Вам также может понравиться
- Control DC ServoДокумент6 страницControl DC Servopham hoang quanОценок пока нет
- Open Loop Closed LoopДокумент12 страницOpen Loop Closed LoopKarthik RamОценок пока нет
- Micro-Chaos in Digital Control: Summary. in This Paper We Analyze A Model For The Effect of Digital Control On OneДокумент34 страницыMicro-Chaos in Digital Control: Summary. in This Paper We Analyze A Model For The Effect of Digital Control On OneGeorge HallerОценок пока нет
- TAN Activity2 Section5.1Документ16 страницTAN Activity2 Section5.1ceferinotanОценок пока нет
- Summary of Topic Covered in ECE408Документ89 страницSummary of Topic Covered in ECE408Nishikata ManipolОценок пока нет
- Ic6501 Control SystemsДокумент67 страницIc6501 Control SystemsK.Sushita VISTASОценок пока нет
- Pole ZeroДокумент7 страницPole ZerosedraОценок пока нет
- HET312 NotesДокумент41 страницаHET312 NotesTing SamuelОценок пока нет
- Tutorial 5Документ2 страницыTutorial 5Gaurav AОценок пока нет
- Modern Control Theory and It'S ApplicationsДокумент9 страницModern Control Theory and It'S ApplicationsMohamed ShamseldeinОценок пока нет
- Laboratory Activity 2Документ12 страницLaboratory Activity 2Johaira Maute100% (1)
- Antenna Azimuth Position Control System VerificationДокумент4 страницыAntenna Azimuth Position Control System VerificationmsbajoriОценок пока нет
- On An Optimal Linear Control of A Chaotic Non-Ideal Duffing SystemДокумент7 страницOn An Optimal Linear Control of A Chaotic Non-Ideal Duffing SystemJefferson MartinezОценок пока нет
- Lab # 5 Modeling of Translational Mechanical System and To Calculate Its Various ResponsesДокумент18 страницLab # 5 Modeling of Translational Mechanical System and To Calculate Its Various Responseszain islamОценок пока нет
- Controlengg Compiled Sridar (Session 1 8)Документ60 страницControlengg Compiled Sridar (Session 1 8)Prem T RajuОценок пока нет
- Vibration Analysis of Discrete One and Two Degree of Freedom SystemsДокумент11 страницVibration Analysis of Discrete One and Two Degree of Freedom SystemsNaveen FootyОценок пока нет
- Adaptive Control Theory: IntroductionДокумент19 страницAdaptive Control Theory: IntroductionThanh NguyenОценок пока нет
- Modeling and Digital Simulation Case Studies: 3.1 Pre-Lab AssignmentДокумент13 страницModeling and Digital Simulation Case Studies: 3.1 Pre-Lab AssignmentLittle_skipОценок пока нет
- (Muchong - Com) The Fundamentals of Modal Testing PDFДокумент56 страниц(Muchong - Com) The Fundamentals of Modal Testing PDFwanglei2112221990Оценок пока нет
- Quiz1解答Документ10 страницQuiz1解答Fang ChynОценок пока нет
- DStext 2015Документ28 страницDStext 2015Daniela AlvaradoОценок пока нет
- Dynamic System Modeling and Control - Hugh JackДокумент1 016 страницDynamic System Modeling and Control - Hugh Jackjiugarte1100% (2)
- Ball & Beam DocumentДокумент8 страницBall & Beam DocumentJorge PorrasОценок пока нет
- Control Engg NotesДокумент58 страницControl Engg NotesTudor Octavian RusuОценок пока нет
- Equations of MotionДокумент6 страницEquations of MotionDharshan KofiОценок пока нет
- NPTEL - Mechanical Engineering - Vibration ControlДокумент10 страницNPTEL - Mechanical Engineering - Vibration Control8104772799Оценок пока нет
- Control Systems 3B Lecture Notes MBauer 2Документ6 страницControl Systems 3B Lecture Notes MBauer 2Nceba Perseverance MbeweОценок пока нет
- Control SystemДокумент78 страницControl SystemsahilmirОценок пока нет
- Laplace Transform (Notes)Документ23 страницыLaplace Transform (Notes)Alex OsesОценок пока нет
- Vibration AnalysisДокумент18 страницVibration AnalysisSangolla NarahariОценок пока нет
- EE132 Lab1 OL Vs CLДокумент3 страницыEE132 Lab1 OL Vs CLthinkberry22Оценок пока нет
