Вам также может понравиться
- Esa TrevДокумент12 страницEsa TrevPeejay Ollabrac100% (1)
- 4415 3000 Solved Problems in Electric Circuits SchaumsДокумент14 страниц4415 3000 Solved Problems in Electric Circuits Schaumsalfred calaunanОценок пока нет
- Performance of Diversity Combining Techniques For Antenna ArraysДокумент4 страницыPerformance of Diversity Combining Techniques For Antenna ArraysTushar SaxenaОценок пока нет
- Cable CalculationДокумент6 страницCable CalculationparameshvkrОценок пока нет
- Emotron Fdu2 0 - Manual - 01 5325 01r5.enДокумент270 страницEmotron Fdu2 0 - Manual - 01 5325 01r5.enImran Ullah KhanОценок пока нет
- Pilot Optimization and Channel Estimation For Multiuser Massive MIMO SystemsДокумент6 страницPilot Optimization and Channel Estimation For Multiuser Massive MIMO SystemsQuả Ớt Leo-neeОценок пока нет
- CM Kaltfl 080709Документ5 страницCM Kaltfl 080709Võ Quy QuangОценок пока нет
- How Does A Universal Motor WorkДокумент3 страницыHow Does A Universal Motor WorkJeremiah NayosanОценок пока нет
- Ofdm Channel Estimation by Singular Value Decomposition: Abstract - A New Approach To Low-Complexity ChanДокумент5 страницOfdm Channel Estimation by Singular Value Decomposition: Abstract - A New Approach To Low-Complexity ChanAlexandro PendosilioОценок пока нет
- Compressed SensingДокумент18 страницCompressed SensingRobin TimkangОценок пока нет
- HTTP Home - Agh.edu - PL Bziolko Dokuwiki Lib Exe Fetch - PHP Media Art HKДокумент4 страницыHTTP Home - Agh.edu - PL Bziolko Dokuwiki Lib Exe Fetch - PHP Media Art HKParismita GogoiОценок пока нет
- Joint Optimization of Transceivers With Fractionally Spaced EqualizersДокумент4 страницыJoint Optimization of Transceivers With Fractionally Spaced EqualizersVipin SharmaОценок пока нет
- Empirical Mode Decomposition - EMD-Based Signal FilteringДокумент7 страницEmpirical Mode Decomposition - EMD-Based Signal Filteringnadamau22633Оценок пока нет
- Coh 1Документ2 страницыCoh 1chunnumunnuОценок пока нет
- Analytical Evaluation of Finite-Difference Time-Domain Transmission Line PropertiesДокумент29 страницAnalytical Evaluation of Finite-Difference Time-Domain Transmission Line PropertiesMuntader AlshraaОценок пока нет
- MMSE Interference Suppression For Direct-Sequence Spread - Spectrum CDMAДокумент11 страницMMSE Interference Suppression For Direct-Sequence Spread - Spectrum CDMAanon_808771690Оценок пока нет
- High SNR Analysis For MIMO Broadcast Channels: Dirty Paper Coding vs. Linear PrecodingДокумент33 страницыHigh SNR Analysis For MIMO Broadcast Channels: Dirty Paper Coding vs. Linear Precodingkumaar1943Оценок пока нет
- Performance Comparison of Wavelet Packet Modulation and OFDM Over Multipath Wireless Channel With Narrowband InterferenceДокумент4 страницыPerformance Comparison of Wavelet Packet Modulation and OFDM Over Multipath Wireless Channel With Narrowband Interferencesachin10dulkarОценок пока нет
- Proposed Project Topics: Topic 1: A New Timing Recovery AlgorithmДокумент5 страницProposed Project Topics: Topic 1: A New Timing Recovery AlgorithmMohammad Junaid IqbalОценок пока нет
