Вам также может понравиться
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Markus Heitkoetter - The Complete Guide To Day Trading™ PDFДокумент275 страницMarkus Heitkoetter - The Complete Guide To Day Trading™ PDFKelve Aragao100% (3)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Wood Working - Plan - Arcade Cabinet PlansДокумент4 страницыWood Working - Plan - Arcade Cabinet Plansgubem100% (1)
- Gervasoni - PratoДокумент98 страницGervasoni - PratoMiguel García FernándezОценок пока нет
- Bicmos TechnologyДокумент37 страницBicmos TechnologyPriya SinghОценок пока нет
- EC6013-Advanced Microprocessors and MicrocontrollersДокумент8 страницEC6013-Advanced Microprocessors and MicrocontrollerswelcometonceОценок пока нет
- Binary Decimal HexДокумент7 страницBinary Decimal Hex666667Оценок пока нет
- Making Premium Alky LateДокумент25 страницMaking Premium Alky LateChristianGuerreroОценок пока нет
- 13 Organization Challenges of AgileДокумент9 страниц13 Organization Challenges of AgileroxrОценок пока нет
- Operating ModesДокумент8 страницOperating ModesNava KrishnanОценок пока нет
- Matlab TutorialДокумент7 страницMatlab TutorialAbirami RajagopalОценок пока нет
- 10th Tamil One Word Upto September 2017 With KeyДокумент82 страницы10th Tamil One Word Upto September 2017 With KeyNava KrishnanОценок пока нет
- Microwave Power MeterДокумент1 страницаMicrowave Power MeterNava KrishnanОценок пока нет
- 8251 UsartДокумент24 страницы8251 UsartNava KrishnanОценок пока нет
- EC6302 - de - SyllabusДокумент2 страницыEC6302 - de - SyllabusNava KrishnanОценок пока нет
- Department of Electronics and CommunicationmДокумент3 страницыDepartment of Electronics and CommunicationmNava KrishnanОценок пока нет
- 8087 Data Processor 1220335755291895 9Документ14 страниц8087 Data Processor 1220335755291895 9Nava KrishnanОценок пока нет
- 4 Analog PDFДокумент34 страницы4 Analog PDFAditya VyasОценок пока нет
- Low-Power Pulse-Triggered Flip-Flop Design Based On A Signal Feed-Through SchemeДокумент5 страницLow-Power Pulse-Triggered Flip-Flop Design Based On A Signal Feed-Through SchemeNava KrishnanОценок пока нет
- BEE Op Amp ConfigurationsДокумент31 страницаBEE Op Amp ConfigurationsalysonmicheaalaОценок пока нет
- VGA/LCD Core v2.0 Specifications: Author: Richard HerveilleДокумент46 страницVGA/LCD Core v2.0 Specifications: Author: Richard HerveilleNava KrishnanОценок пока нет
- Modeling, Control, and Implementation of DC-DC Converters For Variable Frequency OperationДокумент15 страницModeling, Control, and Implementation of DC-DC Converters For Variable Frequency OperationcrecОценок пока нет
- Testing 13Документ21 страницаTesting 13KushalSwamyОценок пока нет
- C-DAC - Interview QuestionsДокумент27 страницC-DAC - Interview QuestionsNava KrishnanОценок пока нет
- Module10currenttesting 110627091954 Phpapp01Документ28 страницModule10currenttesting 110627091954 Phpapp01Nava KrishnanОценок пока нет
- Quartus TutorialДокумент18 страницQuartus TutorialNava KrishnanОценок пока нет
- Chapter 2Документ86 страницChapter 2api-3834272Оценок пока нет
- Memory InterfacingДокумент55 страницMemory Interfacinganand787Оценок пока нет
- Domino LogicДокумент26 страницDomino LogicKulwant Nagi100% (2)
- MP&MC 2 MarksДокумент57 страницMP&MC 2 MarksNava KrishnanОценок пока нет
- Low-Power and Area-Efficient Carry Select Adder PDFДокумент5 страницLow-Power and Area-Efficient Carry Select Adder PDFVeeresh SalmaniОценок пока нет
- 8251 UsartДокумент24 страницы8251 UsartNava KrishnanОценок пока нет
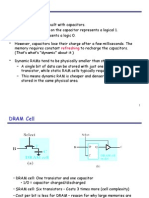
