Вам также может понравиться
- Circuit Simulation of A BLDC MotorДокумент4 страницыCircuit Simulation of A BLDC MotorjpmacabascoОценок пока нет
- Electrical Machines: Lecture Notes for Electrical Machines CourseОт EverandElectrical Machines: Lecture Notes for Electrical Machines CourseОценок пока нет
- Power Electronics and Electric Drives for Traction ApplicationsОт EverandPower Electronics and Electric Drives for Traction ApplicationsОценок пока нет
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlОт EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlРейтинг: 5 из 5 звезд5/5 (1)
- Power Electronics: Lecture Notes of Power Electronics CourseОт EverandPower Electronics: Lecture Notes of Power Electronics CourseОценок пока нет
- BLDCДокумент4 страницыBLDCmechtex Pvt LtdОценок пока нет
- Universal Motors: Presented by Meraj WarsiДокумент13 страницUniversal Motors: Presented by Meraj WarsiMeraj WarsiОценок пока нет
- Regenerative Braking of BLDC MotorsДокумент21 страницаRegenerative Braking of BLDC Motorsalthaf hussainОценок пока нет
- DC-DC ConverterДокумент24 страницыDC-DC ConverterkandularanjithОценок пока нет
- PX7203-Special Electrical Machines PDFДокумент11 страницPX7203-Special Electrical Machines PDFvaishnavisriОценок пока нет
- Brushless DC Motor ReportДокумент2 страницыBrushless DC Motor ReportAnonymous 7Q1NIAОценок пока нет
- Servo MotorДокумент16 страницServo MotorMinh Tuan Tran100% (1)
- Brushless DC MotorДокумент6 страницBrushless DC Motorpsksiva13Оценок пока нет
- Speed Control of BLDC Motor For Electric Vehicle: Presented byДокумент13 страницSpeed Control of BLDC Motor For Electric Vehicle: Presented byPawan Chauhan100% (1)
- Unit 3Документ5 страницUnit 3Narasimman DonОценок пока нет
- 开关磁阻电机的ANSOFT建模方法Документ28 страниц开关磁阻电机的ANSOFT建模方法Nuwantha FernandoОценок пока нет
- Brushless DC MotorДокумент19 страницBrushless DC MotorSanjeet KumarОценок пока нет
- BLDCДокумент4 страницыBLDCsathishОценок пока нет
- BLDC Brushless DC MotorДокумент22 страницыBLDC Brushless DC MotorNyn SoniОценок пока нет
- Eeeviews: Unit Iv Synchronous Motor DrivesДокумент26 страницEeeviews: Unit Iv Synchronous Motor Driveskrithikgokul selvamОценок пока нет
- Construction and Working of Brushless DC PDFДокумент12 страницConstruction and Working of Brushless DC PDFaswardi8756Оценок пока нет
- Documentation of PMSMДокумент89 страницDocumentation of PMSM07be1a0213Оценок пока нет
- Reluctance MotorДокумент16 страницReluctance Motorapi-382713280% (5)
- Application of Brushless DC Motor in MilitaryДокумент10 страницApplication of Brushless DC Motor in Militarymighty_heart100% (1)
- Chapter 1 - Electric DriveДокумент76 страницChapter 1 - Electric DriveNajihah YusofОценок пока нет
- Permanent Magnet Brushless DC MotorДокумент18 страницPermanent Magnet Brushless DC MotorBala SubramanianОценок пока нет
- Brushless D.C. Motors: Prepared By: Manuj Garg (2k13/EE/070) Mohit Goswami (2k13/EE/073)Документ17 страницBrushless D.C. Motors: Prepared By: Manuj Garg (2k13/EE/070) Mohit Goswami (2k13/EE/073)Manuj GargОценок пока нет
- of BLDCДокумент45 страницof BLDCsmhbОценок пока нет
- Switched Reluctance Motor (SRM)Документ8 страницSwitched Reluctance Motor (SRM)Ömer Faruk AbdullahОценок пока нет
