Вам также может понравиться
- Two Reaction Theory of Synchronous MachinesДокумент15 страницTwo Reaction Theory of Synchronous MachinesxernoxianОценок пока нет
- Synchronous Machines3Документ103 страницыSynchronous Machines3Daniela CastroОценок пока нет
- Synchronous MachinesДокумент23 страницыSynchronous MachinesAntonio PejanovićОценок пока нет
- Synchronous Machine ModelДокумент22 страницыSynchronous Machine ModelMultazam ZemОценок пока нет
- Electrical Machines: Induction Motors & Synchronous MachinesДокумент42 страницыElectrical Machines: Induction Motors & Synchronous MachinesYoshua DylanОценок пока нет
- Estimated Reactive Capability CurveДокумент1 страницаEstimated Reactive Capability CurveLeonel AlolorОценок пока нет
- Solid State Control of Synchronous Motor & PMSMДокумент42 страницыSolid State Control of Synchronous Motor & PMSMNitish50% (2)
- IEEE Transactions On Magnetics Volume 22 Issue 5 1986 (Doi 10.1109 - Tmag.1986.1064466) Sebastian, T. Slemon, G. Rahman, M. - Modelling of Permanent Magnet Synchronous MotorsДокумент3 страницыIEEE Transactions On Magnetics Volume 22 Issue 5 1986 (Doi 10.1109 - Tmag.1986.1064466) Sebastian, T. Slemon, G. Rahman, M. - Modelling of Permanent Magnet Synchronous MotorsmauricetappaОценок пока нет
- Speed Control of Vsi Based Induction Motor Using AnnДокумент38 страницSpeed Control of Vsi Based Induction Motor Using AnnPAVAN CHAVALIОценок пока нет
- Synchronous Generator Operating ChartДокумент4 страницыSynchronous Generator Operating Chartp41005679Оценок пока нет
- Scalar Control of Ac DrivesДокумент38 страницScalar Control of Ac Drivessureshy-ee213Оценок пока нет
- Synchronous MachinesclassДокумент76 страницSynchronous Machinesclassbhuvana71Оценок пока нет
- Artificial Loading of Induction MotorsДокумент6 страницArtificial Loading of Induction Motorsamkeew100% (1)
- Synchronous MachineДокумент51 страницаSynchronous MachineahmmsayemОценок пока нет
- Synchronous GeneratorsДокумент24 страницыSynchronous GeneratorsSyed Muhammad Munavvar Hussain67% (3)
- Synchronous Machine: Construction &types TypeДокумент9 страницSynchronous Machine: Construction &types TypeProma GurОценок пока нет
- LQR Tuning of Power System Stabilizer For Damping OscillationsДокумент18 страницLQR Tuning of Power System Stabilizer For Damping Oscillations●●●●●●●1100% (1)
- Wound-Field Synchronous Machine DrivesДокумент62 страницыWound-Field Synchronous Machine DrivesKorlpate BhaskarОценок пока нет
- Lab MachineДокумент9 страницLab MachineAnonymous ryvoPIDОценок пока нет
- SPEED Electric Machines BrochureДокумент8 страницSPEED Electric Machines Brochure张之政Оценок пока нет
- 261Документ11 страниц261nitinseebОценок пока нет
- Generator Controls Voltage StabilityДокумент13 страницGenerator Controls Voltage StabilityhhipowerОценок пока нет
- Electro-Thermal Analysis of An Induction MotorДокумент5 страницElectro-Thermal Analysis of An Induction MotorS Bharadwaj Reddy100% (1)
- PM Synchronous Motor Simulation and Closed-Loop ControlДокумент12 страницPM Synchronous Motor Simulation and Closed-Loop ControlsdahbxcОценок пока нет
- Synchronous GeneratorДокумент9 страницSynchronous GeneratorPathum SudasingheОценок пока нет
- Class D Audio Amplifier Circuit DiagramДокумент1 страницаClass D Audio Amplifier Circuit Diagramnegrelli-rn100% (1)
- Experimental Determination of Synchronous Generator ParametersДокумент116 страницExperimental Determination of Synchronous Generator Parameterscarlos vidal100% (1)
- Solid State Drives Short BookДокумент48 страницSolid State Drives Short BookGomathi Raja MОценок пока нет
- Variable Reluctance Motor BasicsДокумент6 страницVariable Reluctance Motor BasicsRevant SharmaОценок пока нет
- THYRISTORSДокумент19 страницTHYRISTORSajo zinzoОценок пока нет
- A New Method For Online Thyristor Conduction Monitoring Based On Thyristor Current Waveform Recording in Static Excitation SystemДокумент6 страницA New Method For Online Thyristor Conduction Monitoring Based On Thyristor Current Waveform Recording in Static Excitation SystemR0B0T2013Оценок пока нет
