Вам также может понравиться
- Métodos Matriciales para ingenieros con MATLABОт EverandMétodos Matriciales para ingenieros con MATLABРейтинг: 5 из 5 звезд5/5 (1)
- Diagrama de Algoritmo Comp. de AdelantoДокумент9 страницDiagrama de Algoritmo Comp. de AdelantoTobías Clark TorettoОценок пока нет
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónОт EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónРейтинг: 5 из 5 звезд5/5 (1)
- Diag Algorit Compensador Adelanto Ej B-9-5 4a EdДокумент10 страницDiag Algorit Compensador Adelanto Ej B-9-5 4a EdGenaro Ivan Chavez CamachoОценок пока нет
- Problemas resueltos de Hidráulica de CanalesОт EverandProblemas resueltos de Hidráulica de CanalesРейтинг: 4.5 из 5 звезд4.5/5 (7)
- 4 Compensador en AdelantoДокумент11 страниц4 Compensador en AdelantoDiego Onofre Vásquez100% (1)
- Avalos Deber4Документ12 страницAvalos Deber4Thomás ValenciaОценок пока нет
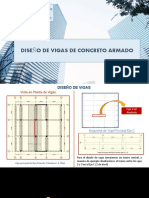
- Diseño de Vigas de Una EdifcacionДокумент19 страницDiseño de Vigas de Una EdifcacionDAFA100% (2)
- Control neuronal y difuso para sistemas fotovoltaicosОт EverandControl neuronal y difuso para sistemas fotovoltaicosОценок пока нет
- Diseño Del Compensador para Un Sistema Masa ResorteДокумент11 страницDiseño Del Compensador para Un Sistema Masa ResorteAbraham Davila AndradeОценок пока нет
- Controldigital-Libro de TextoДокумент21 страницаControldigital-Libro de TextoNate River0% (1)
- Ejercicios de Integrales de Línea, Superficie y VolumenОт EverandEjercicios de Integrales de Línea, Superficie y VolumenРейтинг: 4 из 5 звезд4/5 (2)
- Simulación Mediante Matlab de Un Sistema de Control PDFДокумент25 страницSimulación Mediante Matlab de Un Sistema de Control PDFaracfenixОценок пока нет
- Guía práctica de eficiencia energética en alumbrado exteriorОт EverandGuía práctica de eficiencia energética en alumbrado exteriorОценок пока нет
- Diseño de Sistemas de Control Adelanto, Atraso y Adelanto-AtrasoДокумент15 страницDiseño de Sistemas de Control Adelanto, Atraso y Adelanto-AtrasoJerry ValdezОценок пока нет
- Proyecto TacometroДокумент20 страницProyecto TacometroLuis Alfonso Prada LeonОценок пока нет
- Informe Proyecto BalancinДокумент12 страницInforme Proyecto BalancinJader Alvarino100% (1)
- Ejercicios de Simulink ModeladoДокумент33 страницыEjercicios de Simulink ModeladoAna Karen Gonzalez100% (1)
- Tesis Diseño de Una Helice para HelicopterosДокумент40 страницTesis Diseño de Una Helice para HelicopterosGorge ChechoiОценок пока нет
- A D Espectral PDFДокумент25 страницA D Espectral PDFAlbert Luque RamirezОценок пока нет
- Practica 13 - LCAII PDFДокумент4 страницыPractica 13 - LCAII PDFGold Mendez GonzalezОценок пока нет
- P1E2Документ16 страницP1E2Alex EmilianoОценок пока нет
- Examenes Rae 0708Документ40 страницExamenes Rae 0708Milton Fonseca ZuritaОценок пока нет
- CeduvirtSimulink PDFДокумент33 страницыCeduvirtSimulink PDFArturo RawrОценок пока нет
- Trabajo CONTROL Edgar MaciasДокумент11 страницTrabajo CONTROL Edgar MaciasEdgar MaciasОценок пока нет
- Primer Parcial Tópicos Avanzados de Control 2Документ8 страницPrimer Parcial Tópicos Avanzados de Control 2Oscar AlfonsoОценок пока нет
- Aporte 2Документ8 страницAporte 2Magaly QuimbayoОценок пока нет
- Memoria de CalculoДокумент31 страницаMemoria de CalculojaynerОценок пока нет
