Вам также может понравиться
- Practica 6 Multiplexor y DemultiplexorДокумент10 страницPractica 6 Multiplexor y DemultiplexorTorrealba Gerardo100% (1)
- Sistema Mínimo PDFДокумент4 страницыSistema Mínimo PDFJuan Pablo100% (1)
- HDLДокумент5 страницHDLdraven88Оценок пока нет
- 8284 Clock GeneratorДокумент4 страницы8284 Clock GeneratorKennyi Aro ApazaОценок пока нет
- Registros de desplazamiento y dispositivos lógicos programablesДокумент7 страницRegistros de desplazamiento y dispositivos lógicos programablescarranzabustinza50% (2)
- Controlador 8288Документ3 страницыControlador 8288Kevin Vladimir CarrilloОценок пока нет
- Flip Flops Con VHDLДокумент34 страницыFlip Flops Con VHDLPedro Landaeta0% (2)
- Sistemas MicroprocesadosДокумент36 страницSistemas Microprocesadosacro_09vОценок пока нет
- Examen Parcial de MicroprocesadoresДокумент3 страницыExamen Parcial de MicroprocesadoresJose Carlos SvОценок пока нет
- CONTADORES EN CASCADA ResumenДокумент6 страницCONTADORES EN CASCADA ResumenJoshua DelgadoОценок пока нет
- Estructura Del Controlador Lógico ProgramableДокумент3 страницыEstructura Del Controlador Lógico ProgramableCarlos CastilloОценок пока нет
- Cartas AsmДокумент12 страницCartas AsmOmar Bazán NavarroОценок пока нет
- Registros desplazamientoДокумент4 страницыRegistros desplazamientoDennis Montero JimenezОценок пока нет
- Circuito Integrado 555Документ7 страницCircuito Integrado 555luigis100% (14)
- Uso Del StackДокумент3 страницыUso Del StackElsa Edith Mtz Mojica100% (1)
- Tarea1 - Jose Angel Acosta - 31641017 - MICRO2Документ8 страницTarea1 - Jose Angel Acosta - 31641017 - MICRO2Angel Acosta Torres100% (3)
- Microprocesadores de 16 y 32 BitsДокумент13 страницMicroprocesadores de 16 y 32 BitsLuis Angel Casados Rodriguez100% (1)
- Memoria Ram y RomДокумент30 страницMemoria Ram y RomRosaFloresОценок пока нет
- Motor A Pasos ReporteДокумент13 страницMotor A Pasos ReporteEmmanuel Migueles Perdomo100% (1)
- Analógicas vs digitales, conversiones binarias, circuitos lógicosДокумент16 страницAnalógicas vs digitales, conversiones binarias, circuitos lógicosluisОценок пока нет
- Tabla Comparativa: Flip Flop VS LatchДокумент2 страницыTabla Comparativa: Flip Flop VS LatchNoé Beltrán100% (2)
- Funcionamiento de flip-flops y registros digitalesДокумент11 страницFuncionamiento de flip-flops y registros digitalesBilly Markos Felix GutierrezОценок пока нет
- Programación HíbridaДокумент4 страницыProgramación HíbridalupithavazquezОценок пока нет
- Ensamblador lenguaje máquina examen 40Документ5 страницEnsamblador lenguaje máquina examen 40Zeus ScreenОценок пока нет
- Circuito Integrado 74LS181 (ALU)Документ3 страницыCircuito Integrado 74LS181 (ALU)Luis B HernandezОценок пока нет
- Trabajo Sumador Restador 3 BitsДокумент7 страницTrabajo Sumador Restador 3 BitsPandaОценок пока нет
- Sistemas Basados en MicroprocesadoresДокумент16 страницSistemas Basados en MicroprocesadoresHector InbacuanОценок пока нет
- Operación General de La MemoriaДокумент2 страницыOperación General de La MemoriaRafael Ramos100% (2)
- Diseño e Implementacion de Memorias Ram y Rom en VHDLДокумент7 страницDiseño e Implementacion de Memorias Ram y Rom en VHDLCarlos Eduardo GarciaОценок пока нет
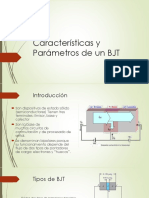