- 2.review of Literature and Statement of ProblemДокумент6 страниц2.review of Literature and Statement of ProblemsheriabhiОценок пока нет
- Universal Motor - WikipediaДокумент27 страницUniversal Motor - WikipediaAlejandro ReyesОценок пока нет
- BLDC Motor Control ANfpgaДокумент8 страницBLDC Motor Control ANfpgasraamu2k55068100% (1)
- Sensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationДокумент7 страницSensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationPhạm Văn TưởngОценок пока нет
- Design of Synchronous MachinesДокумент17 страницDesign of Synchronous MachinesNiteshNarukaОценок пока нет
- Ch7 Induction MotorДокумент82 страницыCh7 Induction MotorMuhammad R ShihadehОценок пока нет
- Construction of Three Phase Induction MotorДокумент18 страницConstruction of Three Phase Induction MotorRajeev ValunjkarОценок пока нет
- EE2403 Special Electrical MachinesДокумент19 страницEE2403 Special Electrical MachinesvasanthavananОценок пока нет
- Alireza Tashakori Abkenar Thesis PDFДокумент199 страницAlireza Tashakori Abkenar Thesis PDFYesha ShahОценок пока нет
- BLDC ControlДокумент16 страницBLDC ControlSaurabh DashОценок пока нет
- Medical Application of BLDCДокумент5 страницMedical Application of BLDCAbd Al HAmidОценок пока нет
- Induction Motor BrakingДокумент26 страницInduction Motor BrakingAshwini Singh100% (3)
- Induction MotorsДокумент25 страницInduction Motorsapi-3827132100% (2)
- Industrial DrivesДокумент1 страницаIndustrial DrivesSatish NurukurthiОценок пока нет
- Electric Motor Drives and their Applications with Simulation PracticesОт EverandElectric Motor Drives and their Applications with Simulation PracticesОценок пока нет
- Basic SVPWMДокумент6 страницBasic SVPWMVAMSIKRISHNAEEEОценок пока нет
- Construction of Synrel MotorДокумент18 страницConstruction of Synrel MotorAshok Kumar100% (4)
- 1 Field Oriented Control of Induction Motor 12/6/2015Документ36 страниц1 Field Oriented Control of Induction Motor 12/6/2015Belal Ashraf100% (1)
- Operation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurДокумент6 страницOperation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurAhana MalhotraОценок пока нет
- Four - Quadrant Control SystemsДокумент4 страницыFour - Quadrant Control SystemsRICHARDОценок пока нет
- Week 71Документ25 страницWeek 71Raphael SebucОценок пока нет
- Novel Dual-Excitation Permanent Magnet Vernier Machine: Akio Toba Thomas A. LipoДокумент6 страницNovel Dual-Excitation Permanent Magnet Vernier Machine: Akio Toba Thomas A. LipoNenad Kostadinovic50% (2)
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977От EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Оценок пока нет
- Improved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)От EverandImproved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)Оценок пока нет
- LJLVJK LVJJV LKJVДокумент5 страницLJLVJK LVJJV LKJVvishiwizardОценок пока нет
- ACM2 TAU Datasheet enДокумент5 страницACM2 TAU Datasheet envishiwizardОценок пока нет
- 50 SCS Automotive Coatings - Rev0913Документ4 страницы50 SCS Automotive Coatings - Rev0913vishiwizardОценок пока нет
- Hardware Inloop Simulation IEEE LabVIEWДокумент1 страницаHardware Inloop Simulation IEEE LabVIEWvishiwizardОценок пока нет
