Вам также может понравиться
- 2070Документ45 страниц2070Karolus B Nofri TaeОценок пока нет
- V 15 N 2 P 218Документ12 страницV 15 N 2 P 218Nirmal Kumar PandeyОценок пока нет
- Higher Algebra - Hall & KnightДокумент593 страницыHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Higher Algebra - Hall & KnightДокумент593 страницыHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- Lesson 1-5Документ66 страницLesson 1-5Gian Andrei BenaguaОценок пока нет
- Bollet Point To Lodha LetterДокумент3 страницыBollet Point To Lodha Letterchief engineer CommercialОценок пока нет
- 3m Filtrete Fap 04 SeriesДокумент10 страниц3m Filtrete Fap 04 SeriesJP anonymousОценок пока нет
- Books PDFДокумент1 страницаBooks PDFoghaleudoluОценок пока нет
- Building A Phase ConverterДокумент11 страницBuilding A Phase ConverterAlvaro Del Cid100% (1)
- Abeba DebruДокумент90 страницAbeba Debruabera alemayehuОценок пока нет
- This Product Is Also Available As A Modular Mechanical System Electric Cylinder EPCCДокумент40 страницThis Product Is Also Available As A Modular Mechanical System Electric Cylinder EPCCSysviewОценок пока нет
- 26MF605W - LCD TV MonitorДокумент108 страниц26MF605W - LCD TV MonitorJesus SilvaОценок пока нет
- Nuoc Tiêu Nua 50Документ62 страницыNuoc Tiêu Nua 50Phuong Long PhamОценок пока нет
- GauravДокумент26 страницGauravgauravОценок пока нет
- Centurion List PriceДокумент3 страницыCenturion List Pricehubul_watanОценок пока нет
- Discrete Signal Processing Experiment 5 CodeДокумент3 страницыDiscrete Signal Processing Experiment 5 CodedeeptakshdОценок пока нет
- Computer Organization - Study MaterialДокумент5 страницComputer Organization - Study MaterialDinesh VelОценок пока нет
- SB 22BДокумент8 страницSB 22Bghiles100% (1)
- Specification For Motor Actuators For ValvesДокумент13 страницSpecification For Motor Actuators For ValvesDanish MohammedОценок пока нет
- Scp-C. Instruction Manual 2009Документ62 страницыScp-C. Instruction Manual 2009Arkady ZabrovßkyОценок пока нет
- Product Overview: Data Sheet - H665GR GPON Gigabit ONT With Video ServiceДокумент7 страницProduct Overview: Data Sheet - H665GR GPON Gigabit ONT With Video ServiceTuấn minh DuongОценок пока нет
- Ixan0010 PDFДокумент26 страницIxan0010 PDFBenito Rivera EdmundoОценок пока нет
- Protection in 400kvДокумент18 страницProtection in 400kvmanoharmanishОценок пока нет
- NPAG2012 CompleteДокумент792 страницыNPAG2012 Completemsiantex100% (1)
- 854DG85VTEXYДокумент2 страницы854DG85VTEXYfaapctbaОценок пока нет
- OTDR TRAINING 83 SlideДокумент83 страницыOTDR TRAINING 83 SlideFerry Kurniawan80% (5)
- D-5450-1-B HS60G80GL SM EngДокумент84 страницыD-5450-1-B HS60G80GL SM EngRuslan Valiakhmetov100% (2)
- DSE9470 MKII Data SheetДокумент2 страницыDSE9470 MKII Data SheetArnelОценок пока нет
- Passenger Bus Alert System For Easy Navigation of BlindДокумент5 страницPassenger Bus Alert System For Easy Navigation of BlindArshad Mohammed0% (1)
- Boschrexroth Re29993Документ4 страницыBoschrexroth Re29993Service - Anda Hydraulics Asia Pte LtdОценок пока нет
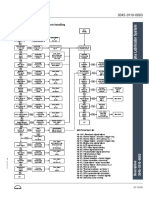
- 63 Sequence Diagram For Alarm HandlingДокумент1 страница63 Sequence Diagram For Alarm HandlingNick SkiadasОценок пока нет
- Protocol Database For Automatic Circuit Reclosers With Advanced ControllersДокумент205 страницProtocol Database For Automatic Circuit Reclosers With Advanced ControllersCata CatalinОценок пока нет
- Manual Sinamics G120Документ120 страницManual Sinamics G120David AndreicaОценок пока нет