- Vigas - ApdlДокумент76 страницVigas - ApdlAndrea AguilarОценок пока нет
- Informe Final 8Документ6 страницInforme Final 8Anonymous iGvZPKrОценок пока нет
- Informe Final Control IiДокумент11 страницInforme Final Control Iibrayan vilela villegasОценок пока нет
- TP2 Simplificación-2024Документ5 страницTP2 Simplificación-2024Magali GutierrezОценок пока нет
- T3 19 MilagrosJCoronadoДокумент11 страницT3 19 MilagrosJCoronadoelvisОценок пока нет
- Sintonizacion de ControladoresДокумент31 страницаSintonizacion de ControladoresGiovanny CifuentesОценок пока нет
- Trabajo Control AnalogoДокумент9 страницTrabajo Control AnalogoGademara100% (1)
- ProyectoCorto1 Hps5130 CONTROL MotorCDДокумент12 страницProyectoCorto1 Hps5130 CONTROL MotorCDJose Guillermo Masis MurilloОценок пока нет
- PROYFINAL 1 Ing Control Upb 2 - 2021 - TEMPERATURAДокумент4 страницыPROYFINAL 1 Ing Control Upb 2 - 2021 - TEMPERATURASantiago Farías CamargoОценок пока нет
- Tarea 2 Control Automatico FullДокумент33 страницыTarea 2 Control Automatico FullSergio Enrique Berrios GonzalezОценок пока нет
- PRACTICA3YSMARTINEZДокумент16 страницPRACTICA3YSMARTINEZYscarlys MartinezОценок пока нет
- Control DigitalДокумент10 страницControl Digitaljajs130% (1)
- Control - Digital - Tarea - 3 Ivan BolañoДокумент8 страницControl - Digital - Tarea - 3 Ivan BolañoIvan BolañoОценок пока нет
- Control PlantaДокумент10 страницControl Plantaanyelo_08Оценок пока нет
- PCMДокумент18 страницPCMAlberto Balcazar SaenzОценок пока нет
- Memoria Calculo Estructural Graderias ColiseoДокумент15 страницMemoria Calculo Estructural Graderias Coliseodamc32180% (5)
- Practica Calificada No 2 Control II EE648N 2021-IIIДокумент5 страницPractica Calificada No 2 Control II EE648N 2021-IIIJorge TarquiОценок пока нет
- TP 1Документ6 страницTP 1Juani RapinoОценок пока нет
- Segundo Taller de Control Ball and BeamДокумент16 страницSegundo Taller de Control Ball and BeamJosé Luis Flórez MantillaОценок пока нет
- Taller Modelado Matlab PDFДокумент16 страницTaller Modelado Matlab PDFJose BaqueroОценок пока нет
- Obras 2parcial FINALДокумент27 страницObras 2parcial FINALCaroline SosaОценок пока нет
- Diseño de Controlador Mediante Método de Parametrización AfínДокумент5 страницDiseño de Controlador Mediante Método de Parametrización AfínEduardo DuqueОценок пока нет
- MetodosДокумент7 страницMetodosJhonnPercyQuispeCondoriОценок пока нет
- Practica A Con EviewsДокумент28 страницPractica A Con Eviewsclbaez200050% (2)
- Control2 2Документ53 страницыControl2 2Walter Medina LopezОценок пока нет
- Control TemperaturaДокумент6 страницControl Temperaturajrockb1234Оценок пока нет
- Control Practica 5Документ5 страницControl Practica 5Alberto BetancurОценок пока нет
- Control Automatico 1Документ15 страницControl Automatico 1Gabriel VeraОценок пока нет
- Fase 2 - Andres Peña - 66Документ26 страницFase 2 - Andres Peña - 66Elida Rosana Romero Peralta100% (2)
- Calculo Corto CircuitoДокумент2 страницыCalculo Corto CircuitoVictor Camacho AmadorОценок пока нет
- Tableros Simuladores para PLC Siemens S7-200 PDFДокумент174 страницыTableros Simuladores para PLC Siemens S7-200 PDFMonickaferОценок пока нет
- Memoria TecnicaДокумент11 страницMemoria TecnicaJosé Luis Torres SánchezОценок пока нет
- Diagrama Uniflar SubestacionДокумент1 страницаDiagrama Uniflar SubestacionVictor Camacho AmadorОценок пока нет