- Dynamics of A Mass-Spring-Pendulum System With Vastly Different FrequenciesДокумент6 страницDynamics of A Mass-Spring-Pendulum System With Vastly Different FrequenciesvertugoОценок пока нет
- Week 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Документ5 страницWeek 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Michael LiОценок пока нет
- Experiment # 3 Mathematical Modelling and Simulation of Mechanical SystemsДокумент7 страницExperiment # 3 Mathematical Modelling and Simulation of Mechanical SystemsFahad AneebОценок пока нет
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFДокумент183 страницыControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Документ183 страницыControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Anik PaulОценок пока нет
- Describing Function Analysis of Systems With Impacts and BacklashДокумент16 страницDescribing Function Analysis of Systems With Impacts and BacklashmustaafaaОценок пока нет
- Exp01 EEE318Документ7 страницExp01 EEE318Abid AbdullahОценок пока нет
- Preconditioned Dynamic Iteration For Coupled Differential-Algebraic SystemsДокумент25 страницPreconditioned Dynamic Iteration For Coupled Differential-Algebraic SystemsJese MadridОценок пока нет
- Modeling, Simulation and Control of A Robotic ArmДокумент7 страницModeling, Simulation and Control of A Robotic ArmaseptaОценок пока нет
- Modeling, Simulation and Control of A Robotic Arm PDFДокумент7 страницModeling, Simulation and Control of A Robotic Arm PDFshivaramreddyОценок пока нет
- L05 SimpleOscillationsДокумент14 страницL05 SimpleOscillationsliuzihan32320Оценок пока нет
- Dynamics and Vibrations - Notes - Free Undamped VibrationsДокумент14 страницDynamics and Vibrations - Notes - Free Undamped VibrationsPhatechand NaikОценок пока нет
- Tutorial On Input Shaping/Time Delay Control of Maneuvering Flexible StructuresДокумент16 страницTutorial On Input Shaping/Time Delay Control of Maneuvering Flexible Structures원성규Оценок пока нет
- Compendium 2Документ6 страницCompendium 2m.jovanoskaОценок пока нет
- ServoДокумент24 страницыServoahmedhamdiОценок пока нет
- Analysis of Automobile SuspensionДокумент13 страницAnalysis of Automobile SuspensionAfeez AzizОценок пока нет
- On The Stabilization and Stability Robustness Against Small Delays of Some Damped Wave EquationsДокумент5 страницOn The Stabilization and Stability Robustness Against Small Delays of Some Damped Wave EquationsInst Robert Díaz RiemannОценок пока нет
- STRC201 Sdof JMWBДокумент99 страницSTRC201 Sdof JMWBJura PateregaОценок пока нет
- Ex - Sloution CompendiumДокумент115 страницEx - Sloution CompendiumAli Jaber Al QattanОценок пока нет
- Lecture Chapter1 8newДокумент188 страницLecture Chapter1 8newDinuka RavimalОценок пока нет
- Draft Dynamics 6june2022Документ85 страницDraft Dynamics 6june2022MenstraОценок пока нет
- Exercises in Nonlinear Control SystemsДокумент99 страницExercises in Nonlinear Control SystemsRiccardo M.G. Ferrari100% (2)
- Longitudinal Vibration BarsДокумент83 страницыLongitudinal Vibration BarsGerson Cordoba Barco75% (4)
- Triple PendulumДокумент9 страницTriple PendulumSalvador SilveyraОценок пока нет
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11От EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Оценок пока нет
- Harnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingОт EverandHarnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingОценок пока нет
- Reactive Oxygen Species: Signaling Between Hierarchical Levels in PlantsОт EverandReactive Oxygen Species: Signaling Between Hierarchical Levels in PlantsFranz-Josef SchmittОценок пока нет
- Plasticity Interaction FactorДокумент1 страницаPlasticity Interaction FactorAnonymous UoHUagОценок пока нет
