Вам также может понравиться
- Self Calibration of Small and Medium Format Digital CamerasДокумент6 страницSelf Calibration of Small and Medium Format Digital CamerasOke Joko HaniloОценок пока нет
- Geometric Aspects Concerning The Photogrammetric Workflow of The Digital Aerial Camera UltracamДокумент6 страницGeometric Aspects Concerning The Photogrammetric Workflow of The Digital Aerial Camera UltracamMano DragonОценок пока нет
- Camera CalibrationДокумент39 страницCamera CalibrationyokeshОценок пока нет
- 110 Doers TelДокумент8 страниц110 Doers TelAtha RabbitaОценок пока нет
- Ivs2006 2Документ8 страницIvs2006 2Ricardo RomeroОценок пока нет
- 4 Step Camera CalibrationДокумент7 страниц4 Step Camera Calibrationapex900Оценок пока нет
- Analytical & Digital PhotogrammetryДокумент46 страницAnalytical & Digital PhotogrammetryLuis Marquez Guillen100% (3)
- ControladoresДокумент19 страницControladoresJesus HuamaniОценок пока нет
- Motion of An Uncalibrated Stereo Rig Self-Calibration and Metric ReconstructionДокумент11 страницMotion of An Uncalibrated Stereo Rig Self-Calibration and Metric ReconstructionfmannanОценок пока нет
- Simlote 2019 Ijca 919377 PDFДокумент4 страницыSimlote 2019 Ijca 919377 PDFMegha SimloteОценок пока нет
- Straight Lines Have To Be Straight: Automatic Calibration and Removal of Distortion From Scenes of Structured EnviromentsДокумент13 страницStraight Lines Have To Be Straight: Automatic Calibration and Removal of Distortion From Scenes of Structured EnviromentsArbitОценок пока нет
- SLAC-TN-10-016: Work Supported in Part by US Department of Energy Contract DE-AC02-76SF00515Документ17 страницSLAC-TN-10-016: Work Supported in Part by US Department of Energy Contract DE-AC02-76SF00515oscarcmОценок пока нет
- Digital Photogrammetry2014Документ125 страницDigital Photogrammetry2014iurist_nicoletaОценок пока нет
- Digital Camera Calibration Using Images Taken FromДокумент5 страницDigital Camera Calibration Using Images Taken Fromjokosambung jokoОценок пока нет
- Extrinsic Recalibration in Camera Networks: June 2007Документ9 страницExtrinsic Recalibration in Camera Networks: June 2007ramzi abidiОценок пока нет
- Multi-Camera Calibration Method Based On Minimizing The Difference of Reprojection Error VectorsДокумент10 страницMulti-Camera Calibration Method Based On Minimizing The Difference of Reprojection Error VectorsRiyaan BakhdaОценок пока нет
- Quantitative Measures For The Evaluation of Camera StabilityДокумент7 страницQuantitative Measures For The Evaluation of Camera StabilityKobalt von KriegerischbergОценок пока нет
- Camera Calibration From A Single Night Sky ImageДокумент7 страницCamera Calibration From A Single Night Sky ImageZikang XieОценок пока нет
- Extrinsic Parameters Calibration Method of Cameras PDFДокумент18 страницExtrinsic Parameters Calibration Method of Cameras PDFghaiethОценок пока нет
- Camera Calibration Using Three Sets of Parallel Lines Echigo1990Документ9 страницCamera Calibration Using Three Sets of Parallel Lines Echigo1990Rajul RahmadОценок пока нет
- 2D 1 2 Visual Servoing Stability Analysis With Respect To Camera Calibration ErrorsДокумент7 страниц2D 1 2 Visual Servoing Stability Analysis With Respect To Camera Calibration ErrorsMotasim MustafaОценок пока нет
- Tracking Deflection in The Field Using Optical System A Case StudyДокумент5 страницTracking Deflection in The Field Using Optical System A Case Studyferhad_huseynovОценок пока нет
- Calibración CámaraДокумент7 страницCalibración CámaraErick Poumián PalomecОценок пока нет
- An Evaluation of Camera Calibration MethДокумент7 страницAn Evaluation of Camera Calibration Methximena zeballosОценок пока нет
- Ekf 3stateДокумент18 страницEkf 3stateAlp GürkaynakОценок пока нет
- Camera Calibration Technique Using Tsai'S Algorithm: Vol. 1 Issue 2 January 2011Документ9 страницCamera Calibration Technique Using Tsai'S Algorithm: Vol. 1 Issue 2 January 2011admin2146Оценок пока нет
- Measurement of Shrinkage in Concrete Samples by UsДокумент5 страницMeasurement of Shrinkage in Concrete Samples by UsAchraf BouraОценок пока нет
- A Vision-Based Algorithm For Landing Unmanned Aerial VehiclesДокумент4 страницыA Vision-Based Algorithm For Landing Unmanned Aerial VehiclesSalman Ahmed KhanОценок пока нет
