Вам также может понравиться
- Trabalho de Motor de PassoДокумент23 страницыTrabalho de Motor de Passosaulomachado8262Оценок пока нет
- Cálculo do diâmetro de polias para bombasДокумент5 страницCálculo do diâmetro de polias para bombasAlianderson lopesОценок пока нет
- Dimensionamento de mesa pantográficaДокумент111 страницDimensionamento de mesa pantográficaRodrigo Teixeira100% (1)
- Fornecedores de redutores, motores e equipamentos industriaisДокумент96 страницFornecedores de redutores, motores e equipamentos industriaisJoão Ricardo StepienОценок пока нет
- Guia completo para instalação, operação e manutenção de guincho de arrasteДокумент14 страницGuia completo para instalação, operação e manutenção de guincho de arrasteNOIVODALAGOAОценок пока нет
- Montagens e DesmontagensДокумент104 страницыMontagens e DesmontagensAntonio RodriguesОценок пока нет
- Acpl de Correntes PDFДокумент1 страницаAcpl de Correntes PDFFernando DallagnoloОценок пока нет
- Manual07jun09 CorrenteДокумент19 страницManual07jun09 CorrenteKlebersonRamosОценок пока нет
- Controle de Máquinas Disponibilidade & Incidencias SGL I Template 2020Документ533 страницыControle de Máquinas Disponibilidade & Incidencias SGL I Template 2020Jeimav JeielОценок пока нет
- Manual 297Документ20 страницManual 297renanslivaОценок пока нет
- Força de PrensagemДокумент10 страницForça de PrensagemPauloОценок пока нет
- Acionamento de bombas por polias e correiasДокумент3 страницыAcionamento de bombas por polias e correiaswanderlei22_pr3116Оценок пока нет
- Guindaste Giratório - ProjetoДокумент18 страницGuindaste Giratório - Projetodilonvieira7Оценок пока нет
- Relatório Calibragem de VálvulasДокумент12 страницRelatório Calibragem de VálvulasdanielwjuniorОценок пока нет
- Acoplamentos Elasticos Metalflex Am-10 PDFДокумент2 страницыAcoplamentos Elasticos Metalflex Am-10 PDFDouglas TondelloОценок пока нет
- Motores de Indução Trifásicos: Partida e Circuito EquivalenteДокумент56 страницMotores de Indução Trifásicos: Partida e Circuito Equivalentedriano22100% (1)
- RP 1009101 PDFДокумент20 страницRP 1009101 PDFDalila VaroghОценок пока нет
- Ficha Tecnica - QUARD 450Документ2 страницыFicha Tecnica - QUARD 450mazuckОценок пока нет
- Abnt Resistencia Parafusos PDFДокумент10 страницAbnt Resistencia Parafusos PDFrichard_pfОценок пока нет
- ManutfuncmaqsoldaДокумент18 страницManutfuncmaqsoldaneto-porto100% (2)
- Dimensionamento Escapamento1Документ95 страницDimensionamento Escapamento1Julio Mazzei MazaОценок пока нет
- GuindasteДокумент36 страницGuindasteAlexandre TeixeiraОценок пока нет
- Guindaste QY50C com capacidade de elevação de 50 toneladasДокумент12 страницGuindaste QY50C com capacidade de elevação de 50 toneladasAndré SilvaОценок пока нет
- Sistemas de transmissãoДокумент35 страницSistemas de transmissãoLeanderson VieiraОценок пока нет
- Sistema Hidráulico de Escavadeira - Projeto de Conclusão de SemestreДокумент3 страницыSistema Hidráulico de Escavadeira - Projeto de Conclusão de SemestreJessica LeiteОценок пока нет
- ABNT NBR 8407 Ensaios Não Destrutivos - Líquido Penetrante - Detecção de DescontinuidadesДокумент25 страницABNT NBR 8407 Ensaios Não Destrutivos - Líquido Penetrante - Detecção de DescontinuidadesVitor Soares Antunes100% (1)
- Manuais de operação e manutenção de equipamentos de elevaçãoДокумент40 страницManuais de operação e manutenção de equipamentos de elevaçãoJuliana DottoОценок пока нет
- Martelos H110E H130EДокумент8 страницMartelos H110E H130Epaimporcate100% (1)
- Manual K30 v6.04Документ60 страницManual K30 v6.04Thiago CostaОценок пока нет