- An Introduction To Completing A NERC PRC-019 StudyДокумент11 страницAn Introduction To Completing A NERC PRC-019 StudySMS AbdullahОценок пока нет
- Unit Iii Induction Motor Drives: Dept. of EEEДокумент17 страницUnit Iii Induction Motor Drives: Dept. of EEEmanoj kumarОценок пока нет
- Induction Motor Design Using FEMMДокумент13 страницInduction Motor Design Using FEMMJunaid AhmadОценок пока нет
- Analysis of Electrical MachineryДокумент66 страницAnalysis of Electrical Machineryzabig100% (1)
- Avr CubicleДокумент28 страницAvr CubicleJITPLОценок пока нет
- Dynamic Modeling of PMSMДокумент10 страницDynamic Modeling of PMSMHisham Magdi El DeebОценок пока нет
- البحثДокумент88 страницالبحثWoldemariam WorkuОценок пока нет
- #1 Generator Protection AДокумент12 страниц#1 Generator Protection ARodrigo Mendoza PerezОценок пока нет
- Lec9 - Basics of Electric Drives - IMДокумент10 страницLec9 - Basics of Electric Drives - IMTeofilo DedietroОценок пока нет
- AGC-4 Data Sheet 4921240432 ESДокумент2 страницыAGC-4 Data Sheet 4921240432 ESKarel GómezОценок пока нет
- Generator-Transformer Capability Chart AnalysisДокумент4 страницыGenerator-Transformer Capability Chart AnalysisFreddy TamayoОценок пока нет
- Speed Control of Induction Motors - 2 PDFДокумент22 страницыSpeed Control of Induction Motors - 2 PDFZariz ZakianОценок пока нет
- Dcmotors and Their RepresentationДокумент61 страницаDcmotors and Their RepresentationSoeprapto AtmariОценок пока нет
- 2012 Practical Strategies For Improved Cooling of Electrical Motors and Generators Dave Staton INDUCTICA TECHNICAL CONFERENCE PDFДокумент8 страниц2012 Practical Strategies For Improved Cooling of Electrical Motors and Generators Dave Staton INDUCTICA TECHNICAL CONFERENCE PDFuuur35Оценок пока нет
- Electrical Machines EE-260: Instructor: DR Mehmood AlamДокумент31 страницаElectrical Machines EE-260: Instructor: DR Mehmood AlamSaif Ur RehmanОценок пока нет
- TurbineДокумент34 страницыTurbineGheghel Gutierrez HuamanОценок пока нет
- Course "EEM 42 Three-Phase Asynchronous Machines: Dahlander Motors"Документ38 страницCourse "EEM 42 Three-Phase Asynchronous Machines: Dahlander Motors"Daus VillaОценок пока нет
- Dynamics and Control of Ac DrivesДокумент4 страницыDynamics and Control of Ac DrivesRitesh Kumar MohantyОценок пока нет
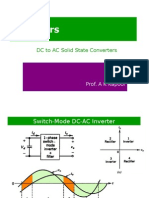
- InvertersДокумент35 страницInvertersyashtОценок пока нет
- Chp6 DC Motor Drives (Uncontrolled and Controlled Rectifier) - FinalДокумент49 страницChp6 DC Motor Drives (Uncontrolled and Controlled Rectifier) - Finalblaze emberОценок пока нет
- Synchronous MotorДокумент4 страницыSynchronous MotorLiviu DeaconuОценок пока нет
- Vacon NXL Multicontrol Application Manual DPD01447A UKДокумент63 страницыVacon NXL Multicontrol Application Manual DPD01447A UKAbijithОценок пока нет
- Static Excitation System Stage-I. 2docДокумент28 страницStatic Excitation System Stage-I. 2docraghavendran raghu100% (1)
- Calculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsДокумент8 страницCalculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsWalter SantiОценок пока нет
- Synchronous Rectification National Power Designer 112Документ8 страницSynchronous Rectification National Power Designer 112sivasankartikkuОценок пока нет
- Parameter Synchronous MachineДокумент6 страницParameter Synchronous MachineKiranОценок пока нет
- The Elementary Mathematical Model: 2. 1 Swing EquationДокумент40 страницThe Elementary Mathematical Model: 2. 1 Swing EquationMarian ArjonaОценок пока нет
- Direct-Current MachinesДокумент108 страницDirect-Current MachinesHenry KabasaОценок пока нет
- Three-Phase Asynchronous MotorsДокумент46 страницThree-Phase Asynchronous Motorswartsil100% (4)
- Personal Positioning For EngineersДокумент26 страницPersonal Positioning For EngineersYoramОценок пока нет
- Reduce Your Engineering Drawing Errors Preventing The Most Common MistakesДокумент166 страницReduce Your Engineering Drawing Errors Preventing The Most Common Mistakestyc1986100% (1)
- Directional Protection and Directional PDFДокумент32 страницыDirectional Protection and Directional PDFhamada13Оценок пока нет
- ABB Power System Earth ProtectionДокумент86 страницABB Power System Earth Protectiontyc1986100% (2)