- Applying ASME Boiler Code To Steam Generation Systems - Chemical EngineeringДокумент5 страницApplying ASME Boiler Code To Steam Generation Systems - Chemical EngineeringAnonymous UoHUagОценок пока нет
- Technical BriefsДокумент2 страницыTechnical BriefsAnonymous UoHUagОценок пока нет
- ASME Local DamageДокумент1 страницаASME Local DamageAnonymous UoHUagОценок пока нет
- Abaqus UnitsДокумент8 страницAbaqus UnitsAnonymous UoHUagОценок пока нет
- Residual Welding Stresses and Distortions: 1.1 Simple Examples of ThermoelasticityДокумент27 страницResidual Welding Stresses and Distortions: 1.1 Simple Examples of ThermoelasticityAnonymous UoHUagОценок пока нет
- Determination of Vessel Weight and Coordinates of Its Centre of Gravity by Using of Elastic Inflatable TanksДокумент4 страницыDetermination of Vessel Weight and Coordinates of Its Centre of Gravity by Using of Elastic Inflatable TanksAnonymous UoHUagОценок пока нет
- Interpreting FEA Stresses - Primary or Secondary - Boiler and Pressure Vessel Engineering - Eng-TipsДокумент4 страницыInterpreting FEA Stresses - Primary or Secondary - Boiler and Pressure Vessel Engineering - Eng-TipsAnonymous UoHUagОценок пока нет
- Discussion 1 - Piping Loads Vs Allowable Nozzle LoadsДокумент5 страницDiscussion 1 - Piping Loads Vs Allowable Nozzle LoadsAnonymous UoHUagОценок пока нет
- Elastic) Plastic Solid Disk With Nonuniform Heat Source Subjected To External PressureДокумент12 страницElastic) Plastic Solid Disk With Nonuniform Heat Source Subjected To External PressureAnonymous UoHUagОценок пока нет
- T Hick-Walled Vessels: PressureДокумент1 страницаT Hick-Walled Vessels: PressureAnonymous UoHUagОценок пока нет
- Rubber Covered Rolls-The Nonlinear Elastic Problem: R. C. BatraДокумент5 страницRubber Covered Rolls-The Nonlinear Elastic Problem: R. C. BatraAnonymous UoHUagОценок пока нет
- Von Mises' Yield Criterion and Nonlinearly Hardening Rotating ShaftsДокумент17 страницVon Mises' Yield Criterion and Nonlinearly Hardening Rotating ShaftsAnonymous UoHUagОценок пока нет
- Elastic-Plastic Deformations of Rotatingvariable Thickness Annular Disks With Free, Pressurized and Radially Constrained Boundary ConditionsДокумент25 страницElastic-Plastic Deformations of Rotatingvariable Thickness Annular Disks With Free, Pressurized and Radially Constrained Boundary ConditionsAnonymous UoHUagОценок пока нет
- Elastic-Plastic Stress Distribution in A Plastically Anisotropic Rotating DiskДокумент8 страницElastic-Plastic Stress Distribution in A Plastically Anisotropic Rotating DiskAnonymous UoHUagОценок пока нет
- Floquet Modal Analysis of A Teetered-Rotor Wind Turbine: Karl StolДокумент8 страницFloquet Modal Analysis of A Teetered-Rotor Wind Turbine: Karl StolAnonymous UoHUagОценок пока нет
- Ammonia Converter FailureДокумент15 страницAmmonia Converter FailureAnonymous UoHUagОценок пока нет
- Analytical Approach in Autofrettaged Spherical Pressure Vessels Considering The Bauschinger EffectДокумент9 страницAnalytical Approach in Autofrettaged Spherical Pressure Vessels Considering The Bauschinger EffectAnonymous UoHUagОценок пока нет
- Fluid Catalytic Cracking (FCC) Transfer Line Flexibility - Analysis and Design Considerations PDFДокумент2 страницыFluid Catalytic Cracking (FCC) Transfer Line Flexibility - Analysis and Design Considerations PDFAnonymous UoHUagОценок пока нет
- Evaluating SMAW Electrodes For Coke Drum Construction: Fig. 1 - Coke Drum Vessels in Delayed Coker Unit 1Документ4 страницыEvaluating SMAW Electrodes For Coke Drum Construction: Fig. 1 - Coke Drum Vessels in Delayed Coker Unit 1Anonymous UoHUagОценок пока нет