- Pic 16f84aДокумент28 страницPic 16f84aVictor Camacho AmadorОценок пока нет
- Informe FinalДокумент81 страницаInforme FinalVictor Camacho Amador100% (1)
- Guia PLC Basico FestoДокумент27 страницGuia PLC Basico FestoJorge ManuelОценок пока нет
- Programación Con Win FSTДокумент153 страницыProgramación Con Win FSTEdison Tapasco100% (1)
- Alarma SismicaДокумент15 страницAlarma SismicaVictor Camacho Amador0% (1)
- MD ElectricasДокумент3 страницыMD ElectricasLuisAlbertoОценок пока нет
- Trabajo Práctico de Mantenimiento EléctricoДокумент2 страницыTrabajo Práctico de Mantenimiento EléctricoSergio ArceОценок пока нет
- Ats Energizar Contenedores-2Документ54 страницыAts Energizar Contenedores-2Luis CarlosОценок пока нет
- Ensayo de Automatizacion Y ControlДокумент5 страницEnsayo de Automatizacion Y ControlKrishna Amish SolisОценок пока нет
- Tds Total Fluidmatic-D3 TCQ 202011 Es EspДокумент2 страницыTds Total Fluidmatic-D3 TCQ 202011 Es Espcamilo ZambranoОценок пока нет
- Diseño de Cohetes, Sistema de RecuperaciónДокумент87 страницDiseño de Cohetes, Sistema de RecuperaciónLuisa NavarroОценок пока нет
- 20122sicq000188 2Документ22 страницы20122sicq000188 2edgar yadhir perez hernandezОценок пока нет
- Brochure in Ser CorДокумент40 страницBrochure in Ser Corangel_goyésОценок пока нет
- Punto 1 - Laura QuinteroДокумент3 страницыPunto 1 - Laura QuinteroCamiloОценок пока нет
- AMEFДокумент11 страницAMEFJhonОценок пока нет
- Suelos EspecialesДокумент59 страницSuelos EspecialesZohar D. ML100% (1)
- Wps BlancoДокумент2 страницыWps BlancoChristian GramОценок пока нет
- Rotulo Gas Propano - EmulsionДокумент2 страницыRotulo Gas Propano - EmulsionAquatro ArquitecturaОценок пока нет
- Autorizacion Trabajos de Alto Riesgo 25-08-2021Документ2 страницыAutorizacion Trabajos de Alto Riesgo 25-08-2021Daniel Alejandro Abastoflor FuentesОценок пока нет
- Teoria de La Programacion de Las Emisoras de RadiocontrolДокумент7 страницTeoria de La Programacion de Las Emisoras de RadiocontrolJOSE ANTONIO ANDREU FERNANDEZОценок пока нет
- Unua Muestra de Nitrogeno Gaseoso Contenido en Un Recipiente Con Un Volumen de 2Документ3 страницыUnua Muestra de Nitrogeno Gaseoso Contenido en Un Recipiente Con Un Volumen de 2Esteban Zuñiga SurriabreОценок пока нет
- Unidad 1. Respiración: Tema 1: Gases en El Aire Y en El Agua. Sistemas Respiratorios. Tipos de Sistemas RespiratoriosДокумент10 страницUnidad 1. Respiración: Tema 1: Gases en El Aire Y en El Agua. Sistemas Respiratorios. Tipos de Sistemas RespiratoriosClara Muñoz PartidaОценок пока нет
- PlanillaДокумент2 страницыPlanillayessenia aquije floresОценок пока нет
- Requisitos para Planos de UbicaciónДокумент2 страницыRequisitos para Planos de UbicaciónArmando HSОценок пока нет
- Tema 5 Momento de Inercia. Radio de Giro y Momento Resistente.Документ5 страницTema 5 Momento de Inercia. Radio de Giro y Momento Resistente.Jakeline GomezОценок пока нет
- Ola de Calor en El OesteДокумент8 страницOla de Calor en El OesteLuis Pereda RОценок пока нет
- Mapa Conceptual NSR 10Документ7 страницMapa Conceptual NSR 10Juan Manuel Torres JimenezОценок пока нет
- Tutorial de Visual Studio 2005 y SQL Server 2005 PDFДокумент60 страницTutorial de Visual Studio 2005 y SQL Server 2005 PDFdjrojas2512Оценок пока нет
- 2-Modelos de Fractura HidráulicaДокумент7 страниц2-Modelos de Fractura HidráulicarubenОценок пока нет