- Abb Sace CurveДокумент40 страницAbb Sace CurveAshok ChaniyaraОценок пока нет
- The Motor GuideДокумент135 страницThe Motor Guidegraduadoesime100% (2)
- White PaperДокумент17 страницWhite PaperwartsilОценок пока нет
- Working With The Trip Characteristic Curves of ABB SACE Low Voltage Circuit-Breakers.Документ12 страницWorking With The Trip Characteristic Curves of ABB SACE Low Voltage Circuit-Breakers.tyc1986Оценок пока нет
- Electrical Education For Construction EngineersДокумент5 страницElectrical Education For Construction Engineerstyc1986Оценок пока нет
- Emsd Cop - e 2009Документ338 страницEmsd Cop - e 2009ew_rainОценок пока нет
- Thomson LineДокумент1 страницаThomson Linetyc1986Оценок пока нет
- The Motor GuideДокумент135 страницThe Motor Guidegraduadoesime100% (2)
- Lamps and LightingДокумент5 страницLamps and Lightingtyc1986Оценок пока нет
- L-6 (NKK) (Ie) ( (Ee) Nptel)Документ9 страницL-6 (NKK) (Ie) ( (Ee) Nptel)generalclimaticОценок пока нет
- Art of Negotiation How To Handle Your BossДокумент22 страницыArt of Negotiation How To Handle Your BossOčem SemОценок пока нет
- Escape LightingДокумент2 страницыEscape Lightingtyc1986Оценок пока нет
- Thomson LineДокумент1 страницаThomson Linetyc1986Оценок пока нет
- DrillchartДокумент5 страницDrillchartcc6689Оценок пока нет
- Ashok Leyland In-Plant Training ReportДокумент12 страницAshok Leyland In-Plant Training Reportbalakvit100% (2)
- Sensores RGДокумент47 страницSensores RGMauricioCerdaCastilloОценок пока нет
- Pilot Boat PO - Sea Trial ReportДокумент16 страницPilot Boat PO - Sea Trial ReportKyaw Oo100% (2)
- SM - 3 TransmissionДокумент397 страницSM - 3 TransmissionJanОценок пока нет
- Effects of Shear Box Size and Silt Content on Strength of Silty SandsДокумент7 страницEffects of Shear Box Size and Silt Content on Strength of Silty SandsJavier MtОценок пока нет
- 10 Examples of Projectile MotionДокумент6 страниц10 Examples of Projectile MotionGlaizel MorcillaОценок пока нет
- RSC-1650C, H, HR Service Manual (061208)Документ56 страницRSC-1650C, H, HR Service Manual (061208)JamesОценок пока нет
- CHM 101 Lecture Note-Gas LawsДокумент11 страницCHM 101 Lecture Note-Gas LawsMichael DanielsОценок пока нет
- Lathe Machine Specifications Specification Unit Specification UnitДокумент1 страницаLathe Machine Specifications Specification Unit Specification UnitTHIRUMALAIОценок пока нет
- Warp Bicycle Owners ManualДокумент13 страницWarp Bicycle Owners ManualfishernrfОценок пока нет
- Application of Pump: CentrifugalДокумент8 страницApplication of Pump: CentrifugalLipika GayenОценок пока нет
- Pneumatic Circuit TrainerДокумент5 страницPneumatic Circuit Trainerdipsankar chatterjeeОценок пока нет
- D7H Electrico PDFДокумент2 страницыD7H Electrico PDFAnonymous KOtSfT6qОценок пока нет
- Comparison of Effective Width Method, Pigeaud's Theory and Westergaad's Method With SAP2000 Fem ModelДокумент14 страницComparison of Effective Width Method, Pigeaud's Theory and Westergaad's Method With SAP2000 Fem ModelAkarshGowdaОценок пока нет
- 2009 BMW E60 Vibration at IdleДокумент2 страницы2009 BMW E60 Vibration at IdlewmirkhanОценок пока нет
- PPV PresentationДокумент66 страницPPV PresentationIvan BogdanОценок пока нет
- Compression Member FailureДокумент8 страницCompression Member FailureEarl LomotanОценок пока нет
- Guidelines For Specification of Turbulence at Inflow BoundariesДокумент3 страницыGuidelines For Specification of Turbulence at Inflow BoundariesAmbrish Singh100% (2)
- Commissioning Air PreheaterДокумент14 страницCommissioning Air Preheaterarvidkumar87060Оценок пока нет
- 1018Документ1 страница1018Alonso ReynaОценок пока нет
- Welding Machine Repairing Service in Rajkot Gujarat IndiaДокумент127 страницWelding Machine Repairing Service in Rajkot Gujarat IndiaSpandan MishraОценок пока нет
- 101 Greseli de Lexic Si de SemanticaДокумент24 страницы101 Greseli de Lexic Si de Semanticaradu70Оценок пока нет
- Lifting Bails PDFДокумент1 страницаLifting Bails PDFJoaoОценок пока нет
- Sealer Technology: Corrosion Resistant CoatingsДокумент8 страницSealer Technology: Corrosion Resistant CoatingsSantiago TuestaОценок пока нет
