Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Blake Mouton Managerial GridДокумент3 страницыBlake Mouton Managerial GridRashwanth Tc100% (1)
- PDS DeltaV SimulateДокумент9 страницPDS DeltaV SimulateJesus JuarezОценок пока нет
- Management Accounting by Cabrera Solution Manual 2011 PDFДокумент3 страницыManagement Accounting by Cabrera Solution Manual 2011 PDFClaudette Clemente100% (1)
- Church and Community Mobilization (CCM)Документ15 страницChurch and Community Mobilization (CCM)FreethinkerTianОценок пока нет
- Sheet-Metal Forming Processes: Group 9 PresentationДокумент90 страницSheet-Metal Forming Processes: Group 9 PresentationjssrikantamurthyОценок пока нет
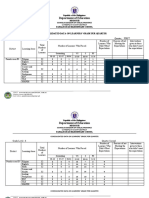
- Department of Education: Consolidated Data On Learners' Grade Per QuarterДокумент4 страницыDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaОценок пока нет
- Ficha Técnica Panel Solar 590W LuxenДокумент2 страницыFicha Técnica Panel Solar 590W LuxenyolmarcfОценок пока нет
- CE EVALUATION EXAM No. 4 - MGT, Fluid Properties, Hydrostatic Force (Answer Key)Документ6 страницCE EVALUATION EXAM No. 4 - MGT, Fluid Properties, Hydrostatic Force (Answer Key)Angelice Alliah De la CruzОценок пока нет
- 123Документ3 страницы123Phoebe AradoОценок пока нет
- A202 KBK3043 - Assignment Individual (20%) Review LiteratureДокумент5 страницA202 KBK3043 - Assignment Individual (20%) Review LiteratureAlfie AliОценок пока нет
- AYUMJAДокумент1 страницаAYUMJASoumet Das SoumetОценок пока нет
- Poster-Shading PaperДокумент1 страницаPoster-Shading PaperOsama AljenabiОценок пока нет
- Aristotle - OCR - AS Revision NotesДокумент3 страницыAristotle - OCR - AS Revision NotesAmelia Dovelle0% (1)
- Internal Resistance To Corrosion in SHS - To Go On WebsiteДокумент48 страницInternal Resistance To Corrosion in SHS - To Go On WebsitetheodorebayuОценок пока нет
- Core CompetenciesДокумент3 страницыCore Competenciesapi-521620733Оценок пока нет
- English For Academic and Professional Purposes - ExamДокумент3 страницыEnglish For Academic and Professional Purposes - ExamEddie Padilla LugoОценок пока нет
- Bone Surface MarkingsДокумент2 страницыBone Surface MarkingsNurul Afiqah Fattin AmatОценок пока нет
- DTR Testastretta Valve Adjustment ProcedureДокумент10 страницDTR Testastretta Valve Adjustment ProcedureTony LamprechtОценок пока нет
- IJRHAL - Exploring The Journey of Steel Authority of India (SAIL) As A Maharatna CompanyДокумент12 страницIJRHAL - Exploring The Journey of Steel Authority of India (SAIL) As A Maharatna CompanyImpact JournalsОценок пока нет
- Concrete Pumping.: Squeeze PumpsДокумент2 страницыConcrete Pumping.: Squeeze PumpsALINDA BRIANОценок пока нет
- Expression of Interest (Eoi)Документ1 страницаExpression of Interest (Eoi)Mozaffar HussainОценок пока нет
- Ce-Series - TK60981-ML-18 IM - Rev - 0 - 05-13Документ96 страницCe-Series - TK60981-ML-18 IM - Rev - 0 - 05-13VERDADE MUNDIAL GUERRAОценок пока нет
- 'Causative' English Quiz & Worksheet UsingEnglish ComДокумент2 страницы'Causative' English Quiz & Worksheet UsingEnglish ComINAWATI BINTI AMING MoeОценок пока нет
- Electronic Diversity Visa ProgrambДокумент1 страницаElectronic Diversity Visa Programbsamkimari5Оценок пока нет
- Homework 9Документ1 страницаHomework 9Nat Dabuét0% (1)
- TM Mic Opmaint EngДокумент186 страницTM Mic Opmaint Engkisedi2001100% (2)
- WWW Ranker Com List Best-Isekai-Manga-Recommendations Ranker-AnimeДокумент8 страницWWW Ranker Com List Best-Isekai-Manga-Recommendations Ranker-AnimeDestiny EasonОценок пока нет
- Michael Clapis Cylinder BlocksДокумент5 страницMichael Clapis Cylinder Blocksapi-734979884Оценок пока нет
- Jinivefsiti: Sultan LorisДокумент13 страницJinivefsiti: Sultan LorisSITI HAJAR BINTI MOHD LATEPIОценок пока нет
- CPD - SampleДокумент3 страницыCPD - SampleLe Anh DungОценок пока нет