Вам также может понравиться
- El Espiritu Del Barroco PDFДокумент94 страницыEl Espiritu Del Barroco PDFJoel Reyes HernandezОценок пока нет
- PDF Aparellaje Electrico MTДокумент91 страницаPDF Aparellaje Electrico MTelectrotecnia_tvpcОценок пока нет
- Instalaciones de TelecomunicacionesДокумент51 страницаInstalaciones de Telecomunicacioneselectrotecnia_tvpcОценок пока нет
- Manual 4 RuidoДокумент124 страницыManual 4 RuidoMaritza UreñaОценок пока нет
- Iberdrola Instalaciones de EnlaceДокумент40 страницIberdrola Instalaciones de Enlaceelectrotecnia_tvpcОценок пока нет
- Trucos fsx-1 PDFДокумент4 страницыTrucos fsx-1 PDFelectrotecnia_tvpcОценок пока нет
- Caracteristicas Construcctivas y de Funcionamiento de Los Interruptores Automaticos - HagerДокумент5 страницCaracteristicas Construcctivas y de Funcionamiento de Los Interruptores Automaticos - Hagerelectrotecnia_tvpcОценок пока нет
- Sistemas ElectromecanicosДокумент57 страницSistemas Electromecanicoselectrotecnia_tvpcОценок пока нет
- Laqumicadelasplantaspresentacin 101026114906 Phpapp01Документ92 страницыLaqumicadelasplantaspresentacin 101026114906 Phpapp01electrotecnia_tvpcОценок пока нет
- Cimentaciones de Concreto Como Electrodos de Puesta A TierraДокумент26 страницCimentaciones de Concreto Como Electrodos de Puesta A Tierraelectrotecnia_tvpcОценок пока нет
- Calefaccion ElectricaДокумент87 страницCalefaccion Electricaelectrotecnia_tvpcОценок пока нет
- Aprender InglesДокумент16 страницAprender Ingleselectrotecnia_tvpcОценок пока нет
- Quiz 2Документ10 страницQuiz 2Cristopher OchoaОценок пока нет
- Manual de Metodología de La Investigación JurídicaДокумент87 страницManual de Metodología de La Investigación JurídicaLucíaОценок пока нет
- Orientaciones Semana de La Seguridad Escolar y ParvulariaДокумент14 страницOrientaciones Semana de La Seguridad Escolar y ParvulariaNorman CarvajalОценок пока нет
- 2022-Tarea Numero 2Документ4 страницы2022-Tarea Numero 2Aranzazu Vizguerra GarciaОценок пока нет
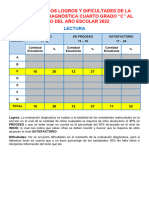
- Analisis de Los Logros y Dificultades de La Evaluación Diagnostica Inicio 2022Документ4 страницыAnalisis de Los Logros y Dificultades de La Evaluación Diagnostica Inicio 2022eledega22Оценок пока нет
- Manual de Usuario Proveedor - GRUPO ROMEROДокумент17 страницManual de Usuario Proveedor - GRUPO ROMEROJavier JMОценок пока нет
- Cultura EmprendedoraДокумент20 страницCultura EmprendedoraAmalia De Los Angeles Hernandez MendozaОценок пока нет
- Metrica Griega 1984-2004Документ15 страницMetrica Griega 1984-2004egarcian100% (1)
- Joan CostaДокумент2 страницыJoan Costalibu50% (1)
- Molino para Editar y Mejorar Su ContenidoДокумент85 страницMolino para Editar y Mejorar Su ContenidoAriel AyalaОценок пока нет
- Informe Del Ensayo de Calicata y CuarteoДокумент8 страницInforme Del Ensayo de Calicata y CuarteoHetson Pillaca ChiquillanОценок пока нет
- VF Declaración 2701 Isapres de ChileДокумент1 страницаVF Declaración 2701 Isapres de ChileContacto Ex-AnteОценок пока нет
- Orden de Matricula Nit: 860401734-9 PBX: 3813222 Fax: 3347101Документ1 страницаOrden de Matricula Nit: 860401734-9 PBX: 3813222 Fax: 3347101Diana Elizabeth Proano FragaОценок пока нет
- Eleccion de Tuberias P.Документ15 страницEleccion de Tuberias P.Majos NoriegaОценок пока нет
- PDF Diagramas Saveirogolvoyage 16 Ccra - CompressДокумент16 страницPDF Diagramas Saveirogolvoyage 16 Ccra - CompressOscar RamirezОценок пока нет
- Practica VLSM Clase CДокумент9 страницPractica VLSM Clase CAguilera Barajas José JoshuaОценок пока нет
- Comentario A La Ley 26727Документ15 страницComentario A La Ley 26727nocherenseОценок пока нет
- Historia de Yotala PDFДокумент14 страницHistoria de Yotala PDFamy0% (1)
- Dictamen de Auto de Verificación de Sentencia No. 679-18-JP21Документ29 страницDictamen de Auto de Verificación de Sentencia No. 679-18-JP21Santiago VillafuerteОценок пока нет
- Auditoria 1Документ3 страницыAuditoria 1Alfredo Misael Galan GarciaОценок пока нет
- Angenot-2010-El-discurso-social Cap 1Документ29 страницAngenot-2010-El-discurso-social Cap 1Karen ArgañarazОценок пока нет
- Apatheia - Un Estado de Conciencia para El Estilo de VidaДокумент41 страницаApatheia - Un Estado de Conciencia para El Estilo de Vidaburgundio63Оценок пока нет
- SAP Descripcion Nro Fabricante Ubicación Necesario % Acumulado VAL. INVДокумент1 страницаSAP Descripcion Nro Fabricante Ubicación Necesario % Acumulado VAL. INVBenyamin Leonardo Zuniga MarinОценок пока нет
- Investigación MicrosocialДокумент17 страницInvestigación MicrosocialMynor MartínezОценок пока нет
- MÓDULO 1 Unidad 7 Workbook (Test Heridas de La Infancia)Документ8 страницMÓDULO 1 Unidad 7 Workbook (Test Heridas de La Infancia)Mía CamarenaОценок пока нет
- Capitulo 08 Dosificaciones para Las Mezclas de ConcretoДокумент31 страницаCapitulo 08 Dosificaciones para Las Mezclas de ConcretoAngie CaroОценок пока нет
- Tareas HUДокумент12 страницTareas HUmiguel angel molina salasОценок пока нет
- Capítulo IV - Los Números ComplejosДокумент26 страницCapítulo IV - Los Números ComplejosKarina San MartinОценок пока нет
- Matemáticas Grado 8 2021 DOCENTE: Miguel Antonio Aguilar EspinelДокумент9 страницMatemáticas Grado 8 2021 DOCENTE: Miguel Antonio Aguilar Espineljuan roaОценок пока нет