Вам также может понравиться
- Precision Machine DesignДокумент56 страницPrecision Machine DesignFelipe Soares MaiaОценок пока нет
- Precision Machine DesignДокумент32 страницыPrecision Machine DesignnadjibwassimОценок пока нет
- Broschure FlexiblemountsДокумент155 страницBroschure FlexiblemountsPrabakar MahesanОценок пока нет
- Module Title: Vibrations Module Code: Mee 3263Документ26 страницModule Title: Vibrations Module Code: Mee 3263Mï XavierОценок пока нет
- Precision Machine Design: Topic 3 Examples of ErrorsДокумент24 страницыPrecision Machine Design: Topic 3 Examples of ErrorsFelipe Soares MaiaОценок пока нет
- Precision Machine Design: Topic 19 Power Transmission System RequirementsДокумент26 страницPrecision Machine Design: Topic 19 Power Transmission System RequirementsFelipe Soares MaiaОценок пока нет
- Friction Compensation for a Double Inverted Pendulum Using a Modified First-Order Dahl ModelДокумент6 страницFriction Compensation for a Double Inverted Pendulum Using a Modified First-Order Dahl Modelمحمد المهندسОценок пока нет
- Noise, Vibration and HarshnessДокумент71 страницаNoise, Vibration and HarshnessPrashanth Kumar0% (1)
- Modeling and Analysis of Elevated Skid Mounted High Speed Compressor StructureДокумент44 страницыModeling and Analysis of Elevated Skid Mounted High Speed Compressor Structuremasum91032Оценок пока нет
- Chiang LiuДокумент87 страницChiang LiuRanjit Kumar TAОценок пока нет
- Wireless Power Tranfer Using: Magnetic Resonance CouplingДокумент28 страницWireless Power Tranfer Using: Magnetic Resonance CouplingStephen DavidsamuelОценок пока нет
- Non Linear Analysis-Pushover (Sap 2000)Документ69 страницNon Linear Analysis-Pushover (Sap 2000)suman33100% (2)
- Speed Control of Steel Rolling Mill Using Neural Network: January 2006Документ6 страницSpeed Control of Steel Rolling Mill Using Neural Network: January 2006Pranati MishraОценок пока нет
- Analysis and Diagnosis of The Different Defects of The Bearings and Gearings by Vibration AnalysisДокумент6 страницAnalysis and Diagnosis of The Different Defects of The Bearings and Gearings by Vibration AnalysisJournal of Computer Science and EngineeringОценок пока нет
- A Robotic Ball Balancing Beam: Jeff Lieberman February 10, 2004Документ16 страницA Robotic Ball Balancing Beam: Jeff Lieberman February 10, 2004Anum AhmedОценок пока нет
- Lec3 - Resonance - Detuning & DecouplingДокумент21 страницаLec3 - Resonance - Detuning & DecouplingAshish ThakurОценок пока нет
- Block FoundationДокумент16 страницBlock FoundationMai Kawayapanik100% (7)
- DampingДокумент24 страницыDampingKarthiik88Оценок пока нет
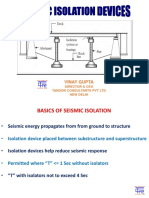
- Lecture 8 - MR Vinay Gupta On Seicmic Isolation DevicesДокумент59 страницLecture 8 - MR Vinay Gupta On Seicmic Isolation DevicesSulabh GuptaОценок пока нет
- Short CircuitДокумент154 страницыShort CircuitRichard VizcarraОценок пока нет
- Bab Elektrik: Suatu PengenalanДокумент82 страницыBab Elektrik: Suatu PengenalanSeindahNyaОценок пока нет
- Dynamic AnalysisДокумент21 страницаDynamic Analysisxion_mew2100% (2)
- Industrial Elecs Lecture PDFДокумент94 страницыIndustrial Elecs Lecture PDFJaneОценок пока нет
- Maglev Blood PumpsДокумент33 страницыMaglev Blood Pumpsharis shehzadОценок пока нет
- Civil Engineering Applications of Vibration Control (Structural Control)Документ27 страницCivil Engineering Applications of Vibration Control (Structural Control)Vijay AravindОценок пока нет
- Belt Conveyor Gallery Analysis and DesignДокумент73 страницыBelt Conveyor Gallery Analysis and Designtabloid07100% (1)
- Diskrete-Cotinuum Methods Application For Rotating Machine-Absorber Interaction AnalysisДокумент4 страницыDiskrete-Cotinuum Methods Application For Rotating Machine-Absorber Interaction AnalysisJeffrey StuartОценок пока нет
- MEMS GyroscopeДокумент39 страницMEMS GyroscopeShobhit Yadav100% (4)
- Insocoat: - Electrically Insulated Rolling BearingsДокумент12 страницInsocoat: - Electrically Insulated Rolling Bearingsiyilmaz1Оценок пока нет
- On-Chip Interconnect Analysis and Evaluation of Delay, Power, and Bandwidth Metrics Under Different Design GoalsДокумент11 страницOn-Chip Interconnect Analysis and Evaluation of Delay, Power, and Bandwidth Metrics Under Different Design GoalsSwati MattaОценок пока нет
- Strip Thickness Control of Cold Rolling MillДокумент7 страницStrip Thickness Control of Cold Rolling MillSteve KabbisОценок пока нет
- Presentation On Industrial AutomationДокумент42 страницыPresentation On Industrial AutomationIti AgarwalОценок пока нет
- Bus Suspension SystemДокумент28 страницBus Suspension SystemNor Diyana AhmadОценок пока нет
