Вам также может понравиться
- Diseño y Modelamiento de Un Robot Cartesiano para El PosicionamieДокумент124 страницыDiseño y Modelamiento de Un Robot Cartesiano para El PosicionamieMIJAELОценок пока нет
- 14 y 15 Analisis Del Controlador PID y Repaso LGR BODEДокумент85 страниц14 y 15 Analisis Del Controlador PID y Repaso LGR BODEMIJAELОценок пока нет
- Contador multi-instancia PLC S7-1200Документ30 страницContador multi-instancia PLC S7-1200Jorge VargasОценок пока нет
- LAGACETA27ABTFДокумент56 страницLAGACETA27ABTFLaGacetadeCanariasОценок пока нет
- Problemas de paralelismo y optimización de tiempos de ejecución CAPÍTULO 7Документ6 страницProblemas de paralelismo y optimización de tiempos de ejecución CAPÍTULO 7Snaider Silvera100% (1)
- Transmisión Analógica 4-20mA vs Voltaje: Ventajas Distancia RuidoДокумент3 страницыTransmisión Analógica 4-20mA vs Voltaje: Ventajas Distancia RuidoArte VidriosОценок пока нет
- Cinematica Del Robot Laboratorio 2Документ4 страницыCinematica Del Robot Laboratorio 2Walter CastellanosОценок пока нет
- Convertidores analógicos y digitales: tipos, características y usosДокумент4 страницыConvertidores analógicos y digitales: tipos, características y usosAlber Lim GboОценок пока нет
- Unit 2 - Clasificacion Por Estructura PLCДокумент26 страницUnit 2 - Clasificacion Por Estructura PLCJaret GarciaОценок пока нет
- Diseño de Convertidores DC-DC Tipo Buck Típicos y Controlado para Un Mejor Entendimiento en Cuanto A Su Funcionamiento.Документ12 страницDiseño de Convertidores DC-DC Tipo Buck Típicos y Controlado para Un Mejor Entendimiento en Cuanto A Su Funcionamiento.hhryc7100% (3)
- Oscilador de RelajacionДокумент17 страницOscilador de RelajacionVíctor Flores AndinoОценок пока нет
- Función Transferencia y Respuesta-Impulso (FT-RIДокумент20 страницFunción Transferencia y Respuesta-Impulso (FT-RIDarwinОценок пока нет
- Comunicación inalámbrica RF entre ArduinosДокумент16 страницComunicación inalámbrica RF entre Arduinosankasi rey hhОценок пока нет
- Sistema de Control DigitalДокумент10 страницSistema de Control DigitalYEFERSONОценок пока нет
- Circuito de Disparo para Un Rectificador Trifásico Controlado Empleando SCR'sДокумент4 страницыCircuito de Disparo para Un Rectificador Trifásico Controlado Empleando SCR'sJ.A. Calvillo100% (1)
- Teclado Matricial 4x4 Con El PIC16F877AДокумент4 страницыTeclado Matricial 4x4 Con El PIC16F877AELPICHUEОценок пока нет
- FibonacciДокумент4 страницыFibonacciPaola Giraldo MontoyaОценок пока нет
- DAC0800Документ4 страницыDAC0800Victor Cardenas Cuevas50% (2)
- Examen Sistemas de Control DigitalДокумент6 страницExamen Sistemas de Control DigitalPatrick Gilbert De la Cruz FloresОценок пока нет
- Control Difuso PD para Un Balancin Con Motor BrushlessДокумент18 страницControl Difuso PD para Un Balancin Con Motor BrushlessFernando Her RОценок пока нет
- Practica 003Документ35 страницPractica 003Fernando GómezОценок пока нет
- Control de Posición de Balancín Con Motor y HéliceДокумент9 страницControl de Posición de Balancín Con Motor y HéliceGabriel AyalaОценок пока нет
- Reporte de Seguidor de LineaДокумент10 страницReporte de Seguidor de LineaRaymond KenneyОценок пока нет
- Motor DC Con PICДокумент21 страницаMotor DC Con PICbrandon0% (1)
- Informe Práctica Nro. 4: Diseñar Aplicaciones Con La Interfaz Intercircuito. (I2C)Документ22 страницыInforme Práctica Nro. 4: Diseñar Aplicaciones Con La Interfaz Intercircuito. (I2C)Victorino VillamizarОценок пока нет
- Ejercicio. Filtro Pasa-Banda, Rechazo de BandaДокумент3 страницыEjercicio. Filtro Pasa-Banda, Rechazo de Bandaalu0100815382Оценок пока нет
- Sistemas de control automático en procesos industrialesДокумент20 страницSistemas de control automático en procesos industrialesErick VelasquezОценок пока нет
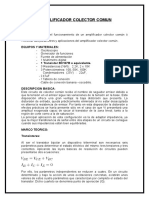
- Amplificador Colector ComunДокумент13 страницAmplificador Colector ComunJorge Leonardo CamachoОценок пока нет