- Least Squared Error FIR Filter Design With Transition BandsДокумент14 страницLeast Squared Error FIR Filter Design With Transition Bandsj1o2s3eОценок пока нет
- A Systems Approach To Channel Equalization N.: Dept. 61801, MA USAДокумент6 страницA Systems Approach To Channel Equalization N.: Dept. 61801, MA USAAjinkya DeshmukhОценок пока нет
- NVH Fallstudie Frequency AnalysisДокумент5 страницNVH Fallstudie Frequency Analysisreek_bhatОценок пока нет
- Acoustic Echo Cancellation and Double Talk DetectionДокумент7 страницAcoustic Echo Cancellation and Double Talk DetectionintelheОценок пока нет
- Metaheuristic Algorithms For Frequency Assignment ProblemsДокумент4 страницыMetaheuristic Algorithms For Frequency Assignment ProblemsHenriqueDinizОценок пока нет
- Adaptive Filter Bank Modulation For Next Generation Wireless In-Home NetworksДокумент12 страницAdaptive Filter Bank Modulation For Next Generation Wireless In-Home Networkssindhur6938Оценок пока нет
- Optimal MTM Spectral Estimation Based Detection For Cognitive Radio in HDTVДокумент5 страницOptimal MTM Spectral Estimation Based Detection For Cognitive Radio in HDTVAbdul RahimОценок пока нет
- Frequency Domain EqualizerДокумент5 страницFrequency Domain EqualizerANDRETERROMОценок пока нет
- MC-CDMA With Quadrature Spreading For Wireless Communication SystemsДокумент25 страницMC-CDMA With Quadrature Spreading For Wireless Communication SystemsNageswara Rao ChallaОценок пока нет
- Blind Estimation of Carrier Frequency Offset in Multicarrier Communication SystemsДокумент3 страницыBlind Estimation of Carrier Frequency Offset in Multicarrier Communication SystemsVijay Kumar Raju VippartiОценок пока нет
- On Using Transmission Overhead Efficiently For Channel Estimation in OFDMДокумент6 страницOn Using Transmission Overhead Efficiently For Channel Estimation in OFDMAnonymous uspYoqEОценок пока нет
- Capacity and Power Allocation For Fading MIMO Channels With Channel Estimation ErrorДокумент12 страницCapacity and Power Allocation For Fading MIMO Channels With Channel Estimation ErrorNadeem PashaОценок пока нет
- MIMO Systems With Mutual Coupling - How Many Antennas To Pack Into Fixed-Length ArraysДокумент6 страницMIMO Systems With Mutual Coupling - How Many Antennas To Pack Into Fixed-Length ArraysAndrei NedelcuОценок пока нет
- Optimal STBC Precoding With Channel Covariance Feedback For Minimum Error ProbabilityДокумент18 страницOptimal STBC Precoding With Channel Covariance Feedback For Minimum Error ProbabilityManuel VasquezОценок пока нет
- Abstract 3. Power Spectral Density 4. Welch Method 5. Result 6. ConclusionДокумент10 страницAbstract 3. Power Spectral Density 4. Welch Method 5. Result 6. ConclusionSyeda AmeenaОценок пока нет
- Telecom Article A 12.2011Документ10 страницTelecom Article A 12.2011Anees SiddiquiОценок пока нет
- Battle Field Speech Enhancement Using An Efficient Unbiased Adaptive Filtering TechniqueДокумент5 страницBattle Field Speech Enhancement Using An Efficient Unbiased Adaptive Filtering Techniqueeditor9891Оценок пока нет
- Channel Estimation For Adaptive Frequency-Domain EqualizationДокумент11 страницChannel Estimation For Adaptive Frequency-Domain Equalizationअमरेश झाОценок пока нет