- SDOFДокумент107 страницSDOFMohammed B TuseОценок пока нет
- Rotational Plant: Read The Description of The Experimental Rotational PlantДокумент19 страницRotational Plant: Read The Description of The Experimental Rotational PlantPrabhakaran DakshinamurthyОценок пока нет
- Plastic AnalysisДокумент37 страницPlastic AnalysisChan Keng ChunОценок пока нет
- Final SeminarДокумент47 страницFinal SeminarGopal KondaguntaОценок пока нет
- Energy Absorption of Al HoneycombДокумент32 страницыEnergy Absorption of Al HoneycombakzhОценок пока нет
- Modeling of Mechanical SystemsДокумент99 страницModeling of Mechanical SystemsDontKnowwОценок пока нет
- Causes of Vibration in Machinescauses of Vibration in MachinesДокумент5 страницCauses of Vibration in Machinescauses of Vibration in MachinessisayОценок пока нет
- MEL311Документ281 страницаMEL311Shiri ShaОценок пока нет
- Active Magnetic BearingsДокумент14 страницActive Magnetic BearingsNikhil PasariОценок пока нет
- The Application of Energy Dissipating Damping Devices To An Engineered Structure or MechanismДокумент60 страницThe Application of Energy Dissipating Damping Devices To An Engineered Structure or Mechanismle ingénieurОценок пока нет
- Insocoat: - Electrically Insulated Rolling BearingsДокумент12 страницInsocoat: - Electrically Insulated Rolling Bearingsmsb42Оценок пока нет
- Selection of Switchyard EquipmentДокумент64 страницыSelection of Switchyard EquipmentKunzes Dolkar100% (2)
- Vibration Isolation - Mounting SystemsДокумент67 страницVibration Isolation - Mounting Systemsnaveenmg201100% (1)
- Simulation & Modeling of BLDC MotorДокумент20 страницSimulation & Modeling of BLDC Motorsam clastineОценок пока нет
- Presentation On Coil DesignДокумент29 страницPresentation On Coil Designpriyanka tiwariОценок пока нет
- Semi-Active Suspension Control Design for VehiclesОт EverandSemi-Active Suspension Control Design for VehiclesРейтинг: 5 из 5 звезд5/5 (1)
- Energetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationОт EverandEnergetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationОценок пока нет
- Introduction to Power System ProtectionОт EverandIntroduction to Power System ProtectionРейтинг: 5 из 5 звезд5/5 (1)
- 110 Waveform Generator Projects for the Home ConstructorОт Everand110 Waveform Generator Projects for the Home ConstructorРейтинг: 4 из 5 звезд4/5 (1)
- It Is Quite Another Electricity: Transmitting by One Wire and Without GroundingОт EverandIt Is Quite Another Electricity: Transmitting by One Wire and Without GroundingОценок пока нет
- Fact sheet on establishing a profitable snail farmДокумент4 страницыFact sheet on establishing a profitable snail farmFelipe Soares MaiaОценок пока нет
- Brunch: Menu OnlineДокумент1 страницаBrunch: Menu OnlineFelipe Soares MaiaОценок пока нет
- F - Physically Based Modeling, Principles and Practice - Constrained DynamicsДокумент13 страницF - Physically Based Modeling, Principles and Practice - Constrained DynamicsFelipe Soares MaiaОценок пока нет
- Bearing Mounting Methods. Métodos de Montaje de Rodamientos SKFДокумент12 страницBearing Mounting Methods. Métodos de Montaje de Rodamientos SKFTeckelino100% (1)
- C - Physically Based Modeling, Principles and Practice - Particle System DynamicsДокумент13 страницC - Physically Based Modeling, Principles and Practice - Particle System DynamicsFelipe Soares MaiaОценок пока нет
- E - Physically Based Modeling, Principles and Practice - Implicit Methods For Differential EquationsДокумент5 страницE - Physically Based Modeling, Principles and Practice - Implicit Methods For Differential EquationsFelipe Soares MaiaОценок пока нет
- DiffEQ Basics NotesbДокумент9 страницDiffEQ Basics Notesbchristopher_kephart1Оценок пока нет
- Precision Machine Design: Topic 19 Power Transmission System RequirementsДокумент26 страницPrecision Machine Design: Topic 19 Power Transmission System RequirementsFelipe Soares MaiaОценок пока нет
- Topic 17Документ20 страницTopic 17Felipe Soares MaiaОценок пока нет
- Topic 18aДокумент24 страницыTopic 18aFelipe Soares MaiaОценок пока нет
- Topic 18cДокумент5 страницTopic 18cFelipe Soares MaiaОценок пока нет
- Topic 11Документ41 страницаTopic 11Felipe Soares MaiaОценок пока нет
- Topic 18aДокумент24 страницыTopic 18aFelipe Soares MaiaОценок пока нет
- Topic 18bДокумент25 страницTopic 18bFelipe Soares MaiaОценок пока нет
- Linear GuidesДокумент76 страницLinear GuidesFelipe Soares MaiaОценок пока нет
- Entrelec DIN RailsДокумент5 страницEntrelec DIN RailsFelipe Soares MaiaОценок пока нет
- Topic 1Документ42 страницыTopic 1Felipe Soares MaiaОценок пока нет
- Topic 4Документ35 страницTopic 4Felipe Soares MaiaОценок пока нет