- BJT CaracterísticasДокумент9 страницBJT CaracterísticasSergio Adán0% (1)
- Qué Es Un Ciclo FetchДокумент2 страницыQué Es Un Ciclo FetchFlavio Salgado100% (1)
- Diferencias Entre Circuitos Combinacionales y SecuencialesДокумент1 страницаDiferencias Entre Circuitos Combinacionales y Secuencialesmanuelr95Оценок пока нет
- Informe Diseño de La Alu 4 BitsДокумент13 страницInforme Diseño de La Alu 4 BitsCarlopio Albert Gordon100% (4)
- Contadores Asincrono-SincronoДокумент20 страницContadores Asincrono-SincronoAngel OrtizОценок пока нет
- Examen PrincipalasdДокумент10 страницExamen PrincipalasdJosé Ignacio GunshaОценок пока нет
- Informe Flip/Flop 7473Документ13 страницInforme Flip/Flop 7473Ignacio Vera75% (4)
- Microprocesadores de 8 BitsДокумент11 страницMicroprocesadores de 8 BitsMilenka León Chavez100% (1)
- Retardos PIC en MPLABДокумент12 страницRetardos PIC en MPLABscorpio19Оценок пока нет
- Definicion de Memoria DigitalДокумент8 страницDefinicion de Memoria DigitalChristian Aron Iglesias Chingal100% (1)
- Ejercicios Pilas y Colas en JavaДокумент8 страницEjercicios Pilas y Colas en JavaShirly Jaimes50% (2)
- Guía de ejercicios sobre amplificadores operacionales (AOДокумент5 страницGuía de ejercicios sobre amplificadores operacionales (AOClaudio Andres Ramirez Mena0% (2)
- Flip - FlopДокумент17 страницFlip - FlopAna Laura Rios Cayoja100% (1)
- Operaciones Aritméticas y Lógicas en MicroprocesadoresДокумент12 страницOperaciones Aritméticas y Lógicas en MicroprocesadoresMARÍA HERNÁNDEZ40% (5)
- Características Relevantes de Los PICДокумент16 страницCaracterísticas Relevantes de Los PICDennis DiazОценок пока нет
- Aplicaciones Flip Flop Tipo DДокумент8 страницAplicaciones Flip Flop Tipo DLaddy Martha Rojas Román50% (2)
- Evolución Histórica de Los Sistemas de Comunicación de DatosДокумент3 страницыEvolución Histórica de Los Sistemas de Comunicación de DatosCristian ZambranoОценок пока нет
- Comunicación Serie: Módulo SSP-Interface I2CДокумент48 страницComunicación Serie: Módulo SSP-Interface I2Cantolaura100% (1)
- Sumador y restador de 4 bitsДокумент20 страницSumador y restador de 4 bitsdanielpro0% (1)
- Sistemas Con y Sin MemoriaДокумент4 страницыSistemas Con y Sin MemoriaJose Gregorio HerreraОценок пока нет
- Contador Binario 74194Документ3 страницыContador Binario 74194Selene Ramirez CoronaОценок пока нет
- El Transistor Es Un Dispositivo Semiconductor de Tres CapasДокумент5 страницEl Transistor Es Un Dispositivo Semiconductor de Tres Capascalambres17Оценок пока нет
- Registros de Funciones EspecialesДокумент6 страницRegistros de Funciones EspecialesManuel Beltran NoguesОценок пока нет
- DIAC: Dispositivo semiconductor bidireccionalДокумент9 страницDIAC: Dispositivo semiconductor bidireccionalErack Suizo100% (1)
- Como Se Define Un FlipДокумент13 страницComo Se Define Un FlipRodolfo Israel Sandoval TalaveraОценок пока нет
- Estandares WANДокумент16 страницEstandares WANRosita Lizbeth Soto S100% (1)
- Máquinas de Estado AlgorítmicasДокумент30 страницMáquinas de Estado Algorítmicasafgr1990100% (2)
- Preguntas MicroДокумент8 страницPreguntas MicrowilfredoОценок пока нет
- DIAGRAMADECONEXIONDEL8086Документ6 страницDIAGRAMADECONEXIONDEL8086limbertОценок пока нет
