerОценок пока нет
- MA3264CHAP7Документ67 страницMA3264CHAP7Nancy QОценок пока нет
- Differential Equations MATH C241: Class Hours: T TH S 2 (9.00 A.M. To 9.50 A.M.)Документ43 страницыDifferential Equations MATH C241: Class Hours: T TH S 2 (9.00 A.M. To 9.50 A.M.)Siddartha PetetiОценок пока нет
- Stability: Linear SystemsДокумент9 страницStability: Linear SystemsAsim ZulfiqarОценок пока нет
- Finite Element 3Документ23 страницыFinite Element 3Carlos GonzalesОценок пока нет
- In This Lecture We Begin The StudyДокумент12 страницIn This Lecture We Begin The StudyzaidОценок пока нет
- Introduction To DifferentiationДокумент4 страницыIntroduction To DifferentiationShan MajeedОценок пока нет
- Applied Mathematics, Eng Lessons 5& 6Документ5 страницApplied Mathematics, Eng Lessons 5& 6tenisonngwaОценок пока нет
- MathReview 2Документ31 страницаMathReview 2resperadoОценок пока нет
- FAC Sample 2010Документ6 страницFAC Sample 2010aslam844Оценок пока нет
- Ordinary Differential EquationДокумент15 страницOrdinary Differential EquationAli Asad SahuОценок пока нет
- VI. Notes (Played) On The Vibrating StringДокумент20 страницVI. Notes (Played) On The Vibrating Stringjose2017Оценок пока нет
- MA133 NotesДокумент81 страницаMA133 NotesCharlieОценок пока нет
- The Runge-Kutta MethodДокумент9 страницThe Runge-Kutta MethodSlavka JadlovskaОценок пока нет
- Notes PDE Pt1Документ23 страницыNotes PDE Pt1Wati KaОценок пока нет
- Assighnmebt 1 SolДокумент6 страницAssighnmebt 1 SolAyesha KhanОценок пока нет
- Analysis2011 PDFДокумент235 страницAnalysis2011 PDFMirica Mihai AntonioОценок пока нет
- AM1013 Lecture1 DiscussionДокумент32 страницыAM1013 Lecture1 DiscussionvishwahirimuthugodaОценок пока нет
- Diffirential Equation PDFДокумент8 страницDiffirential Equation PDFBhavik ChaudhariОценок пока нет
- Partial DerivativeДокумент71 страницаPartial Derivative9898171006Оценок пока нет
- PDEДокумент39 страницPDEchandra kantОценок пока нет
- L3Документ7 страницL3Maria RoaОценок пока нет
- Variable Coe Cient, Second Order, Linear, Ordinary Differential EquationsДокумент4 страницыVariable Coe Cient, Second Order, Linear, Ordinary Differential EquationsKathiresan ManickamОценок пока нет
- Definition of The Laplace TransformДокумент15 страницDefinition of The Laplace TransformEdgardo De La CruzОценок пока нет
- PdeДокумент110 страницPdeHammadОценок пока нет
- Mechanics Lagrangian and HamilitonianДокумент56 страницMechanics Lagrangian and HamilitonianTrevor Scheopner100% (1)
- Ordinary Differential Equations: Differential Equation. in This Chapter We Shall Consider Methods of Solving OrdinaryДокумент7 страницOrdinary Differential Equations: Differential Equation. in This Chapter We Shall Consider Methods of Solving OrdinaryYogi Firman AndikaОценок пока нет
- Lecture 4C - Substitution MethodsДокумент11 страницLecture 4C - Substitution MethodsChristian SarmientoОценок пока нет
- Differential EquationsДокумент14 страницDifferential EquationsAniqaОценок пока нет
- Lectures 13Документ17 страницLectures 13Omed. HОценок пока нет
- Introduction To Differential Equations: Order of A Differential EquationДокумент4 страницыIntroduction To Differential Equations: Order of A Differential EquationSeif Aldin KhamisОценок пока нет
- Differential EquationsДокумент44 страницыDifferential EquationsSJAIN12Оценок пока нет
- Week 3Документ20 страницWeek 3Venkat KarthikeyaОценок пока нет
- An Introduction To Lagrangian and Hamiltonian Mechanics: Lecture NotesДокумент59 страницAn Introduction To Lagrangian and Hamiltonian Mechanics: Lecture Notesadam_87jktОценок пока нет
- Differential Equations PDFДокумент5 страницDifferential Equations PDF2001divya1959Оценок пока нет
- Chapter 1 - Introduction To Differential EquationsДокумент35 страницChapter 1 - Introduction To Differential EquationsMoh Saleh AminОценок пока нет
- Dynamic Systems Course NotesДокумент8 страницDynamic Systems Course NotesAbhishek KumarОценок пока нет
- MIT18 034s09 Lec0Документ3 страницыMIT18 034s09 Lec0OmarEsparzaОценок пока нет