- Electric Vehicle Motor Design NotesДокумент131 страницаElectric Vehicle Motor Design NotesvishiwizardОценок пока нет
- Part Winding Startting The Three-Phase Squirrel Cage Induction Motor Air Gap Magnetic Field AnalysisДокумент6 страницPart Winding Startting The Three-Phase Squirrel Cage Induction Motor Air Gap Magnetic Field AnalysisIjabiОценок пока нет
- Jeas 1012 787Документ5 страницJeas 1012 787vishiwizardОценок пока нет
- 5 SmanualДокумент16 страниц5 SmanualMark ThomasОценок пока нет
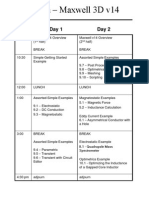
- 852 3D AgendaДокумент1 страница852 3D AgendavishiwizardОценок пока нет
- TRL Definitions PDFДокумент1 страницаTRL Definitions PDFBHARadwajОценок пока нет
- Engineered PlasticsДокумент61 страницаEngineered Plastics고병석Оценок пока нет
- FTF Aut f0234Документ38 страницFTF Aut f0234vishiwizardОценок пока нет
- ReadmeДокумент4 страницыReadmevishiwizardОценок пока нет
- Recent Advances in Materials For Use in Permanent Magnet Machines - A ReviewДокумент7 страницRecent Advances in Materials For Use in Permanent Magnet Machines - A ReviewvishiwizardОценок пока нет
- Insulating Varnish OverviewДокумент2 страницыInsulating Varnish OverviewvishiwizardОценок пока нет
- Op - XT546 246 346 - Op288 V03Документ2 страницыOp - XT546 246 346 - Op288 V03vishiwizardОценок пока нет
- Nit 3600 1Документ5 страницNit 3600 1vishiwizardОценок пока нет
- Presentation 1Документ1 страницаPresentation 1vishiwizardОценок пока нет
- Big Energy Series 11.5.2012 Qing-Chang ZhongДокумент1 страницаBig Energy Series 11.5.2012 Qing-Chang ZhongvishiwizardОценок пока нет
- FAB Resistivity White PaperДокумент8 страницFAB Resistivity White PapervishiwizardОценок пока нет
- Wittich2011 SonkusaleVanderveldeДокумент1 страницаWittich2011 SonkusaleVanderveldevishiwizardОценок пока нет
- Lit Survey RamamurthyДокумент9 страницLit Survey RamamurthyvishiwizardОценок пока нет
- Sensors Used in HEVДокумент4 страницыSensors Used in HEVvishiwizard100% (1)
- Maxwell 2dДокумент7 страницMaxwell 2dvishiwizardОценок пока нет
- BLDC DesignДокумент13 страницBLDC DesignvishiwizardОценок пока нет
- Cam DesignДокумент13 страницCam DesignvishiwizardОценок пока нет
- How To Check A MOSFET Using A Digital Multimeter - Homemade Circuit Designs Just For YouДокумент2 страницыHow To Check A MOSFET Using A Digital Multimeter - Homemade Circuit Designs Just For YouvishiwizardОценок пока нет
- Sona SPEED CatalogueДокумент13 страницSona SPEED CataloguevishiwizardОценок пока нет
- Motor Primer1Документ2 страницыMotor Primer1vishiwizardОценок пока нет
- A Brief Overview of Electric & Hybrid Electric Vehicle TechnologiesДокумент1 страницаA Brief Overview of Electric & Hybrid Electric Vehicle TechnologiesvishiwizardОценок пока нет
- Fiber OpticДокумент9 страницFiber OpticBHUMIОценок пока нет
- Objectives (Antennas and Wave Propagation)Документ13 страницObjectives (Antennas and Wave Propagation)Anonymous sBvtnZQОценок пока нет
- An Endfire Circularly Polarized Complementary Antenna Array For 5G ApplicationsДокумент9 страницAn Endfire Circularly Polarized Complementary Antenna Array For 5G ApplicationsDivanshu JainОценок пока нет