- MTBF: Um indicador de confiabilidadeДокумент10 страницMTBF: Um indicador de confiabilidadeAlexandre SilvaОценок пока нет
- Correias VДокумент1 страницаCorreias Vmrs13silveiraОценок пока нет
- Adaptação de locomotivas SD 40 para bitola métricaДокумент13 страницAdaptação de locomotivas SD 40 para bitola métricaRicardo JuniorОценок пока нет
- Motor Eletrico WEG PDFДокумент9 страницMotor Eletrico WEG PDFregibahiaОценок пока нет
- Calculo Transportador HelicoidalДокумент4 страницыCalculo Transportador HelicoidalJunior De Deus100% (1)
- WEG w22 Motofreio Catalogo Tecnico 50048538 Catalogo Portugues BRДокумент24 страницыWEG w22 Motofreio Catalogo Tecnico 50048538 Catalogo Portugues BRLucas Vinícius CostaОценок пока нет
- Estudo de viabilidade da viga de ponte rolante enrijecidaДокумент22 страницыEstudo de viabilidade da viga de ponte rolante enrijecidaMauro AnzolinОценок пока нет
- Vibração livre de sistemas 1 GDLДокумент241 страницаVibração livre de sistemas 1 GDLRafael MatosОценок пока нет
- Correntes TransmissãoДокумент41 страницаCorrentes TransmissãosiguinolfiОценок пока нет
- Comando ValvulaДокумент7 страницComando ValvulaPedro RelaОценок пока нет
- Redutor cilíndrico helicoidal para motores elétricosДокумент10 страницRedutor cilíndrico helicoidal para motores elétricosedssonleite-1Оценок пока нет
- Ferramentas Torque Indústria AutomotivaДокумент21 страницаFerramentas Torque Indústria Automotivathebob808100% (1)
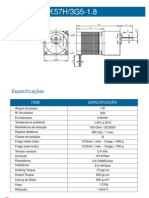
- AK57H/3G5-1.8 Motor EspecificaçõesДокумент2 страницыAK57H/3G5-1.8 Motor EspecificaçõesmozolnandoОценок пока нет
- Lista de Exercícios de Dimensionamento Hidráulico - SHP 2019Документ1 страницаLista de Exercícios de Dimensionamento Hidráulico - SHP 2019Emerson souzaОценок пока нет
- Transmissão Por Correntes de RolosДокумент16 страницTransmissão Por Correntes de RolospaulohkОценок пока нет
- 02-Dimensionamento de EixosДокумент21 страница02-Dimensionamento de EixosMarcelo José CividiniОценок пока нет
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoОт EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoОценок пока нет
- Controle De Motor De Passo Unipolar E Bipolar Com Base No Pic18f1220 E MikrocОт EverandControle De Motor De Passo Unipolar E Bipolar Com Base No Pic18f1220 E MikrocОценок пока нет
- Programação Em Assembly Para O Microcontrolador Pic12f Volume IОт EverandProgramação Em Assembly Para O Microcontrolador Pic12f Volume IРейтинг: 5 из 5 звезд5/5 (1)
- Apostila Física CEFET PDFДокумент108 страницApostila Física CEFET PDFFísica Concurso Vestibular93% (14)
- Fundamentos de Eletromagnetismo - CEFET-SCДокумент127 страницFundamentos de Eletromagnetismo - CEFET-SCEletrofisic100% (2)
- Apostila CPICДокумент192 страницыApostila CPICRenato LopesОценок пока нет
- Apostila Física CEFET PDFДокумент108 страницApostila Física CEFET PDFFísica Concurso Vestibular93% (14)
- Apostila Pic 16f84 16f628Документ100 страницApostila Pic 16f84 16f628luizbertini912100% (11)
- Pimentel Pires 1992 Metodologias de Avaliacao de I 14095Документ13 страницPimentel Pires 1992 Metodologias de Avaliacao de I 14095dchampion1Оценок пока нет
- Circuitos ComparadoresДокумент11 страницCircuitos Comparadoreslinharesjr100% (1)
- Curso Microcontrolador Pic18fДокумент312 страницCurso Microcontrolador Pic18fClovis Rodrigues89% (9)
- Microcontroladores: Peças Centrais de Inúmeros DispositivosДокумент34 страницыMicrocontroladores: Peças Centrais de Inúmeros DispositivosAlcy Monteiro JrОценок пока нет
- Manual ICD2-BR-2007.Jun Rev. 08Документ62 страницыManual ICD2-BR-2007.Jun Rev. 08Marcelo Silva Alves100% (1)