- Virendra Oberoi-Automation in Ring Spinning MachinesДокумент28 страницVirendra Oberoi-Automation in Ring Spinning MachinesDurai RajОценок пока нет
- SECTION Theory&Verification Ver 460Документ137 страницSECTION Theory&Verification Ver 460A_saravanavelОценок пока нет
- Viva QuestionsДокумент16 страницViva Questionsjpsridhar100% (1)
- Node List & SIFДокумент2 страницыNode List & SIFCandraОценок пока нет
- Digital Valve Controler DVC6200Документ48 страницDigital Valve Controler DVC6200kkobaseОценок пока нет
- Secrets of the Millionaire Mind: Mastering the Inner Game of WealthОт EverandSecrets of the Millionaire Mind: Mastering the Inner Game of WealthРейтинг: 4.5 из 5 звезд4.5/5 (197)
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОт EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОценок пока нет
- Introduction to Power System ProtectionОт EverandIntroduction to Power System ProtectionРейтинг: 5 из 5 звезд5/5 (1)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentОт EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentРейтинг: 4.5 из 5 звезд4.5/5 (21)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureОт EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureРейтинг: 3.5 из 5 звезд3.5/5 (48)
- Build Your Own Electric Vehicle, Third EditionОт EverandBuild Your Own Electric Vehicle, Third EditionРейтинг: 4.5 из 5 звезд4.5/5 (3)
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyОт EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyОценок пока нет
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsОт EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsОценок пока нет
- The Game: Penetrating the Secret Society of Pickup ArtistsОт EverandThe Game: Penetrating the Secret Society of Pickup ArtistsРейтинг: 4 из 5 звезд4/5 (131)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesОт EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesРейтинг: 4.5 из 5 звезд4.5/5 (21)
- Asset Integrity Management for Offshore and Onshore StructuresОт EverandAsset Integrity Management for Offshore and Onshore StructuresОценок пока нет
- Shorting the Grid: The Hidden Fragility of Our Electric GridОт EverandShorting the Grid: The Hidden Fragility of Our Electric GridРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Operational Amplifier Circuits: Analysis and DesignОт EverandOperational Amplifier Circuits: Analysis and DesignРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Handbook on Battery Energy Storage SystemОт EverandHandbook on Battery Energy Storage SystemРейтинг: 4.5 из 5 звезд4.5/5 (2)
- The Rare Metals War: the dark side of clean energy and digital technologiesОт EverandThe Rare Metals War: the dark side of clean energy and digital technologiesРейтинг: 5 из 5 звезд5/5 (2)
- ISO 50001: A strategic guide to establishing an energy management systemОт EverandISO 50001: A strategic guide to establishing an energy management systemОценок пока нет
- Nuclear Energy in the 21st Century: World Nuclear University PressОт EverandNuclear Energy in the 21st Century: World Nuclear University PressРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Proof of Heaven: A Neurosurgeon's Journey into the AfterlifeОт EverandProof of Heaven: A Neurosurgeon's Journey into the AfterlifeРейтинг: 3.5 из 5 звезд3.5/5 (165)
- Industrial Piping and Equipment Estimating ManualОт EverandIndustrial Piping and Equipment Estimating ManualРейтинг: 5 из 5 звезд5/5 (7)
- Energy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksОт EverandEnergy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksОценок пока нет
- How to Install & Design Solar Panels like a Professional: Save Thousands by Doing It Yourself: Power All Your Projects with the Power of the SunОт EverandHow to Install & Design Solar Panels like a Professional: Save Thousands by Doing It Yourself: Power All Your Projects with the Power of the SunРейтинг: 3 из 5 звезд3/5 (1)
- Natural Gas Processing: Technology and Engineering DesignОт EverandNatural Gas Processing: Technology and Engineering DesignРейтинг: 5 из 5 звезд5/5 (8)