Вам также может понравиться
- FCE Paper 2 WritingДокумент29 страницFCE Paper 2 WritingTuyet Quach AnhОценок пока нет
- Cromo CapituloДокумент20 страницCromo CapituloAngel LopezОценок пока нет
- Cromo CapituloДокумент20 страницCromo CapituloAngel LopezОценок пока нет
- Toefl PDFДокумент2 страницыToefl PDFFelipe SuárezОценок пока нет
- G0146 03Документ6 страницG0146 03wellbeingempireОценок пока нет
- Digital Data Acquisition in Wear and Friction Measurements: Standard Guide ForДокумент3 страницыDigital Data Acquisition in Wear and Friction Measurements: Standard Guide ForwellbeingempireОценок пока нет
- Astm G171 PDFДокумент7 страницAstm G171 PDFGAVILANES MARTINEZ GEISSON ANIBAL0% (1)
- Help PDFДокумент276 страницHelp PDFFelipe SuárezОценок пока нет
- 5035dc Volt Amp MeterДокумент3 страницы5035dc Volt Amp MeterFelipe SuárezОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Accident Investigation ReportДокумент59 страницAccident Investigation ReportSunStar Philippine News67% (3)
- Air Cargo StudyДокумент115 страницAir Cargo StudyClifford Nyathi100% (2)
- Cara Terbang Boeng 737-800Документ16 страницCara Terbang Boeng 737-800DwiWijayantoWichenkОценок пока нет
- Charles Spence-AIM FAR 2008 - Aeronautical Information Manual Federal Aviation Regulations (2007)Документ1 024 страницыCharles Spence-AIM FAR 2008 - Aeronautical Information Manual Federal Aviation Regulations (2007)Sebastian CotinghiuОценок пока нет
- Boeing Current Market Outlook 2012Документ43 страницыBoeing Current Market Outlook 2012VaibhavОценок пока нет
- HITT A-SMGCS System ContextДокумент25 страницHITT A-SMGCS System ContextRecep çelikОценок пока нет
- Enhancing airport operations worldwide with cutting-edge Passenger Boarding BridgesДокумент8 страницEnhancing airport operations worldwide with cutting-edge Passenger Boarding BridgesCarylJaneVeriñaОценок пока нет
- Manali Trip PlanДокумент4 страницыManali Trip Planjinkaprasad22Оценок пока нет
- Jeppview For Windows: List of Pages in This Trip KitДокумент19 страницJeppview For Windows: List of Pages in This Trip KitMiodi Meeow HauganОценок пока нет
- Ne MapДокумент700 страницNe MapRonald KendallОценок пока нет
- Surat Cuti IsipДокумент4 страницыSurat Cuti IsipPulong Wijang PralampitaОценок пока нет
- Atlantic 8un Airways CAT A Pilot Procedures for CRJ-200Документ9 страницAtlantic 8un Airways CAT A Pilot Procedures for CRJ-200spunk2meОценок пока нет
- CIRC 314-AN 178 INP EN EDENPROD 195309 v1Документ34 страницыCIRC 314-AN 178 INP EN EDENPROD 195309 v1xloriki_100% (1)
- The Abidjan Airport Concession Facing Regional Aviation LiberationДокумент12 страницThe Abidjan Airport Concession Facing Regional Aviation LiberationOmotola AwojobiОценок пока нет
- 2008 Burning Man Stipulation Monitoring ReportДокумент113 страниц2008 Burning Man Stipulation Monitoring ReportBURNcastОценок пока нет
- Covid-19 Protocol On Crew Change and Repatriation of SeafarersДокумент19 страницCovid-19 Protocol On Crew Change and Repatriation of SeafarersPaingОценок пока нет
- Scope of Business Analytics in Transformation of Aviation Sector - AshuДокумент1 страницаScope of Business Analytics in Transformation of Aviation Sector - AshuRitika SharmaОценок пока нет
- Gatwick Air BridgeДокумент7 страницGatwick Air BridgemrasdanОценок пока нет
- Aipbd NewДокумент506 страницAipbd Newsadman joyОценок пока нет
- Runway Weather Information System (RWIS) : FeaturesДокумент2 страницыRunway Weather Information System (RWIS) : FeaturesSimona NicoletaОценок пока нет
- KisMAC ManualДокумент7 страницKisMAC ManualecocadecОценок пока нет
- JetBlue University Orlando Airport ShuttleДокумент1 страницаJetBlue University Orlando Airport ShuttleLeighWhiteОценок пока нет
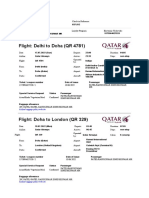
- Flight: Delhi To Doha (QR 4781) : Airline Baggage Policy WebsiteДокумент3 страницыFlight: Delhi To Doha (QR 4781) : Airline Baggage Policy WebsiteNeeraj ChawlaОценок пока нет
- 14 CFR 61.87 - Solo Requirements For Student Pilots. - CFR - US Law - LII: Legal Information InstituteДокумент13 страниц14 CFR 61.87 - Solo Requirements For Student Pilots. - CFR - US Law - LII: Legal Information InstituteDanielОценок пока нет
- FAA Airports Part 139 ChecklistДокумент3 страницыFAA Airports Part 139 ChecklistMarco Duarte100% (2)
- Manual On Civil Aviation Jet Fuel Supply ICAOДокумент46 страницManual On Civil Aviation Jet Fuel Supply ICAOtiualbert8729100% (6)
- McqsДокумент20 страницMcqsZia Ur RehmanОценок пока нет
- TestДокумент138 страницTestRiz FirzaОценок пока нет
- OMDBДокумент61 страницаOMDBrezarachmatОценок пока нет
- Gmail - IndiGo ItineraryДокумент5 страницGmail - IndiGo ItineraryAbhinash SinghОценок пока нет