- Digital Equalization of Chromatic Dispersion and Polarization Mode DispersionДокумент11 страницDigital Equalization of Chromatic Dispersion and Polarization Mode DispersionAliAzarniaОценок пока нет
- Welch PSD Estimator Using Winows: SL - No. TitleДокумент11 страницWelch PSD Estimator Using Winows: SL - No. TitleSyeda AmeenaОценок пока нет
- PubDat 198202Документ4 страницыPubDat 198202deltakioОценок пока нет
- Ofdm and Ofdm Channel Estimation: Abhishek Gupta (06102298)Документ51 страницаOfdm and Ofdm Channel Estimation: Abhishek Gupta (06102298)Tejpal SinghОценок пока нет
- Compressed SensingДокумент14 страницCompressed Sensingnigel989Оценок пока нет
- Transactions Briefs: Analog Computation of Wavelet Transform Coefficients in Real-TimeДокумент4 страницыTransactions Briefs: Analog Computation of Wavelet Transform Coefficients in Real-TimeHair MorenoОценок пока нет
- Comparative Analysis Between DWT and WPD Techniques of Speech CompressionДокумент9 страницComparative Analysis Between DWT and WPD Techniques of Speech CompressionIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalОценок пока нет
- 09shin2007 An Efficient Design of Doubly SelectiveДокумент13 страниц09shin2007 An Efficient Design of Doubly SelectiveMahmud Ja'afarОценок пока нет
- An Enhanced Channel Estimation Algorithm For OFDM - Combined EM Algorithm and Polynomial FittingДокумент4 страницыAn Enhanced Channel Estimation Algorithm For OFDM - Combined EM Algorithm and Polynomial FittingShobha ShakyaОценок пока нет
- Blind Spectrum Sensing in Cognitive Radio Over Fading Channels and Frequency OffsetsДокумент14 страницBlind Spectrum Sensing in Cognitive Radio Over Fading Channels and Frequency OffsetsPankaj ShrotriyaОценок пока нет
- Application of DFT Filter Bank To Power Frequency Harmonic MeasurementДокумент5 страницApplication of DFT Filter Bank To Power Frequency Harmonic Measurementfranchisca9999Оценок пока нет
- Alam Tareq 2010Документ5 страницAlam Tareq 2010Muhammad Shoaib HassanОценок пока нет
- Progress in Electromagnetics Research, Vol. 122, 361-387, 2012Документ27 страницProgress in Electromagnetics Research, Vol. 122, 361-387, 2012hos3adel85Оценок пока нет
- Adaptive Equalization Techniques Using Recursive Least Square (RLS) AlgorithmДокумент8 страницAdaptive Equalization Techniques Using Recursive Least Square (RLS) AlgorithmVo Phong PhuОценок пока нет
- 01 Pzflex Ieee93Документ7 страниц01 Pzflex Ieee93Ridwan WkОценок пока нет
- Adaptive Filters: Angelina A. AquinoДокумент2 страницыAdaptive Filters: Angelina A. AquinoAkinoTenshiОценок пока нет
- A New BER Upper Bound For Multiuser Downlink Systems: Dianjun Chen and Takeshi Hashimoto, Member, IEEEДокумент12 страницA New BER Upper Bound For Multiuser Downlink Systems: Dianjun Chen and Takeshi Hashimoto, Member, IEEEjagadeesh jagadeОценок пока нет
- Active Antenna Selection in Multiuser MIMO CommunicationsДокумент13 страницActive Antenna Selection in Multiuser MIMO CommunicationsJaideep BoseОценок пока нет
- Farzad Etemadi, Hung-Kang Liu, Nader Bagherzadeh, Fadi J. Kurdahi December 12, 1996Документ19 страницFarzad Etemadi, Hung-Kang Liu, Nader Bagherzadeh, Fadi J. Kurdahi December 12, 1996Andrew JonesОценок пока нет