- MathsДокумент6 страницMathsdareludumОценок пока нет
- M1 - Intro To DE 8 9 PDFДокумент8 страницM1 - Intro To DE 8 9 PDFsubyОценок пока нет
- Ifferential Quations: Class 1: Wednesday September 1Документ4 страницыIfferential Quations: Class 1: Wednesday September 1Alien AnnОценок пока нет
- Symmetry of Stochastic Equations: 1 Projectable SymmetriesДокумент12 страницSymmetry of Stochastic Equations: 1 Projectable Symmetriesk_gh22Оценок пока нет
- De - Chapter 1Документ7 страницDe - Chapter 1May Ann AceraОценок пока нет
- 1.1. Basic Concepts. ModelingДокумент9 страниц1.1. Basic Concepts. ModelingMuhammad Ridho RamadhanОценок пока нет
- Computational Method Problem NewДокумент37 страницComputational Method Problem NewBhavesh PatelОценок пока нет
- Integ Equ Phys571 T131Документ19 страницInteg Equ Phys571 T131raoni_jampaОценок пока нет
- Math 124A Course NotesДокумент36 страницMath 124A Course NotesAmber LandisОценок пока нет
- 44 Diffrential Equations Part 2 of 3Документ14 страниц44 Diffrential Equations Part 2 of 3Vaibhav KumarОценок пока нет
- Differntial Equations ProjectДокумент28 страницDifferntial Equations ProjectSai CharanОценок пока нет
- Difference Equations in Normed Spaces: Stability and OscillationsОт EverandDifference Equations in Normed Spaces: Stability and OscillationsОценок пока нет
- Theorems Involving The Laplace TransformДокумент3 страницыTheorems Involving The Laplace TransformChristian SarmientoОценок пока нет
- The Laplace Transform and Its InverseДокумент17 страницThe Laplace Transform and Its InverseChristian SarmientoОценок пока нет
- The Laplace Transform and Initial Value Problems Part 1Документ7 страницThe Laplace Transform and Initial Value Problems Part 1Christian SarmientoОценок пока нет
- RL and RC CircuitДокумент4 страницыRL and RC CircuitChristian SarmientoОценок пока нет
- Table of Laplace TransformsДокумент1 страницаTable of Laplace TransformsChristian SarmientoОценок пока нет
- The Inverse Laplace Transform Partial Fractions and The First Shifting TheoremДокумент5 страницThe Inverse Laplace Transform Partial Fractions and The First Shifting TheoremChristian SarmientoОценок пока нет
- Qualitative Analysis of Linear Autonomous Systems With Constant CoefficientsДокумент15 страницQualitative Analysis of Linear Autonomous Systems With Constant CoefficientsChristian SarmientoОценок пока нет
- Periodic Functions, The Unit Step Function and The Second Shifting TheoremДокумент21 страницаPeriodic Functions, The Unit Step Function and The Second Shifting TheoremChristian SarmientoОценок пока нет
- Power Series Solutions at Ordinary PointsДокумент14 страницPower Series Solutions at Ordinary PointsChristian SarmientoОценок пока нет
- Problems On Solving Systems With The Eigenvalue MethodДокумент6 страницProblems On Solving Systems With The Eigenvalue MethodChristian SarmientoОценок пока нет
- Non-Homogeneous Equations - Undetermined CoefficientsДокумент20 страницNon-Homogeneous Equations - Undetermined CoefficientsChristian SarmientoОценок пока нет
- Linear Systems - OperatorsДокумент20 страницLinear Systems - OperatorsChristian SarmientoОценок пока нет
- Lecture 8 VibrationsДокумент27 страницLecture 8 VibrationsChristian SarmientoОценок пока нет
- Lecture 2B Autonomous EquationsДокумент7 страницLecture 2B Autonomous EquationsChristian SarmientoОценок пока нет
- Lecture 2A Direction Fields and Integral CurvesДокумент7 страницLecture 2A Direction Fields and Integral CurvesChristian SarmientoОценок пока нет
- Lecture 3 - Separation of VariablesДокумент16 страницLecture 3 - Separation of VariablesChristian SarmientoОценок пока нет
- Lecture 6 - Homogeneous Equations - Constant Coefficients - General CaseДокумент13 страницLecture 6 - Homogeneous Equations - Constant Coefficients - General CaseChristian SarmientoОценок пока нет
- Lecture 4C - Substitution MethodsДокумент11 страницLecture 4C - Substitution MethodsChristian SarmientoОценок пока нет