- 3D Time-Of - Ight Cameras For Mobile RoboticsДокумент6 страниц3D Time-Of - Ight Cameras For Mobile RoboticsNameZero912Оценок пока нет
- A W, J W: Lbert Eckenmann Ohannes EickmannДокумент10 страницA W, J W: Lbert Eckenmann Ohannes Eickmannkalvino314Оценок пока нет
- IJCSESДокумент27 страницIJCSESijcsesОценок пока нет
- Development and Calibration of The Airborne Three-Line Scanner (TLS) Imaging SystemДокумент8 страницDevelopment and Calibration of The Airborne Three-Line Scanner (TLS) Imaging SystemRatiu IonutОценок пока нет
- Calibration of Photomasks For Optical Coordinate MetrologyДокумент12 страницCalibration of Photomasks For Optical Coordinate MetrologyAlessandroAbateОценок пока нет
- A Simple Low Cost 3d Scanning System Using The Laser Light Sectioning Method 2008Документ6 страницA Simple Low Cost 3d Scanning System Using The Laser Light Sectioning Method 2008Gerardo SanchezОценок пока нет
- PCB Exposure and Data Matrix Based Job Verification: Adam Marchewka, Ryszard Wocianiec, Jarosław ZdrojewskiДокумент8 страницPCB Exposure and Data Matrix Based Job Verification: Adam Marchewka, Ryszard Wocianiec, Jarosław ZdrojewskiShahrulJamalОценок пока нет
- PKM 2003aДокумент4 страницыPKM 2003akpk1989Оценок пока нет
- Section 2. Data Collection and Documentation: 2.1 Typical Steps For A CRP Project 2.1.1 Project Level DocumentationДокумент4 страницыSection 2. Data Collection and Documentation: 2.1 Typical Steps For A CRP Project 2.1.1 Project Level DocumentationAzem GanuОценок пока нет
- Payeurl,: Beriault'Документ6 страницPayeurl,: Beriault'infodotzОценок пока нет
- A Simple, Low Cost, 3D Scanning System Using The Laser Light-Sectioning MethodДокумент6 страницA Simple, Low Cost, 3D Scanning System Using The Laser Light-Sectioning Methodsantoimam112Оценок пока нет
- CD Paper Pag 179Документ10 страницCD Paper Pag 179Anonymous lEBdswQXmxОценок пока нет
- Orthorectification of Satellite Images Using External Dems From IfsarДокумент6 страницOrthorectification of Satellite Images Using External Dems From IfsarNugra PutraОценок пока нет
- Feature-Based Aerial Image Registration and MosaicingДокумент32 страницыFeature-Based Aerial Image Registration and Mosaicingmkd2000Оценок пока нет
- Plane-Space Algorithm Based On Binocular Stereo Vision With Its Estimation of Range and Measurement BoundaryДокумент8 страницPlane-Space Algorithm Based On Binocular Stereo Vision With Its Estimation of Range and Measurement BoundaryGSET LibraryОценок пока нет
- Project1Report (Prakash)Документ12 страницProject1Report (Prakash)pgnepal100% (1)
- 15arspc Submission 109Документ9 страниц15arspc Submission 109reneebartoloОценок пока нет
- Photogrammetry Mathematics 080116Документ128 страницPhotogrammetry Mathematics 080116firosekhan100% (2)
- Project Papers 2006Документ352 страницыProject Papers 2006anon_596887959Оценок пока нет
- Camera Calibration ThesisДокумент5 страницCamera Calibration Thesislaurahallportland100% (2)
- Autonomous Landing of An Unmanned Helicopter Based On Vision and Inertial SensingДокумент11 страницAutonomous Landing of An Unmanned Helicopter Based On Vision and Inertial SensingKarthik NiyanthaОценок пока нет
- Zhang 2002Документ14 страницZhang 2002Liem NguyenОценок пока нет
- Experiments in 3D Measurements by Using Single Camera and Accurate MotionДокумент6 страницExperiments in 3D Measurements by Using Single Camera and Accurate MotionĐường Khánh SơnОценок пока нет
- Automatic Aircraft Recognition Using DSMT and HMMДокумент8 страницAutomatic Aircraft Recognition Using DSMT and HMMDon HassОценок пока нет
- Photogrammetry Mathematics 080116Документ128 страницPhotogrammetry Mathematics 080116Ken Lim100% (1)
- Robot-Sensor System Integration by Means Vision Ultrasonic Sensing For Localization and Recognition ObjectsДокумент7 страницRobot-Sensor System Integration by Means Vision Ultrasonic Sensing For Localization and Recognition ObjectsRavi SharmaОценок пока нет
- Comp GraДокумент7 страницComp GraCassiano FerriОценок пока нет
- Intelligent Vision System Quality Class Airport Lamp Prisms CorrectedДокумент4 страницыIntelligent Vision System Quality Class Airport Lamp Prisms CorrectedAdam DabrowskiОценок пока нет
- Measurement of The Spatial Frequency Response SFRДокумент10 страницMeasurement of The Spatial Frequency Response SFRpabloОценок пока нет