- Applying Optimum Combining To A DS/CDMA Code Diversity SystemДокумент7 страницApplying Optimum Combining To A DS/CDMA Code Diversity SystemJournal of TelecommunicationsОценок пока нет
- Statistically Adaptive Spatial Multiplexing For Time-Varying Correlated MIMO ChannelsДокумент31 страницаStatistically Adaptive Spatial Multiplexing For Time-Varying Correlated MIMO ChannelsShalini JainОценок пока нет
- Spreading Sequences For Zero-Forcing DS-CDMA Multiuser DetectorsДокумент5 страницSpreading Sequences For Zero-Forcing DS-CDMA Multiuser DetectorsGopal Jee MishraОценок пока нет
- Performance of Coarse and Fine Timing Synchronization in OFDM ReceiversДокумент5 страницPerformance of Coarse and Fine Timing Synchronization in OFDM ReceiversHossam AsranОценок пока нет
- White Paper Meshing in TD PDFДокумент17 страницWhite Paper Meshing in TD PDFTuýp Phờ NờОценок пока нет
- Adaptive Network-Based Inference System Models On Multiband Patch Antenna DesignДокумент8 страницAdaptive Network-Based Inference System Models On Multiband Patch Antenna DesignenogogoОценок пока нет
- Multiuser OFDM With Adaptive Subcarrier, Bit, and Power AllocationДокумент12 страницMultiuser OFDM With Adaptive Subcarrier, Bit, and Power Allocationsltr1234Оценок пока нет
- White Paper Meshing in TDДокумент17 страницWhite Paper Meshing in TDRaturi DeepankarОценок пока нет
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsОт EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsОценок пока нет
- DesignequationДокумент7 страницDesignequationSandeep Kr AryaОценок пока нет
- Susol RMU - E - 180702Документ28 страницSusol RMU - E - 180702Sandeep Kr Arya0% (1)
- WarningДокумент1 страницаWarningSandeep Kr AryaОценок пока нет
- BCU-02/12/22 Control Units: Hardware ManualДокумент26 страницBCU-02/12/22 Control Units: Hardware ManualSandeep Kr AryaОценок пока нет
- Fuse D PDFДокумент9 страницFuse D PDFSandeep Kr AryaОценок пока нет
- Dcs Io List: M/S Dev Priya Products Pvt. LTDДокумент12 страницDcs Io List: M/S Dev Priya Products Pvt. LTDSandeep Kr AryaОценок пока нет
- Fochxxx-Xx Du/Dt Filters: Hardware ManualДокумент30 страницFochxxx-Xx Du/Dt Filters: Hardware ManualSandeep Kr AryaОценок пока нет
- LAB REPORTx PDFДокумент1 страницаLAB REPORTx PDFSandeep Kr AryaОценок пока нет
- Power & Motor Control CenterДокумент2 страницыPower & Motor Control CenterSandeep Kr AryaОценок пока нет
- Btech-III Year Electronics Engineering 170715Документ22 страницыBtech-III Year Electronics Engineering 170715Sandeep Kr AryaОценок пока нет
- State Bank of IndiaДокумент1 страницаState Bank of IndiaSandeep Kr AryaОценок пока нет
- 540CID01 DS enДокумент10 страниц540CID01 DS enSandeep Kr AryaОценок пока нет
- Registration FormxДокумент1 страницаRegistration FormxSandeep Kr AryaОценок пока нет
- Assignment-1 Electronics Engineering (Nec-101)Документ2 страницыAssignment-1 Electronics Engineering (Nec-101)Sandeep Kr AryaОценок пока нет
- On Basics of OFDM SystemДокумент21 страницаOn Basics of OFDM SystemSandeep Kr AryaОценок пока нет
- ABB Motor Excitation Flyer LowresДокумент2 страницыABB Motor Excitation Flyer LowresGavinsiau100% (1)