- Laser NumericalsДокумент3 страницыLaser NumericalsMedha Mani0% (2)
- Infrared SpectrosДокумент24 страницыInfrared Spectrosdatha saiОценок пока нет
- 140 TOP TRANSFORMERS Multiple Choice Questions and AnswersДокумент29 страниц140 TOP TRANSFORMERS Multiple Choice Questions and AnswersEarl Jenn AbellaОценок пока нет
- Module-1 - Engineering PhysicsДокумент40 страницModule-1 - Engineering PhysicsT. VARMAОценок пока нет
- Disha Publication Electrical Concept Notes With Exercies Electrical MachinesДокумент64 страницыDisha Publication Electrical Concept Notes With Exercies Electrical MachinesRal Meena100% (1)
- Isc Semester 2 Examination Specimen Question Paper Physics Paper 1 (Theory)Документ5 страницIsc Semester 2 Examination Specimen Question Paper Physics Paper 1 (Theory)marleyОценок пока нет
- Optics - Contact Lens Related - MMSДокумент38 страницOptics - Contact Lens Related - MMSManmohan ShahОценок пока нет
- Physics Value Based Questions Chapter 11 Dual Nature of Radiation and Matter PDFДокумент39 страницPhysics Value Based Questions Chapter 11 Dual Nature of Radiation and Matter PDFMohammad HuzaifaОценок пока нет
- ISO 7027 Turbidity TechniqueДокумент2 страницыISO 7027 Turbidity TechniqueGustavo Sánchez0% (1)
- Color PerceptionДокумент11 страницColor Perceptionrasagna reddyОценок пока нет
- Physics Practice 2Документ8 страницPhysics Practice 2Rinku GhoshОценок пока нет
- RadiationДокумент17 страницRadiationCheppanu BrotherОценок пока нет
- Physics-Project-Class-XII-2021-22-Investigatory-Project (1) OJASVIRAJДокумент16 страницPhysics-Project-Class-XII-2021-22-Investigatory-Project (1) OJASVIRAJaggrima0% (1)
- 120 TOP SINGLE PHASE INDUCTION MOTORS Multiple Choice Questions Electrical Engineering Multiple Choice QuestionsДокумент36 страниц120 TOP SINGLE PHASE INDUCTION MOTORS Multiple Choice Questions Electrical Engineering Multiple Choice QuestionsRaju Ranjan50% (2)
- Noise From Optical Amplifiers: - EDFA Noise - Raman NoiseДокумент23 страницыNoise From Optical Amplifiers: - EDFA Noise - Raman NoiseBui TheQuanОценок пока нет
- Induction Motor EE 307 NewДокумент25 страницInduction Motor EE 307 NewVaradhanОценок пока нет
- Price-List RUB 2023-09-22Документ4 страницыPrice-List RUB 2023-09-22Boby FaesalОценок пока нет
- He Ne LaserДокумент6 страницHe Ne LaserGaurav Kumar TiwariОценок пока нет
- 5 PdaДокумент20 страниц5 PdaKedarnath JakkaОценок пока нет
- Raman DissertationДокумент5 страницRaman DissertationBuyWritingPaperElgin100% (1)
- Experiment 8Документ2 страницыExperiment 8Yash BhimaniОценок пока нет
- Wave OpticsДокумент41 страницаWave OpticsAshishSinghОценок пока нет
- EN SET 081bis 03Документ40 страницEN SET 081bis 03Nazia KhanОценок пока нет
- OPTICAL ANOMALIES IN MINERALS GoodДокумент3 страницыOPTICAL ANOMALIES IN MINERALS GooddeshmukhgeolОценок пока нет
- Electronics - Q3 - Week4-5 - Inductors - Answer SheetДокумент2 страницыElectronics - Q3 - Week4-5 - Inductors - Answer SheetMelissa Gagujas0% (1)
- PMT Tpmz0001eДокумент138 страницPMT Tpmz0001eamit281276Оценок пока нет
- ECE330 Power Circuits and Electromechanics: Dr. Nam Nguyen-Quang Fall 2016Документ9 страницECE330 Power Circuits and Electromechanics: Dr. Nam Nguyen-Quang Fall 2016Tran Nguyen KhangОценок пока нет