- El Microprocesador 8086Документ5 страницEl Microprocesador 8086Fabrizio PortilloОценок пока нет
- El Microprocesador 8085Документ11 страницEl Microprocesador 8085neptuno97Оценок пока нет
- Administración de InventariosДокумент16 страницAdministración de InventariosPeter VeletzuyОценок пока нет
- Lista de Frutas Con Sus BeneficiosДокумент8 страницLista de Frutas Con Sus BeneficiosPeter VeletzuyОценок пока нет
- GuatemalaДокумент1 страницаGuatemalaPeter VeletzuyОценок пока нет
- PingüinoДокумент4 страницыPingüinoPeter VeletzuyОценок пока нет
- Palabras CompuestasДокумент3 страницыPalabras CompuestasPeter VeletzuyОценок пока нет
- Barrió Loma Linda HuitanДокумент1 страницаBarrió Loma Linda HuitanPeter VeletzuyОценок пока нет
- Rifamos Bonitos PremiosДокумент2 страницыRifamos Bonitos PremiosPeter VeletzuyОценок пока нет
- Hernia InguinalДокумент7 страницHernia InguinalPeter VeletzuyОценок пока нет
- Nuevo MesquinolДокумент2 страницыNuevo MesquinolPeter VeletzuyОценок пока нет
- 1 de Enero Año NuevoДокумент1 страница1 de Enero Año NuevoPeter VeletzuyОценок пока нет
- GenomaДокумент9 страницGenomaPeter VeletzuyОценок пока нет
- 6 Canciones Guatemaltecas Imagenes GrandesДокумент12 страниц6 Canciones Guatemaltecas Imagenes GrandesPeter VeletzuyОценок пока нет
- INTRODUCCIÓNДокумент7 страницINTRODUCCIÓNPeter VeletzuyОценок пока нет
- TemaДокумент3 страницыTemaPeter VeletzuyОценок пока нет
- MasaДокумент3 страницыMasaPeter VeletzuyОценок пока нет
- ContratoДокумент2 страницыContratoPeter VeletzuyОценок пока нет
- Listado CanalesДокумент2 страницыListado CanalesPeter VeletzuyОценок пока нет
- Artes PlásticasДокумент3 страницыArtes PlásticasPeter VeletzuyОценок пока нет
- AntropologíaДокумент32 страницыAntropologíaPeter VeletzuyОценок пока нет
- Cien PoemasДокумент10 страницCien PoemasPeter VeletzuyОценок пока нет
- Artículo 591Документ3 страницыArtículo 591Peter VeletzuyОценок пока нет
- Bienvenidos Con Tu Sonrisa Ases Al Mundo Más Bello. "Документ2 страницыBienvenidos Con Tu Sonrisa Ases Al Mundo Más Bello. "Peter VeletzuyОценок пока нет
- Imagenes SistemasДокумент5 страницImagenes SistemasPeter VeletzuyОценок пока нет
- Historia de La QuДокумент1 страницаHistoria de La QuPeter VeletzuyОценок пока нет
- Inventos TecnologicosДокумент3 страницыInventos TecnologicosPeter VeletzuyОценок пока нет
- Neuro MarketingДокумент3 страницыNeuro MarketingPeter VeletzuyОценок пока нет
- Vincent Van GoghДокумент7 страницVincent Van GoghPeter VeletzuyОценок пока нет
- Lenguaje convencional vs no convencional: diferenciasДокумент1 страницаLenguaje convencional vs no convencional: diferenciasPeter VeletzuyОценок пока нет
- Pasivo CorrienteДокумент9 страницPasivo CorrientePeter VeletzuyОценок пока нет
- Quetzaltenango 15 de Febrero de 2014Документ3 страницыQuetzaltenango 15 de Febrero de 2014Peter VeletzuyОценок пока нет
- SO - Anderson ManosalvasДокумент32 страницыSO - Anderson ManosalvasandersonОценок пока нет
- MISION Pet Food DispenserДокумент5 страницMISION Pet Food DispenserLINA MARIA HUANG TRIVIÑOОценок пока нет
- Mifi ZTE PDFДокумент2 страницыMifi ZTE PDFAlexander SuarezОценок пока нет
- Programación ConcurrenteДокумент5 страницProgramación ConcurrenteLusdielkaОценок пока нет