- All Motor Ics ListДокумент8 страницAll Motor Ics Listankush sharmaОценок пока нет
- Unit-III Radio Production and Transmission Process: Lesson 4 Recording, Broadcasting and TroubleshootingДокумент14 страницUnit-III Radio Production and Transmission Process: Lesson 4 Recording, Broadcasting and TroubleshootingpariОценок пока нет
- MT QP 10 EssДокумент1 страницаMT QP 10 EssanurekharОценок пока нет
- Service Manual: HCD-D90AV/GR10AV/ RX100AVДокумент88 страницService Manual: HCD-D90AV/GR10AV/ RX100AVConcret SlavaОценок пока нет
- Multiple Choice Practice Questions/Answer For Online/Omr AITT-2020 2 Year Electronics Mech. Trade TheoryДокумент66 страницMultiple Choice Practice Questions/Answer For Online/Omr AITT-2020 2 Year Electronics Mech. Trade TheoryAbcОценок пока нет
- Manual de Partes Bard WAДокумент14 страницManual de Partes Bard WAFausto CompeanОценок пока нет
- Stinger GuideДокумент13 страницStinger GuidejrfjОценок пока нет
- Finished Drawing: Messrs. Imabari Shipbuilding Co.,Ltd. S No 891Документ264 страницыFinished Drawing: Messrs. Imabari Shipbuilding Co.,Ltd. S No 891Jayesh SolaskarОценок пока нет
- 74HC4002 74HCT4002: 1. General DescriptionДокумент17 страниц74HC4002 74HCT4002: 1. General DescriptionJim LiebОценок пока нет
- MCBДокумент6 страницMCBjaveeed0401Оценок пока нет
- Milestone 5Документ8 страницMilestone 5Koh Jiun HaoОценок пока нет
- Overview of PicoBlazeДокумент3 страницыOverview of PicoBlazemussadaqhussain8210Оценок пока нет
- AMPSEAL Automotive Plug Assemblies 776268-, 776273-, 770680-, and 776164Документ2 страницыAMPSEAL Automotive Plug Assemblies 776268-, 776273-, 770680-, and 776164Андрей9Оценок пока нет
- FPGA Implementation of A Trained Neural Network: Seema Singh, Shreyashree Sanjeevi, Suma V, Akhil TalashiДокумент10 страницFPGA Implementation of A Trained Neural Network: Seema Singh, Shreyashree Sanjeevi, Suma V, Akhil TalashiHaiNguyenОценок пока нет
- Test - Practice On Wiring: Protection From ShockДокумент4 страницыTest - Practice On Wiring: Protection From ShockShobu YarlagadaОценок пока нет
- Frigidaire LTF2940ES1 Tech SheetДокумент6 страницFrigidaire LTF2940ES1 Tech SheetSamurai Appliance Repair Man100% (2)
- ETP48200-C5D1 V500R001 User Manual 01Документ83 страницыETP48200-C5D1 V500R001 User Manual 01Emre KayaОценок пока нет
- Huawei Cost OsnДокумент122 страницыHuawei Cost OsnSam AwiОценок пока нет
- Syllabus EET 4190C - Digital Signal Processing - CRN 16952 - Fall 2012Документ4 страницыSyllabus EET 4190C - Digital Signal Processing - CRN 16952 - Fall 2012kokobilizarizoneОценок пока нет
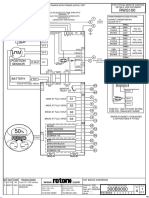
- 300B0000 IQT Basic StandardДокумент2 страницы300B0000 IQT Basic StandardSri67% (3)
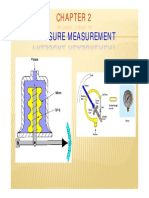
- Chapter 2Документ35 страницChapter 2RhusharvinОценок пока нет
- Pressure MeasurementДокумент41 страницаPressure MeasurementBlowndudeОценок пока нет
- TN-101 SER System ArchitecturesДокумент6 страницTN-101 SER System ArchitecturesTARAKESHWARIRОценок пока нет
- Mst-1 Paper - BSC - Cs - II YearДокумент2 страницыMst-1 Paper - BSC - Cs - II YearPrabhat PandeyОценок пока нет