- XI Olimpiada Nacional de Robótica ECIBOT-2014Документ8 страницXI Olimpiada Nacional de Robótica ECIBOT-2014Fabian BallenОценок пока нет
- Guia de LAb #4 de Sistema de Control II ControlabilidadДокумент18 страницGuia de LAb #4 de Sistema de Control II ControlabilidadSALAZAR CAMPOS JOSSEF JORDANОценок пока нет
- Control de Potencia Con El SCRДокумент15 страницControl de Potencia Con El SCRPipe CastilloОценок пока нет
- 4 CAPITULO 2 Modelamiento DinamicoДокумент32 страницы4 CAPITULO 2 Modelamiento DinamicoJuanManuelHurtadoValdiviaОценок пока нет
- Problemas Control Moderno Resuelto (Discreto)Документ11 страницProblemas Control Moderno Resuelto (Discreto)Karol SaenzОценок пока нет
- Laboratorio 2 PLCДокумент8 страницLaboratorio 2 PLCJose Antonio Bellido Vargas100% (1)
- Control de Un Motor DC Mediante Realimentación de EstadosДокумент2 страницыControl de Un Motor DC Mediante Realimentación de EstadosAndres AndradeОценок пока нет
- Microcontrolador 8051 interrupcionesДокумент23 страницыMicrocontrolador 8051 interrupcionesElvaroОценок пока нет
- El Lugar Geométrico de RaicesДокумент14 страницEl Lugar Geométrico de RaicesLuis LОценок пока нет
- Programar PIC18F4550 para mostrar oración en LCD 16x2Документ10 страницProgramar PIC18F4550 para mostrar oración en LCD 16x2Edward MedinaОценок пока нет
- Control de Llenado de Un Tanque IndustrialДокумент9 страницControl de Llenado de Un Tanque IndustrialAlexis Núñez GonzálezОценок пока нет
- Informe9 ValdviezoD LombeidaD LabRI GR31Документ8 страницInforme9 ValdviezoD LombeidaD LabRI GR31Diego ValdiviezoОценок пока нет
- Laboratorio Esp 8266Документ23 страницыLaboratorio Esp 8266JuniorОценок пока нет
- Manual de WinCC Flexible 2008Документ33 страницыManual de WinCC Flexible 2008nathan_allgrenОценок пока нет
- Comunicacion Matlab-ArduinoДокумент4 страницыComunicacion Matlab-ArduinoRichard ArturoОценок пока нет
- Ejercicios de SimulinkДокумент13 страницEjercicios de SimulinkEduardo Briones ZambranoОценок пока нет
- Sistema de Automatizacion S7 200Документ478 страницSistema de Automatizacion S7 200Jhonny Zambrano SaavedraОценок пока нет
- Calculo Avanzado Programa UTN FRBAДокумент7 страницCalculo Avanzado Programa UTN FRBALeo@spОценок пока нет
- Sistemas Digitales II EspolДокумент4 страницыSistemas Digitales II EspolByron MotocheОценок пока нет
- Informe DC-DC ReductorДокумент9 страницInforme DC-DC ReductorWilliam Tamayo100% (1)
- Lab 03 Conversion de Sistemas Continuos A DiscretosДокумент8 страницLab 03 Conversion de Sistemas Continuos A DiscretosJavier EsquivelОценок пока нет
- Informe Practica Nro. 02: Manejo de Interrupciones Externas Del Microcontrolador PIC 18F4550Документ20 страницInforme Practica Nro. 02: Manejo de Interrupciones Externas Del Microcontrolador PIC 18F4550Victorino VillamizarОценок пока нет
- TroceadorДокумент198 страницTroceadorJacqueline LunaОценок пока нет
- Máquinas de estado finito (FSM) y su modelado con VHDLДокумент77 страницMáquinas de estado finito (FSM) y su modelado con VHDLDiegoGuzmanОценок пока нет
- Ajustes de Zero y Span en Transmisores Analógicos Siempre Nos Toparemos Con AlgunoДокумент3 страницыAjustes de Zero y Span en Transmisores Analógicos Siempre Nos Toparemos Con AlgunoHJОценок пока нет
- Practica UJTДокумент8 страницPractica UJTxXLiAXx0% (1)
- Practica 3Документ5 страницPractica 3ross11Оценок пока нет
- Funciones de Transferencia (MATLAB)Документ27 страницFunciones de Transferencia (MATLAB)GABI DANIELA LOPEZ PEREZОценок пока нет
- Estimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareОт EverandEstimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareОценок пока нет
- IV congreso internacional de ingenierías: La ingeniería como base del desarrolloОт EverandIV congreso internacional de ingenierías: La ingeniería como base del desarrolloОценок пока нет
