Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- USCVLSI VirtuosoTutorialДокумент45 страницUSCVLSI VirtuosoTutorialAnkit GohelОценок пока нет
- Elex Module 2Документ6 страницElex Module 2Chemuel Mardie G. ObedencioОценок пока нет
- Comparative Study of Parasitic Elements On RF Fom in 28 NM FD Soi and Bulk TechnologiesДокумент4 страницыComparative Study of Parasitic Elements On RF Fom in 28 NM FD Soi and Bulk TechnologiesNealОценок пока нет
- 11N90Документ7 страниц11N90rudra_1Оценок пока нет
- Field-Effect Transistors: 6.13 Summary TableДокумент3 страницыField-Effect Transistors: 6.13 Summary TableHoàng NguyễnОценок пока нет
- N Mosfet: Shenzhen Tuofeng Semiconductor Technology Co., LTDДокумент2 страницыN Mosfet: Shenzhen Tuofeng Semiconductor Technology Co., LTDJUANОценок пока нет
- CMOS Logic FamilyДокумент16 страницCMOS Logic FamilyAditya SahareОценок пока нет
- University of Zimbabwe: Power Electronics and Motion Control: Ee420Документ10 страницUniversity of Zimbabwe: Power Electronics and Motion Control: Ee420shania msipaОценок пока нет
- R 18 Be Ece III To Viii SemestersДокумент171 страницаR 18 Be Ece III To Viii SemestersharshaОценок пока нет
- Infineon BTS7012 2EPA DataSheet v01 - 10 ENДокумент63 страницыInfineon BTS7012 2EPA DataSheet v01 - 10 ENAlbertoGonzálezОценок пока нет
- Ob5269cp Ob5269cpa PDFДокумент11 страницOb5269cp Ob5269cpa PDFGiovanni Carrillo Villegas100% (1)
- Multilevel Inverter - Final Report - 14031208 PDFДокумент45 страницMultilevel Inverter - Final Report - 14031208 PDFUmar AkhtarОценок пока нет
- Psim ManualДокумент134 страницыPsim ManualJuan SotoОценок пока нет
- Lesson 6 Metal Oxide Semiconductor Field Effect Transistor (MOSFET)Документ30 страницLesson 6 Metal Oxide Semiconductor Field Effect Transistor (MOSFET)Chacko MathewОценок пока нет
- DSP Architecture Design EssentialsДокумент353 страницыDSP Architecture Design Essentialssup3rnarutoОценок пока нет
- Design and Implementation of Multiple Output Switch Mode Power SupplyДокумент6 страницDesign and Implementation of Multiple Output Switch Mode Power SupplyseventhsensegroupОценок пока нет
- Bsim1 Why?: B S I MДокумент28 страницBsim1 Why?: B S I Mapi-19772070Оценок пока нет
- CD4007M/CD4007C Dual Complementary Pair Plus Inverter: General Description FeaturesДокумент6 страницCD4007M/CD4007C Dual Complementary Pair Plus Inverter: General Description FeaturesjonvoidОценок пока нет
- AICДокумент21 страницаAICOzephSharifОценок пока нет
- Impact of Guard Ring Layout On The Stacked Low-Voltage PMOS For High-Voltage ESD ProtectionДокумент4 страницыImpact of Guard Ring Layout On The Stacked Low-Voltage PMOS For High-Voltage ESD ProtectionVikas JainОценок пока нет
- A CMOS Voltage ReferenceДокумент5 страницA CMOS Voltage ReferenceFernando Sanchez HernandezОценок пока нет
- Power Electronics - Unit-1 PDFДокумент44 страницыPower Electronics - Unit-1 PDFdeepu4303Оценок пока нет
- Know The Major Difference Between BJT and FETДокумент11 страницKnow The Major Difference Between BJT and FETabraham kaseyaОценок пока нет
- Implementation and Simulation of Half Bridge Series Resonant Inverter in Zero Voltage SwitchingДокумент5 страницImplementation and Simulation of Half Bridge Series Resonant Inverter in Zero Voltage Switchingwhite_lonelinessОценок пока нет
- DimpuДокумент27 страницDimpuDippu SihombingОценок пока нет
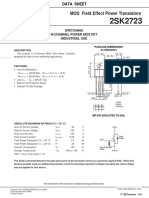
- MOS Field Effect Power Transistors: Switching N-Channel Power Mos Fet Industrial UseДокумент8 страницMOS Field Effect Power Transistors: Switching N-Channel Power Mos Fet Industrial UseAbel UrbinaОценок пока нет
- Company Profile Sample For Foundry Business PDFДокумент24 страницыCompany Profile Sample For Foundry Business PDFMohzin KmОценок пока нет
- Syllabus: Ufy12209Cdp Circuits and Devices Laboratory L T P CДокумент75 страницSyllabus: Ufy12209Cdp Circuits and Devices Laboratory L T P CvijayprasathmeОценок пока нет
- Mil HDBK 217f Notice 2Документ80 страницMil HDBK 217f Notice 2phanikrishna84Оценок пока нет
- Introduction - Underlying Science: PN JunctionДокумент14 страницIntroduction - Underlying Science: PN JunctionKhuram Shahzad KhalidОценок пока нет