Вам также может понравиться
- DVP04AD-S: Instruction SheetДокумент2 страницыDVP04AD-S: Instruction SheetCLAUDIO0% (1)
- DELTA - IA PLC - DVP PLC S H2 H3 Series - MDM - EN - 20131112 PDFДокумент344 страницыDELTA - IA PLC - DVP PLC S H2 H3 Series - MDM - EN - 20131112 PDFEnrique Francisco WekwertОценок пока нет
- Delta PLC Analog Input Module Dvp04ad SДокумент2 страницыDelta PLC Analog Input Module Dvp04ad Sbebe_roalbaОценок пока нет
- 04da SДокумент2 страницы04da SasyfingОценок пока нет
- Delta Ia-Plc DVP TP C en 20160922Документ48 страницDelta Ia-Plc DVP TP C en 20160922max_ingОценок пока нет
- FBs Special Relay Register List ENДокумент19 страницFBs Special Relay Register List ENAmmar Al-KindyОценок пока нет
- Delta Ia-Plc DVP TP C en 20160922Документ48 страницDelta Ia-Plc DVP TP C en 20160922max_ingОценок пока нет
- DELTA IA-HMI DOP-Series C EN 20160321 PDFДокумент28 страницDELTA IA-HMI DOP-Series C EN 20160321 PDFminlwintheinОценок пока нет
- Fatek Fb/Fbs/B1/B1Z Series: Hmi SettingДокумент12 страницFatek Fb/Fbs/B1/B1Z Series: Hmi SettingAmmar Al-KindyОценок пока нет
- Catalogo Fatek Plcs b1b1z - en 2018Документ8 страницCatalogo Fatek Plcs b1b1z - en 2018Fernando BalsecaОценок пока нет
- B1/B1z/HB1 Model List: Module Name SpecificationДокумент2 страницыB1/B1z/HB1 Model List: Module Name SpecificationAmmar Al-KindyОценок пока нет
- Chapter 2 FBS-PLC Memory AllocationДокумент18 страницChapter 2 FBS-PLC Memory AllocationAmmar Al-KindyОценок пока нет
- Fatek Fb/Fbs/B1/B1Z Series: Hmi SettingДокумент12 страницFatek Fb/Fbs/B1/B1Z Series: Hmi SettingAmmar Al-KindyОценок пока нет
- Manual Winproladder (PLC's FATEK)Документ195 страницManual Winproladder (PLC's FATEK)José Luis Aros RiveraОценок пока нет
- mayada5977 مهمДокумент7 страницmayada5977 مهمAmmar Al-KindyОценок пока нет
- may992 حسابات مهمة PDFДокумент6 страницmay992 حسابات مهمة PDFAmmar Al-KindyОценок пока нет
- Tipos de BateríasДокумент5 страницTipos de BateríasIvann Linkink TorresОценок пока нет
- Manual Winproladder (PLC's FATEK)Документ195 страницManual Winproladder (PLC's FATEK)José Luis Aros RiveraОценок пока нет
- An Offline Trained Artificial Neural Network To Predict A Photovoltaic Panel Maximum Power PointДокумент3 страницыAn Offline Trained Artificial Neural Network To Predict A Photovoltaic Panel Maximum Power PointAmmar Al-KindyОценок пока нет
- may911 مهم جدا مودلنك سكادا ستيت اوف جارجДокумент8 страницmay911 مهم جدا مودلنك سكادا ستيت اوف جارجAmmar Al-KindyОценок пока нет
- Introduction To Control Theory PDFДокумент8 страницIntroduction To Control Theory PDFAmmar Al-KindyОценок пока нет
- Hussain Kassim Ahmad (Thesis) .pdf اطروحه dfig PDFДокумент157 страницHussain Kassim Ahmad (Thesis) .pdf اطروحه dfig PDFAmmar Al-KindyОценок пока нет
- balijepalli2017.pdf سولر جديدДокумент12 страницbalijepalli2017.pdf سولر جديدAmmar Al-KindyОценок пока нет
- Supervisory Control and Data Acquisition (SCADA) Section3-2019 PDFДокумент13 страницSupervisory Control and Data Acquisition (SCADA) Section3-2019 PDFAmmar Al-KindyОценок пока нет
- א א א א J J J J א א א א אא אא אא אא !"א#"א$%& !"א#"א$%& !"א#"א$%& !"א#"א$%& Ffff ٣٥١١ ٣٥١١ ٣٥١١ ٣٥١١ Eeee ,,,, Kkkk ./ 0123& ./ 0123& ./ 0123& ./ 0123&Документ21 страницаא א א א J J J J א א א א אא אא אא אא !"א#"א$%& !"א#"א$%& !"א#"א$%& !"א#"א$%& Ffff ٣٥١١ ٣٥١١ ٣٥١١ ٣٥١١ Eeee ,,,, Kkkk ./ 0123& ./ 0123& ./ 0123& ./ 0123&Ammar Al-KindyОценок пока нет
- Introduction To Control Theory PDFДокумент8 страницIntroduction To Control Theory PDFAmmar Al-KindyОценок пока нет
- PS I UnitДокумент22 страницыPS I UnitrameshОценок пока нет
- Supervisory Control and Data Acquisition (SCADA) Section2-2019 PDFДокумент24 страницыSupervisory Control and Data Acquisition (SCADA) Section2-2019 PDFAmmar Al-KindyОценок пока нет
- Honeywell Dcs ArchitectureДокумент14 страницHoneywell Dcs ArchitectureVanama MalaiОценок пока нет