- Expo CanopenДокумент6 страницExpo Canopenjhon EXTREMAОценок пока нет
- Los Fundamentos de CANopen PDFДокумент12 страницLos Fundamentos de CANopen PDFMitecCenememОценок пока нет
- Reporte-Pasion en AccionДокумент26 страницReporte-Pasion en AccionSheila GracidaОценок пока нет
- Tarea 5 y 6, de PasantiaДокумент8 страницTarea 5 y 6, de PasantiaMichael MartinezОценок пока нет
- GacetaNo 26212 20090129 PDFДокумент88 страницGacetaNo 26212 20090129 PDFIrma Galego PazОценок пока нет
- Examen FINAL - BIII - WECDIS (21-22) - SRДокумент6 страницExamen FINAL - BIII - WECDIS (21-22) - SRpromocion426.156Оценок пока нет
- Tarea - 3 - Grupo 112001 - 121Документ17 страницTarea - 3 - Grupo 112001 - 121Sara Ximena Cordero CepedaОценок пока нет
- Manual Tecnico de CitricosДокумент22 страницыManual Tecnico de CitricosMelissa HesterОценок пока нет
- 03 UmlДокумент12 страниц03 UmlJuan Jesus Yampasi EspejoОценок пока нет
- Cumplimiento de obligaciones civiles: elementos, modalidades y personas autorizadasДокумент27 страницCumplimiento de obligaciones civiles: elementos, modalidades y personas autorizadasCARLOS ADRIAN SANDOVAL PATZANОценок пока нет
- Problemas Y Desafios - S3Документ2 страницыProblemas Y Desafios - S3Juan OrbegosoОценок пока нет
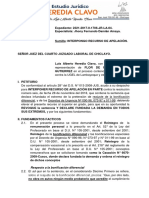
- Recurso de apelación por reintegro de bonificaciones y reajustesДокумент5 страницRecurso de apelación por reintegro de bonificaciones y reajustesRonaldGarcíaSalcedoОценок пока нет
- Principales Instrumentos de Politica AgrariaДокумент23 страницыPrincipales Instrumentos de Politica AgrariaricardoОценок пока нет
- BasuresДокумент52 страницыBasuresAna Viviana OrtegaОценок пока нет
- Tesina Dimensionamiento de Un Panel SolarДокумент17 страницTesina Dimensionamiento de Un Panel SolarEduardo Vargas ArancibiaОценок пока нет
- TEMPO Fireworks Propuesta 30 Abr, 2022 QRДокумент5 страницTEMPO Fireworks Propuesta 30 Abr, 2022 QRMiguel TorresОценок пока нет
- Prevenciáon de Riesgos en Las Tareas de Limpieza v1Документ20 страницPrevenciáon de Riesgos en Las Tareas de Limpieza v1Sahid Moises Villarroel BariquiОценок пока нет
- Resolucion Ministerial #849-2018 De/sgДокумент1 страницаResolucion Ministerial #849-2018 De/sgKrsnadasa1986Оценок пока нет
- Catalogo de OPCIONES Evidencias y Testimonios Drywall Hogar 2023Документ60 страницCatalogo de OPCIONES Evidencias y Testimonios Drywall Hogar 2023Brayan ChavezОценок пока нет
- Minutas Derecho de Peticion y Accion de Tutela 5Документ5 страницMinutas Derecho de Peticion y Accion de Tutela 5luisОценок пока нет
- Actividad de agua en alimentos: Control de calidad, seguridad y vida útilДокумент2 страницыActividad de agua en alimentos: Control de calidad, seguridad y vida útilJosé Luis Espinosa EnríquezОценок пока нет
- Taller #3 (Árbol de Problemas)Документ5 страницTaller #3 (Árbol de Problemas)Leopoldo ChenОценок пока нет
- Respuetas Preguntas Dinamizadoras Unidad 2Документ2 страницыRespuetas Preguntas Dinamizadoras Unidad 2julian hernandez sotoОценок пока нет
- Dispositivos Analógicos DigitalesДокумент3 страницыDispositivos Analógicos DigitalesMauricio A. SalazarОценок пока нет
- Qué Es Un PeriódicoДокумент2 страницыQué Es Un PeriódicoCarolina Reyes AlemanОценок пока нет
- Contrato transacción arrendamientoДокумент2 страницыContrato transacción arrendamientoLuis FiligranaОценок пока нет
- Solicitud de Entrega de Prestaciones A Un Trabajador Presentado Ante La JuntaДокумент2 страницыSolicitud de Entrega de Prestaciones A Un Trabajador Presentado Ante La Juntaclarisk074Оценок пока нет
- Evaluación capacidad trabajo en equipo jefes empresaДокумент13 страницEvaluación capacidad trabajo en equipo jefes empresaDania Melissa Ramirez LoangoОценок пока нет
- Equipos de SoldaduraДокумент10 страницEquipos de SoldaduraMiguel Poccomucha EspinozaОценок пока нет
- Catalogo Miramar 055-2022Документ7 страницCatalogo Miramar 055-2022MXIMO qОценок пока нет