- 14-RAM&ROM - Dynamic Memory Is Built With Capacitors. A Stored Charge On The Capacitor Represents A Logical 1. No Charge Represents A Logic 0.Документ8 страниц14-RAM&ROM - Dynamic Memory Is Built With Capacitors. A Stored Charge On The Capacitor Represents A Logical 1. No Charge Represents A Logic 0.Nava KrishnanОценок пока нет
- KL PartitioningДокумент6 страницKL PartitioningDayanandhan KothandamОценок пока нет
- VGA/LCD Core v2.0 Specifications: Author: Richard HerveilleДокумент46 страницVGA/LCD Core v2.0 Specifications: Author: Richard HerveilleNava KrishnanОценок пока нет
- 271 7Документ0 страниц271 7Usman Sabir100% (1)
- Optimizing Floating Point Units in Hybrid FPGAsДокумент9 страницOptimizing Floating Point Units in Hybrid FPGAsNava KrishnanОценок пока нет
- Marcas de Router (Mac)Документ934 страницыMarcas de Router (Mac)Hebert Castañeda FloresОценок пока нет
- Mahjong - Google SearchДокумент1 страницаMahjong - Google SearchSteve LaceyОценок пока нет
- Using Mapping Tools in MATLABДокумент22 страницыUsing Mapping Tools in MATLABوجدي بلخيريةОценок пока нет
- Column Detail PDFДокумент1 страницаColumn Detail PDFShubham KushwahaОценок пока нет
- Pneu Portable ChairДокумент3 страницыPneu Portable ChairblessyОценок пока нет
- Daftar Part UnitДокумент91 страницаDaftar Part UnitSilvia GosalОценок пока нет
- Tugas 11 Bahasa InggrisДокумент2 страницыTugas 11 Bahasa InggrisGesa Ananda Putra BTNFCОценок пока нет
- VISI ProgressДокумент4 страницыVISI Progressชัยรัตน์ ตันตืไพบูลย์วุฒิОценок пока нет
- SP17316 Smartphones RF Front-End Module Sample System Plus ConsultingДокумент23 страницыSP17316 Smartphones RF Front-End Module Sample System Plus ConsultingVasikaran PrabaharanОценок пока нет
- 7qpg1a Ece Ec8701 Amwe Qb2Документ2 страницы7qpg1a Ece Ec8701 Amwe Qb2Gokul V100% (1)
- AGCДокумент7 страницAGCZarChiAyeОценок пока нет
- Spacial S3X - NSYS3X3215Документ2 страницыSpacial S3X - NSYS3X3215T0 R3dОценок пока нет
- Machines and Equipment For The Production of Autoclaved Aerated ConcreteДокумент9 страницMachines and Equipment For The Production of Autoclaved Aerated ConcretebalajicaptainОценок пока нет
- L-3ff - lIEEE Date: 02/05/2023: Toomw 200MW 20 Mvar 9 Mvar Bus 2Документ26 страницL-3ff - lIEEE Date: 02/05/2023: Toomw 200MW 20 Mvar 9 Mvar Bus 2mahiyanintesirprethuprethuОценок пока нет
- Group1: Refrigeration and Air Conditioning Course ProjectДокумент67 страницGroup1: Refrigeration and Air Conditioning Course Projectdamola2realОценок пока нет
- Afico Liner CatalogueДокумент4 страницыAfico Liner CatalogueChris SolonОценок пока нет
- Active Directory Interview QuestionsДокумент3 страницыActive Directory Interview QuestionsSameer PatelОценок пока нет
- Some Observations and Experience With Pile Integrity Testing at Various Projects For EssarДокумент5 страницSome Observations and Experience With Pile Integrity Testing at Various Projects For EssarKausik DewanОценок пока нет
- University of Hyderabad Post Graduate Diploma in Business Management (PGDBM) I Term Assignment (2016) Dbm-416: Quantitative and Research MethodsДокумент4 страницыUniversity of Hyderabad Post Graduate Diploma in Business Management (PGDBM) I Term Assignment (2016) Dbm-416: Quantitative and Research Methodsrao_nari8305Оценок пока нет
- 09slide 4Документ29 страниц09slide 4Muhanad Al-khalisyОценок пока нет
- Precision Estimates For AASHTO TestДокумент139 страницPrecision Estimates For AASHTO TestFred Jumbas Jr.Оценок пока нет
- Navi Loan Account StatementДокумент1 страницаNavi Loan Account StatementBorah SashankaОценок пока нет
- Exposure Calculator Noise Level (L DB) Exposure Duration (Hours)Документ2 страницыExposure Calculator Noise Level (L DB) Exposure Duration (Hours)Gustavo AlcântaraОценок пока нет
- Andhra Pradesh Public Service CommissionДокумент3 страницыAndhra Pradesh Public Service Commissionb.veenasriОценок пока нет