Вам также может понравиться
- 09B 26 00 A3 Sheet 02Документ1 страница09B 26 00 A3 Sheet 02Leonardo PereiraОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- 09B 26 00 A3 Sheet 01Документ1 страница09B 26 00 A3 Sheet 01Leonardo PereiraОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- 09B 26 00 A3 Sheet 03Документ1 страница09B 26 00 A3 Sheet 03Leonardo PereiraОценок пока нет
- ClarkeMacCann2016 PDFДокумент23 страницыClarkeMacCann2016 PDFLeonardo PereiraОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- 09B 26 00 A3 Sheet 05Документ1 страница09B 26 00 A3 Sheet 05Leonardo PereiraОценок пока нет
- Collector Test Method Under Quasi-Dynamic Conditions According To The European Standard EN 12975-2Документ0 страницCollector Test Method Under Quasi-Dynamic Conditions According To The European Standard EN 12975-2Leonardo PereiraОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Espacenet Guide Mar 2013Документ8 страницEspacenet Guide Mar 2013Leonardo PereiraОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- ABB Water MotorДокумент16 страницABB Water MotorHenry ChokieОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- MMUP Electronics V1.7 - With Answers - PDF - Bipolar Junction Transistor - Electric MotorДокумент193 страницыMMUP Electronics V1.7 - With Answers - PDF - Bipolar Junction Transistor - Electric MotorKanhaiya JhaОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Army TM 9-2320-361-20p Air Force To 36a12-1b-1114Документ1 188 страницArmy TM 9-2320-361-20p Air Force To 36a12-1b-1114wetface100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- PRASHANTДокумент2 страницыPRASHANTdevan gandhiОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Valves. Valves and Fittings Pressure Drop CoefficientsДокумент270 страницValves. Valves and Fittings Pressure Drop CoefficientsJMV100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- B10 1130 Boron Steel Heattreated Before and After StampingДокумент15 страницB10 1130 Boron Steel Heattreated Before and After Stamping3MECH015 Bhavatharan SОценок пока нет
- AGP PWT - WPM Presentation by AILLC (20th Sep 2022) - EngineeringДокумент4 страницыAGP PWT - WPM Presentation by AILLC (20th Sep 2022) - EngineeringsudsОценок пока нет
- Flue Gas Analyzer O&M Manual ROENДокумент2 353 страницыFlue Gas Analyzer O&M Manual ROENAnonymous bSpP1m8j0nОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
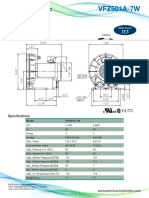
- Fuji Electric VFZ501A 7W DatasheetДокумент2 страницыFuji Electric VFZ501A 7W Datasheetghmp123Оценок пока нет
- Assembly and Disaassembly of PumpsДокумент5 страницAssembly and Disaassembly of Pumpsshin deiru100% (1)
- Fabrication of Turbocharger For Two Wheeler: Ahir Nischal A, Sofia Ali A, Darshan S Shah, Sneh R PrajapatiДокумент8 страницFabrication of Turbocharger For Two Wheeler: Ahir Nischal A, Sofia Ali A, Darshan S Shah, Sneh R PrajapatiDeepak sutarОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Pressure Form Maint RepairДокумент1 страницаPressure Form Maint RepairJong Ponciano IIIОценок пока нет
- Brochure ES-220 UHP Electric Skids PDFДокумент2 страницыBrochure ES-220 UHP Electric Skids PDFvenky4025Оценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- C 20 MC 3 4 SemДокумент53 страницыC 20 MC 3 4 SemK Kartik KartikОценок пока нет
- IcatДокумент122 страницыIcatViraj ParmarОценок пока нет
- Electric Feed Systems For Liquid Propellant Rocket Engines PDFДокумент178 страницElectric Feed Systems For Liquid Propellant Rocket Engines PDFandradesosОценок пока нет
- Innovation by Experience: Lo Hacemos SencilloДокумент36 страницInnovation by Experience: Lo Hacemos SencilloDejan DosljakОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Ujwal Steel Introduction LetterДокумент4 страницыUjwal Steel Introduction LettersamОценок пока нет
- 下载Документ4 страницы下载Mars JackОценок пока нет
- Well Rounded.: 360 CassetteДокумент12 страницWell Rounded.: 360 Cassettetafadzwa simbiОценок пока нет
- Cummins D1703 Engine Parts Catalog PDFДокумент72 страницыCummins D1703 Engine Parts Catalog PDFxxxxxxxxxxxxxxxxxxx100% (2)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Moment VectorДокумент9 страницMoment VectorGlen GulayОценок пока нет
- ASME Boiler and Pressure Vessel Code, Section III NF, EditioДокумент101 страницаASME Boiler and Pressure Vessel Code, Section III NF, EditiorazvannuОценок пока нет
- Datasheet (API 610 - 1 Page)Документ8 страницDatasheet (API 610 - 1 Page)Rudin Fahrudin RahmanОценок пока нет
- Numerical Cave Propagation SimulationsДокумент14 страницNumerical Cave Propagation SimulationswalterloliОценок пока нет
- 29 V3800dit 26Документ2 страницы29 V3800dit 26Hector Dongo ArrayanОценок пока нет
- For Cylinders and Blocks: Compression MachinesДокумент4 страницыFor Cylinders and Blocks: Compression MachineshistoОценок пока нет
- Retentor Din 3760Документ13 страницRetentor Din 3760Marcelo Godinho BatistaОценок пока нет
- Ch06 Hardware Components For Automation 14-210317Документ38 страницCh06 Hardware Components For Automation 14-210317MONICA YUNITA ,100% (2)
- Installation, Operation and Maintenance Instructions Stainless Steel, Liquid Ring Vacuum PumpsДокумент28 страницInstallation, Operation and Maintenance Instructions Stainless Steel, Liquid Ring Vacuum PumpspinplataОценок пока нет