- Lecture 1B Existence and UniquenessДокумент6 страницLecture 1B Existence and UniquenessChristian SarmientoОценок пока нет
- First Order Linear Equations and Integrating FactorsДокумент16 страницFirst Order Linear Equations and Integrating FactorsChristian SarmientoОценок пока нет
- First Order Linear Equations and Integrating FactorsДокумент11 страницFirst Order Linear Equations and Integrating FactorsChristian SarmientoОценок пока нет
- First Oder Equations-ApplicationsДокумент32 страницыFirst Oder Equations-ApplicationsChristian SarmientoОценок пока нет
- Vectors - The Dot and Cross Products - No TensorsДокумент19 страницVectors - The Dot and Cross Products - No TensorsChristian SarmientoОценок пока нет
- MESL - Differential Equation 1Документ4 страницыMESL - Differential Equation 1Mark-Lorie Duculan NonesОценок пока нет
- Caet Course OutlineДокумент271 страницаCaet Course OutlineSubhashishОценок пока нет
- Zill PPT CH 01Документ21 страницаZill PPT CH 01Kenneth Rodriguez HerminadoОценок пока нет
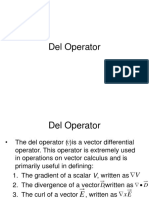
- Del Operator1Документ89 страницDel Operator1KEMPОценок пока нет
- How To Solve The Heat Equation Using Fourier Transforms - WikihowДокумент6 страницHow To Solve The Heat Equation Using Fourier Transforms - Wikihowch Anass sajjad bhattiОценок пока нет
- BSC MathematicsДокумент13 страницBSC MathematicsGanesh TiwariОценок пока нет
- CalculusДокумент42 страницыCalculusRaisulОценок пока нет
- Electronics and Communication Engineering PDFДокумент160 страницElectronics and Communication Engineering PDFsindhu-aravinda9Оценок пока нет
- Understanding of Different Types of Numerical IntegrationДокумент8 страницUnderstanding of Different Types of Numerical IntegrationABCD ABCDОценок пока нет
- B.E. EeeДокумент32 страницыB.E. EeeKRAJ315Оценок пока нет
- Btech Civil SyllabusДокумент44 страницыBtech Civil SyllabusValmik PatelОценок пока нет
- M 2910 HC 3 Su 12Документ3 страницыM 2910 HC 3 Su 12masyuki1979Оценок пока нет
- B E-Cs2016 PDFДокумент154 страницыB E-Cs2016 PDFPoojith MassОценок пока нет
- Math 2280 - Practice Exam 4Документ7 страницMath 2280 - Practice Exam 4Helbert PaatОценок пока нет
- Preface 2023 Advanced Differential EquationsДокумент3 страницыPreface 2023 Advanced Differential EquationsRizwan RzkyОценок пока нет
- Chapter 2 - DifferentiationДокумент42 страницыChapter 2 - DifferentiationIbrahim AdhamОценок пока нет
- B.SC MathematicsДокумент37 страницB.SC MathematicsMarikannan GОценок пока нет
- DIFFYQS PDEs, Separation of Variables, and The Heat EquationДокумент12 страницDIFFYQS PDEs, Separation of Variables, and The Heat EquationLG TVОценок пока нет
- Ch.4 DifferentiationДокумент25 страницCh.4 DifferentiationZanfalawy BashaОценок пока нет
- Syllabus Cse 1-4 (Regulation 2001)Документ50 страницSyllabus Cse 1-4 (Regulation 2001)Jaganathan K93% (28)
- Chapter 3: Laplace Transform: FT FsДокумент29 страницChapter 3: Laplace Transform: FT FsTekdОценок пока нет
- A Chebyshev Spectral Collocation Method For SolvingДокумент18 страницA Chebyshev Spectral Collocation Method For SolvingGiovanniCuocoОценок пока нет
- Differentiable and Analytic FunctionsДокумент11 страницDifferentiable and Analytic FunctionsMelakuОценок пока нет
- Mat565 BVPДокумент12 страницMat565 BVPMuhammad Zaidi MisniОценок пока нет
- Tangent and Normal Questions - 2Документ4 страницыTangent and Normal Questions - 2Redz OneОценок пока нет
- Gauss's TheoremДокумент21 страницаGauss's TheoremKike PaniaguaОценок пока нет
- Properties of Laplace Transform: ExampleДокумент3 страницыProperties of Laplace Transform: ExampleqistinaОценок пока нет
- Units & MeasurementДокумент12 страницUnits & MeasurementPranjal GuptaОценок пока нет
- Module 6 Techniques of Solving First Order First Degree ODE-part4-BDE, SUBST and CL2V-tthДокумент33 страницыModule 6 Techniques of Solving First Order First Degree ODE-part4-BDE, SUBST and CL2V-tthgreg hansОценок пока нет
- Folding in Architecture PDFДокумент40 страницFolding in Architecture PDFGowtham Namachivayan100% (1)