- Apostila ArduinoДокумент36 страницApostila Arduinoleidival_oliveira3719Оценок пока нет
- Aula5 SQLДокумент7 страницAula5 SQLMarcos AntonioОценок пока нет
- CFMoto 625Документ201 страницаCFMoto 625fastoreldaОценок пока нет
- Manual de serviço lavadora 6kgДокумент27 страницManual de serviço lavadora 6kgJúlio Eduardo Fonseca Pereira100% (1)
- Aspirador de pó industrial potenteДокумент24 страницыAspirador de pó industrial potenteAnonymous ZalAqh6Оценок пока нет
- Sistema DieselДокумент1 страницаSistema DieselHernan F GodoyОценок пока нет
- 16.684 Tanque de Consumo Aéreo para Grupos GeradoresДокумент27 страниц16.684 Tanque de Consumo Aéreo para Grupos GeradoresBruno RibeiroОценок пока нет
- Manual Alternador Brushless GeradoresriopretoДокумент28 страницManual Alternador Brushless GeradoresriopretoJoão FranciscoОценок пока нет
- Motorização de Máquinas - 18 PlanilhasДокумент101 страницаMotorização de Máquinas - 18 PlanilhaseversonsolomaoОценок пока нет
- Manual Instruções 370EДокумент211 страницManual Instruções 370EAnttonio100% (2)
- C500D6 PT Rev03Документ4 страницыC500D6 PT Rev03JOÃO LIMAОценок пока нет
- Manual MotoristaДокумент5 страницManual MotoristaludeirjuniorОценок пока нет
- Leitura de Placa de Identificação de Motores Elétricos Trifásico - TreinamentoДокумент22 страницыLeitura de Placa de Identificação de Motores Elétricos Trifásico - TreinamentoAdriano ValoisОценок пока нет
- ApostilaCap1V2007 PDFДокумент13 страницApostilaCap1V2007 PDFAntonio Adalto AltomaniОценок пока нет
- PC240 4a062c4274Документ16 страницPC240 4a062c4274Victor PereiraОценок пока нет
- ManualGeradorGMDGTD5000 7000EДокумент10 страницManualGeradorGMDGTD5000 7000EFabio BrunoОценок пока нет
- Especificações GeradorДокумент3 страницыEspecificações GeradorozllyОценок пока нет
- Omega Plano de Manutencao PreventivaДокумент11 страницOmega Plano de Manutencao PreventivaEdson ZuchettoОценок пока нет
- UntitledДокумент507 страницUntitledRicardo RangelОценок пока нет
- Projeto e fabricação de resfriador a arДокумент30 страницProjeto e fabricação de resfriador a arEzequiel CastilhoniОценок пока нет
- Tecnico ZJ 0303L 3 D4 02Документ12 страницTecnico ZJ 0303L 3 D4 02CLAUDINÉIA APARECIDA DA COSTAОценок пока нет
- Bomba Injetora OM 447Документ10 страницBomba Injetora OM 447edivaldo3veronese92% (13)
- Instalação, operação e manutenção GMG CumminsДокумент49 страницInstalação, operação e manutenção GMG CumminsMarcelo Correa Dos Santos100% (4)
- Gr-700ex - Ficha Tecnico Do TadanoДокумент12 страницGr-700ex - Ficha Tecnico Do TadanoiksolovОценок пока нет
- Mercedes Classe C Cabrio 2018 Setembro A205 Comand Manual de Instruções 01Документ629 страницMercedes Classe C Cabrio 2018 Setembro A205 Comand Manual de Instruções 01maiellopessoapessoaОценок пока нет
- Guia de Parametrizao VACON NXPДокумент18 страницGuia de Parametrizao VACON NXPtiago paulaОценок пока нет
- Manual de MuckДокумент40 страницManual de MuckCamila Micalski100% (3)
- Brochure l110f l120f t3 PT BR 83 20000894 eДокумент32 страницыBrochure l110f l120f t3 PT BR 83 20000894 eHugo Manuel FerreiraОценок пока нет
- Catálogo de produtos e serviços para automóveisДокумент21 страницаCatálogo de produtos e serviços para automóveisThiago MatosОценок пока нет
- INSTRUÇÕES DE USO E MANUTENÇÃO de KartДокумент62 страницыINSTRUÇÕES DE USO E MANUTENÇÃO de KartLincoln AnnechinoОценок пока нет
- Problemas de Física ResolvidosДокумент15 страницProblemas de Física ResolvidosLuciano Rosa100% (1)
- Manual Manutencao g650GS Tom - OffroadДокумент5 страницManual Manutencao g650GS Tom - OffroadRaphael de Paula Rodrigues100% (1)