- Journal of Physics (ITNT) - 2019Документ11 страницJournal of Physics (ITNT) - 2019ИванОценок пока нет
- 3.lecture - 2 Type of Areal PhotgraphДокумент34 страницы3.lecture - 2 Type of Areal PhotgraphFen Ta HunОценок пока нет
- Rife US1727618Документ3 страницыRife US1727618BarneyHolmesОценок пока нет
- Canon T2i ManualДокумент260 страницCanon T2i ManualXu JunОценок пока нет
- Explosion-Proof HD Pan/Tilt/Zoom Camera: APTZ-3045-09Документ2 страницыExplosion-Proof HD Pan/Tilt/Zoom Camera: APTZ-3045-09Luis Maragaño AguilarОценок пока нет
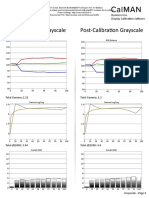
- Element EL4KAMZ5517 (Amazon Fire TV Edition) CNET Review Calibration ResultsДокумент3 страницыElement EL4KAMZ5517 (Amazon Fire TV Edition) CNET Review Calibration ResultsDavid KatzmaierОценок пока нет
- Photographing The Northern LightsДокумент24 страницыPhotographing The Northern LightsDianacjeОценок пока нет
- Light Pollution ReductionДокумент3 страницыLight Pollution ReductionMarioyfernanda Guerra MuruaОценок пока нет
- Chemistry in Focus A Molecular View of Our World 6th Edition Tro Test BankДокумент14 страницChemistry in Focus A Molecular View of Our World 6th Edition Tro Test Bankbeyradicantdays100% (33)
- DG-10-98 IESNA Guide To Choosing Light Sources For General LightingДокумент20 страницDG-10-98 IESNA Guide To Choosing Light Sources For General LightingfmtzvargasОценок пока нет
- Sensory & Motor MechanismsДокумент23 страницыSensory & Motor MechanismsAgatha100% (1)
- Ni MicroscopeДокумент15 страницNi Microscopeozzy75Оценок пока нет
- Lighting Lumen Calculation (10.6.13)Документ12 страницLighting Lumen Calculation (10.6.13)jiguparmar1516Оценок пока нет
- 11.A Version of Watershed Algorithm For Color Image SegmentationДокумент32 страницы11.A Version of Watershed Algorithm For Color Image SegmentationbudiОценок пока нет
- Turbidity: DR 900 Analytical ProcedureДокумент2 страницыTurbidity: DR 900 Analytical Procedurewulalan wulanОценок пока нет
- LITHOGRAPHY-Chapter 5: - Litography Limits The Minimum Feature Size That Can Be Printable On The WaferДокумент22 страницыLITHOGRAPHY-Chapter 5: - Litography Limits The Minimum Feature Size That Can Be Printable On The WafereniОценок пока нет
- Katalog Opto Standard Tdoct0219a - EngДокумент540 страницKatalog Opto Standard Tdoct0219a - EngJavier Izquierdo0% (1)
- What To Do When Faced With Low Light: PhotzyДокумент16 страницWhat To Do When Faced With Low Light: PhotzyLuis Eduardo dos SantosОценок пока нет
- SDH Basics Transport SRJ VC TRG 12-12-07Документ147 страницSDH Basics Transport SRJ VC TRG 12-12-07Vivek KhatriОценок пока нет
- Optical InstrumentsДокумент2 страницыOptical InstrumentsJane PangilinanОценок пока нет
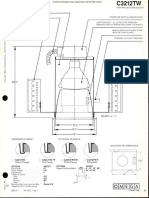
- Omega Lighting C3212TW INC PAR-38 Paracone Downlight Spec Sheet 1-86Документ2 страницыOmega Lighting C3212TW INC PAR-38 Paracone Downlight Spec Sheet 1-86Alan MastersОценок пока нет
- Cine Xenar PriceListДокумент1 страницаCine Xenar PriceListAnonymous RRYuFXtKОценок пока нет
- MCQs Optical Fiber CommunicationДокумент37 страницMCQs Optical Fiber Communicationshamsundar kulkarniОценок пока нет
- Importance of Forensic Photography in A Crime Scene InvestigationДокумент4 страницыImportance of Forensic Photography in A Crime Scene InvestigationSophia Nadine MauricioОценок пока нет
- SLS-50 ManualДокумент20 страницSLS-50 Manualantonio bonillaОценок пока нет
- Surface Plasmon Polaritons PDFДокумент3 страницыSurface Plasmon Polaritons PDFlykaonasОценок пока нет
- Sem Examination of Micromorphology Changes of Intracanal Dentine After Treatment With Diode LaserДокумент6 страницSem Examination of Micromorphology Changes of Intracanal Dentine After Treatment With Diode LaserDimitar KosturkovОценок пока нет
- WinCamD DatasheetДокумент11 страницWinCamD DatasheetAmin MahmoodОценок пока нет
- Introduction To Digital Image Processing-WKFДокумент26 страницIntroduction To Digital Image Processing-WKFAqmal Insan cendekiaОценок пока нет
- The Human Visual SystemДокумент1 страницаThe Human Visual SystemJosmar Guillermo GómezОценок пока нет
- DH HAC HFW1400T A - Datasheet - 20181023Документ3 страницыDH HAC HFW1400T A - Datasheet - 20181023Kaddouri KaddaОценок пока нет