- ProcessHistorianPRHIesES Es ESДокумент44 страницыProcessHistorianPRHIesES Es ESMarlomОценок пока нет
- Diseño de Sistemas Interactivos Centrados en El Us... - (PG 140 - 167)Документ28 страницDiseño de Sistemas Interactivos Centrados en El Us... - (PG 140 - 167)Alexis Zorrilla RuizОценок пока нет
- Presentacion de Redes de ComputadoraДокумент36 страницPresentacion de Redes de ComputadoraSandra Herrera Gonzalez100% (1)
- Caso de Estudion MEC II TrimestrenДокумент6 страницCaso de Estudion MEC II TrimestrenD'eiviid K'iingОценок пока нет
- Tarea 2 Capitulo 2 Administracion Moderna 2Документ10 страницTarea 2 Capitulo 2 Administracion Moderna 2jose alberto garcia lemusОценок пока нет
- Cuadro Sinoptico Clasificacion Del SoftwareДокумент2 страницыCuadro Sinoptico Clasificacion Del SoftwareJacinto De Jesús100% (1)
- CORPOSALUD GLOSARIO TICS SALUDДокумент13 страницCORPOSALUD GLOSARIO TICS SALUDleonardo75% (12)
- Tarea 7 Analisis y Diseno de SistemasДокумент7 страницTarea 7 Analisis y Diseno de SistemasLuis Sánchez Elizalde100% (1)
- Plan de Capacitación Técnico en La Instalación y Reparación de Equipo de CómputoДокумент2 страницыPlan de Capacitación Técnico en La Instalación y Reparación de Equipo de CómputoAlberto AlanizОценок пока нет
- Informática I 2020-2Документ160 страницInformática I 2020-2Chepillo Ollipech100% (1)
- Linux Primeros PasosДокумент16 страницLinux Primeros PasosPablo David MoyaОценок пока нет
- HP Proactive Care Service Datasheet EspanolДокумент19 страницHP Proactive Care Service Datasheet EspanolSergio Fernando Ibañez SanchezОценок пока нет
- Instalación de Sistema Operativos y Programas UtilitariosДокумент4 страницыInstalación de Sistema Operativos y Programas UtilitariosFélix DurangoОценок пока нет
- Instalación Del JDKДокумент6 страницInstalación Del JDKpruebapruebapruebaОценок пока нет
- SO Parcial Ingeniería SistemasДокумент16 страницSO Parcial Ingeniería SistemasSmith JimenezОценок пока нет
- Aplicacioes OfimáticasДокумент14 страницAplicacioes OfimáticasRENAN GONÇALVES IBAÑEZОценок пока нет
- Uso y Manejo de Los Atajos Del TecladoДокумент15 страницUso y Manejo de Los Atajos Del TecladogaryОценок пока нет
- Tipos de KernelДокумент1 страницаTipos de KernelFelix GarcíaОценок пока нет
- ANEXO VI - Características de La Prueba PrácticaДокумент8 страницANEXO VI - Características de La Prueba PrácticaAlbaОценок пока нет
- Esquema básico software 40cДокумент2 страницыEsquema básico software 40cCiber pedro c coloradoОценок пока нет
- Unidad 5. Gerencia Del Area de Equipos y TecnologiaДокумент9 страницUnidad 5. Gerencia Del Area de Equipos y TecnologiaJosé Francisco Q100% (1)
- Metodo de Distribucion de CargaДокумент69 страницMetodo de Distribucion de Cargaeduardo100% (1)
- Arquitectura de Computadoras - Programacion-EnsambladorДокумент125 страницArquitectura de Computadoras - Programacion-EnsambladorYosbel Jemi Reyes RojasОценок пока нет
- Reporte de Sistemas Operativos Por SaavedraДокумент4 страницыReporte de Sistemas Operativos Por SaavedraSawyper Dragon100% (1)
- 2021 601 Inf Act 2 Funciones y Tipos de SoДокумент5 страниц2021 601 Inf Act 2 Funciones y Tipos de SoAndres Rayo Rayo CaballoОценок пока нет
- Contenidos Arquitectura PC IIДокумент3 страницыContenidos Arquitectura PC IIedgar cisnerosОценок пока нет