- Supervisory Control and Data Acquisition (SCADA) Section2-2019 PDFДокумент24 страницыSupervisory Control and Data Acquisition (SCADA) Section2-2019 PDFAmmar Al-KindyОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
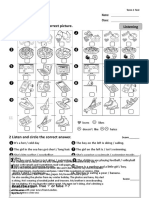
- 1 Listen and Tick The Correct Picture. Listening: Term 1 TestДокумент5 страниц1 Listen and Tick The Correct Picture. Listening: Term 1 TestSusanaFernándezОценок пока нет
- Alchemy of LightДокумент16 страницAlchemy of LightStephen WrightОценок пока нет
- Olympus Cix Series: Explanation of The International Standards For Technical CleanlinessДокумент24 страницыOlympus Cix Series: Explanation of The International Standards For Technical CleanlinessLOGANATHAN VОценок пока нет
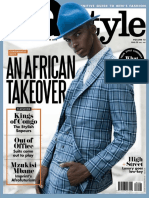
- GQ StyleДокумент100 страницGQ StyleDaniel ConradieОценок пока нет
- Natasha Jha-CvДокумент2 страницыNatasha Jha-Cvapi-349002748Оценок пока нет
- Ikelite Catalog 09augДокумент8 страницIkelite Catalog 09augIndra Aira PermanaОценок пока нет
- ADJAYEДокумент16 страницADJAYEJose BalsasОценок пока нет
- The Mechanisms of Formation of W e L D Defects in High-Frequency Electric Resistance W e L D I N GДокумент6 страницThe Mechanisms of Formation of W e L D Defects in High-Frequency Electric Resistance W e L D I N Gilze86Оценок пока нет
- IRM - Rev I - Final - 9-24-18Документ50 страницIRM - Rev I - Final - 9-24-18ÖNDER ÖZKANОценок пока нет
- String Pedagogy in Method Books PresentationДокумент12 страницString Pedagogy in Method Books Presentationapi-426130330Оценок пока нет
- Roya Shams - Afghan TeenДокумент4 страницыRoya Shams - Afghan Teenapi-202412886Оценок пока нет
- Seatwork (Photo 2)Документ4 страницыSeatwork (Photo 2)BreeОценок пока нет
- School of English : Tense RevisionДокумент3 страницыSchool of English : Tense RevisionLau VidelaОценок пока нет
- LectureNotes Ilovepdf Compressed Ilovepdf Compressed PDFДокумент237 страницLectureNotes Ilovepdf Compressed Ilovepdf Compressed PDFAnonymous 9c6pNjdОценок пока нет
- Introduction To 10 Metre Air PistolДокумент21 страницаIntroduction To 10 Metre Air PistolAngad Arneja100% (1)
- Brand EquityДокумент40 страницBrand EquityRubi MalikОценок пока нет
- A Good Man Is Hard To Find by Flannery O'Connor EssayДокумент4 страницыA Good Man Is Hard To Find by Flannery O'Connor EssayAnonymous OP6R1ZSОценок пока нет
- David Hurn, Bill Jay On Being A Photographer A Practical Guide PDFДокумент97 страницDavid Hurn, Bill Jay On Being A Photographer A Practical Guide PDFSebastian Girando100% (3)
- CH 17 AnswersДокумент19 страницCH 17 AnswersmashaelОценок пока нет
- TN A2 Level Units 1-5 ExamДокумент5 страницTN A2 Level Units 1-5 ExamUserMotMoo0% (2)
- Animal SensesДокумент35 страницAnimal SensesYulinar FawanysОценок пока нет
- Foreign Office Contract For Our Man In...Документ10 страницForeign Office Contract For Our Man In...SpyCultureОценок пока нет
- 2.0 Democratic National Committee - NDECC-2 PDFДокумент12 страниц2.0 Democratic National Committee - NDECC-2 PDFAnonymous 2DV1oj6jYOОценок пока нет
- They Had Always Called It The Green RiverДокумент2 страницыThey Had Always Called It The Green RiverAndre Luiz JuniorОценок пока нет
- 3d Environment HandbookДокумент39 страниц3d Environment Handbookapi-278085794Оценок пока нет
- Parts Manual M5526cdwДокумент78 страницParts Manual M5526cdwabm503181Оценок пока нет
- Grafički DizajnДокумент40 страницGrafički Dizajnsanjalica1Оценок пока нет
- Characteristics and Statistics of Digital Remote Sensing ImageryДокумент8 страницCharacteristics and Statistics of Digital Remote Sensing ImageryMano DragonОценок пока нет
- FSMC TFTLCD DmaДокумент21 страницаFSMC TFTLCD Dmagonzon13Оценок пока нет
- Inspection of CastingДокумент23 страницыInspection of CastingRaghu SanthОценок пока нет