- Reductores de VelocidadДокумент7 страницReductores de VelocidadJIAMPIERO BONILLA BANCESОценок пока нет
- Formato Seguimiento Proyectos Subd. Infraestructura en Salud - AgoДокумент3 страницыFormato Seguimiento Proyectos Subd. Infraestructura en Salud - Agoangieserranop20Оценок пока нет
- Construcción Del Puente Alton Sobre El Río MississippiДокумент2 страницыConstrucción Del Puente Alton Sobre El Río MississippiPaula Andrea Fonseca BaronОценок пока нет
- Resumen RCDFДокумент25 страницResumen RCDFJr RamónОценок пока нет
- Procedimientos WLДокумент23 страницыProcedimientos WLChristian Lachira MedinaОценок пока нет
- Analisis de Sistemas Finol Llinas RosalesДокумент116 страницAnalisis de Sistemas Finol Llinas RosalesmisgleidyОценок пока нет
- La causa raiz de los accidentes: Historias de accidentes en la industriaОт EverandLa causa raiz de los accidentes: Historias de accidentes en la industriaРейтинг: 5 из 5 звезд5/5 (1)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialОт EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialРейтинг: 4.5 из 5 звезд4.5/5 (10)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasОт EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasРейтинг: 4.5 из 5 звезд4.5/5 (14)
- Manual técnico para la interpretación de análisis de suelos y fertilización de cultivosОт EverandManual técnico para la interpretación de análisis de suelos y fertilización de cultivosРейтинг: 4 из 5 звезд4/5 (1)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadОт EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadРейтинг: 5 из 5 звезд5/5 (1)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónОт EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónРейтинг: 5 из 5 звезд5/5 (1)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalОт EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalРейтинг: 5 из 5 звезд5/5 (3)
- Guía práctica para la refracción ocularОт EverandGuía práctica para la refracción ocularРейтинг: 5 из 5 звезд5/5 (2)
- 100 circuitos de shields para arduino (español)От Everand100 circuitos de shields para arduino (español)Рейтинг: 3.5 из 5 звезд3.5/5 (3)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasОт EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasРейтинг: 5 из 5 звезд5/5 (4)
- Inteligencia artificial: Análisis de datos e innovación para principiantesОт EverandInteligencia artificial: Análisis de datos e innovación para principiantesРейтинг: 4 из 5 звезд4/5 (3)
- Ingeniería de Sonido. Conceptos, fundamentos y casos prácticos: CINE, TELEVISIÓN Y RADIOОт EverandIngeniería de Sonido. Conceptos, fundamentos y casos prácticos: CINE, TELEVISIÓN Y RADIOРейтинг: 4.5 из 5 звезд4.5/5 (8)
- Investigación sistémica de accidentes: Modelo para el transporte y la gestión de riesgos en sistemas complejosОт EverandInvestigación sistémica de accidentes: Modelo para el transporte y la gestión de riesgos en sistemas complejosРейтинг: 5 из 5 звезд5/5 (1)
- Electrocardiograma desde una visión digitalОт EverandElectrocardiograma desde una visión digitalРейтинг: 4 из 5 звезд4/5 (1)
- La Vida Útil de los Alimentos y sus Principales Reacciones: ¿Qué pasa en los alimentos con el tiempo?От EverandLa Vida Útil de los Alimentos y sus Principales Reacciones: ¿Qué pasa en los alimentos con el tiempo?Рейтинг: 2 из 5 звезд2/5 (1)