- Ferrite Number Check For Dissimilar Welds PDFДокумент4 страницыFerrite Number Check For Dissimilar Welds PDFAnonymous UoHUagОценок пока нет
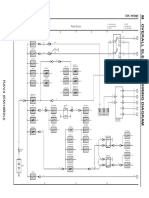
- Rav 4 2011 Overall+WiringДокумент186 страницRav 4 2011 Overall+WiringAnonymous UoHUagОценок пока нет
- Bessel Functions (Guide)Документ22 страницыBessel Functions (Guide)Hoang Phan Thanh100% (1)
- P-752 Unit 2 FundamentalsДокумент88 страницP-752 Unit 2 FundamentalsIfsyahestiОценок пока нет
- Damping MeasurementsДокумент50 страницDamping MeasurementsWon-young Seo100% (1)
- Damped OscillationsДокумент8 страницDamped OscillationsjwakooliОценок пока нет
- Damper OilДокумент89 страницDamper Oilsuhas110Оценок пока нет
- Time Domain Analysis of Control Systems: Vikas D. HajareДокумент65 страницTime Domain Analysis of Control Systems: Vikas D. HajareVikas HajareОценок пока нет
- AT6302 - Mahanics of MachinesДокумент19 страницAT6302 - Mahanics of Machinesrajasamygopal0% (1)
- Concerning The Excitation of Electrical Waves Through Parameter Changes English Translation 1934Документ27 страницConcerning The Excitation of Electrical Waves Through Parameter Changes English Translation 1934zonetrekОценок пока нет
- 9 ContactmodelingДокумент56 страниц9 Contactmodelinganirudh666Оценок пока нет
- Ib Phys DC ESQ C 231118 135711Документ32 страницыIb Phys DC ESQ C 231118 135711sammeaan khanОценок пока нет
- College of Technology - Riyadh: Kingdom of Saudi ArabiaДокумент87 страницCollege of Technology - Riyadh: Kingdom of Saudi Arabiamohamed fattal100% (1)
- Control 2Документ87 страницControl 2kibrom atsbhaОценок пока нет
- Novel Sensors and SensingДокумент285 страницNovel Sensors and Sensinggoguxxl3Оценок пока нет
- EEL 3123 Lab Manual - PDF LABДокумент79 страницEEL 3123 Lab Manual - PDF LABkamalОценок пока нет
- Time History Analysis ParametersДокумент19 страницTime History Analysis ParametersAsia WardОценок пока нет
- Fundamentals of Earthquake EngineeringДокумент12 страницFundamentals of Earthquake EngineeringAyel Cejas Costiniano29% (14)
- Week 4 - General Physics Damped Oscillations PDFДокумент77 страницWeek 4 - General Physics Damped Oscillations PDFMary Rose Jusay GumapacОценок пока нет
- Advanced Imaging OpticsДокумент70 страницAdvanced Imaging Opticsker11enОценок пока нет
- Inelastic Time History AnalysisДокумент45 страницInelastic Time History AnalysisZul BahriОценок пока нет
- 0505swan A Practical Review of Rotating Machinery Critical Speeds and ModesДокумент8 страниц0505swan A Practical Review of Rotating Machinery Critical Speeds and ModestrebeardОценок пока нет
- Belimo Vav ControllerДокумент9 страницBelimo Vav ControllerckyprianouОценок пока нет
- QM - Chapter 4 - Harmonic OscillatorДокумент50 страницQM - Chapter 4 - Harmonic Oscillator12ew1wОценок пока нет
- Power Systems Control and Stability - 2ed.2003Документ689 страницPower Systems Control and Stability - 2ed.2003Jaime ContrerasОценок пока нет
- Chapter 3. Introduction To Molecular Vibrations 3.1 OverviewДокумент6 страницChapter 3. Introduction To Molecular Vibrations 3.1 OverviewpranavОценок пока нет
- Level 5 Advanced Technician Diploma in Electrical and Electronic Engineering v2Документ71 страницаLevel 5 Advanced Technician Diploma in Electrical and Electronic Engineering v2D Gihan Perera75% (4)
- A2 Chapter 14 OscillationДокумент61 страницаA2 Chapter 14 OscillationkwaikunОценок пока нет
- Damped OscillationsДокумент7 страницDamped OscillationsSharma AnirudhОценок пока нет
- Parameters Measurement in TheДокумент46 страницParameters Measurement in TheivanmjwОценок пока нет
- CP Tutorial1Документ6 страницCP Tutorial1naruatОценок пока нет
- Curriculum PhysicsДокумент33 страницыCurriculum PhysicsMahad ArifОценок пока нет