Вам также может понравиться
- Estimating Long Run Effects in Models With Cross-Sectional Dependence Using Xtdcce2Документ37 страницEstimating Long Run Effects in Models With Cross-Sectional Dependence Using Xtdcce2fbn2377Оценок пока нет
- Power Geometry in Algebraic and Differential EquationsОт EverandPower Geometry in Algebraic and Differential EquationsОценок пока нет
- On Asymptotic Distribution Theory in Segmented Regression ProblemsДокумент36 страницOn Asymptotic Distribution Theory in Segmented Regression Problemscratto6384Оценок пока нет
- Tugas BiostatДокумент24 страницыTugas BiostatOla MjnОценок пока нет
- Ordered Response ModelsДокумент15 страницOrdered Response ModelsSuvamОценок пока нет
- Second-Order Nonlinear Least Squares Estimation: Liqun WangДокумент18 страницSecond-Order Nonlinear Least Squares Estimation: Liqun WangJyoti GargОценок пока нет
- GLM, GAMs & GLLMs - An Overview of Theory For Applications in Fisheries Research, VENABLES, 2004Документ19 страницGLM, GAMs & GLLMs - An Overview of Theory For Applications in Fisheries Research, VENABLES, 2004Igor MonteiroОценок пока нет
- Rate of Convergence To An Asymptotic Profile For The Self-Similar Fragmentation and Growth-Fragmentation EquationsДокумент36 страницRate of Convergence To An Asymptotic Profile For The Self-Similar Fragmentation and Growth-Fragmentation EquationsAndres GuevaraОценок пока нет
- Balazsi-Matyas: The Estimation of Multi-Dimensional FixedEffects Panel Data ModelsДокумент38 страницBalazsi-Matyas: The Estimation of Multi-Dimensional FixedEffects Panel Data Modelsrapporter.netОценок пока нет
- WooldridgeДокумент57 страницWooldridgeamudaryo0% (1)
- Ruhr-Universit at Bochum: 1998, Vol. 26, No. 2, 778-800Документ23 страницыRuhr-Universit at Bochum: 1998, Vol. 26, No. 2, 778-800Yam CrackerОценок пока нет
- Forrester 1982: 405 978-1-4244-9864-2/10/$26.00 ©2010 IEEEДокумент12 страницForrester 1982: 405 978-1-4244-9864-2/10/$26.00 ©2010 IEEEalvamu3354Оценок пока нет
- Generalised Coupled Tensor Factorisation: Taylan - Cemgil, Umut - Simsekli @boun - Edu.trДокумент9 страницGeneralised Coupled Tensor Factorisation: Taylan - Cemgil, Umut - Simsekli @boun - Edu.trxmercanОценок пока нет
- The Annals of Applied Probability 10.1214/10-AAP698 Institute of Mathematical StatisticsДокумент20 страницThe Annals of Applied Probability 10.1214/10-AAP698 Institute of Mathematical StatisticsThu NguyenОценок пока нет
- Maximum Likelihood Estimation of Limited and Discrete Dependent Variable Models With Nested Random EffectsДокумент23 страницыMaximum Likelihood Estimation of Limited and Discrete Dependent Variable Models With Nested Random EffectsJaime NavarroОценок пока нет
- 09 Aos687Документ31 страница09 Aos687Anirban NathОценок пока нет
- NLP ProblemsДокумент26 страницNLP ProblemsTianyu TaoОценок пока нет
- Statistical ModelДокумент9 страницStatistical ModelRae SecretariaОценок пока нет
- SCH Luc HterДокумент21 страницаSCH Luc HterlindaОценок пока нет
- Specification Testing of Discrete Choice Models: A Note On The Use of A Nonparametric TestДокумент14 страницSpecification Testing of Discrete Choice Models: A Note On The Use of A Nonparametric TestAkram ElsaiedОценок пока нет
- Divide and Conquer Kernel Ridge Regression: University of California, Berkeley University of California, BerkeleyДокумент26 страницDivide and Conquer Kernel Ridge Regression: University of California, Berkeley University of California, BerkeleyTiberiu TincaОценок пока нет
- 1 Projection Pursuit Regression and Neural Networks 6Документ44 страницы1 Projection Pursuit Regression and Neural Networks 6sridharmirОценок пока нет
- Breaking The Curse of Dimensionality With Convex Neural NetworksДокумент53 страницыBreaking The Curse of Dimensionality With Convex Neural NetworksJonny BidonОценок пока нет
- Particle Filter TutorialДокумент39 страницParticle Filter TutorialJen RundsОценок пока нет
- On The Singular Values of The Hankel Matrix With Application in Singular Spectrum AnalysisДокумент15 страницOn The Singular Values of The Hankel Matrix With Application in Singular Spectrum AnalysisHumbang PurbaОценок пока нет
- Fuzzy Adaptive H Control For A Class of Nonlinear SystemsДокумент6 страницFuzzy Adaptive H Control For A Class of Nonlinear SystemsnguyenquangduocОценок пока нет
- Fractal Analysis and Tumor GrowthДокумент14 страницFractal Analysis and Tumor GrowthDidima ToalaОценок пока нет
- Ku Satsu 160225Документ11 страницKu Satsu 160225LameuneОценок пока нет
- Feasible Generalized Least Squares For Panel Data With Cross-Sectional and Serial CorrelationsДокумент18 страницFeasible Generalized Least Squares For Panel Data With Cross-Sectional and Serial CorrelationsAngel R ShereenОценок пока нет
- The Physical Meaning of Replica Symmetry BreakingДокумент15 страницThe Physical Meaning of Replica Symmetry BreakingpasomagaОценок пока нет
- Discontinuous GalerkinДокумент17 страницDiscontinuous GalerkinAnna ShcherbachevaОценок пока нет
- Order Reduction For Large Scale Finite Element Models: A Systems PerspectiveДокумент21 страницаOrder Reduction For Large Scale Finite Element Models: A Systems PerspectiveAnonymous lEBdswQXmxОценок пока нет
- Semi-Parametric Estimation of A Generalized Threshold Regression Model Under Conditional Quantile RestrictionДокумент28 страницSemi-Parametric Estimation of A Generalized Threshold Regression Model Under Conditional Quantile RestrictionDaniel Lee Eisenberg JacobsОценок пока нет
- Hybrid Systems - TutorialДокумент66 страницHybrid Systems - TutorialKarthik VazhuthiОценок пока нет
- An Adaptive High-Gain Observer For Nonlinear Systems: Nicolas Boizot, Eric Busvelle, Jean-Paul GauthierДокумент8 страницAn Adaptive High-Gain Observer For Nonlinear Systems: Nicolas Boizot, Eric Busvelle, Jean-Paul Gauthiertidjani73Оценок пока нет
- Using Dynamic Programming With Adaptive Grid Schemes For Optimal Control Problems in EconomicsДокумент30 страницUsing Dynamic Programming With Adaptive Grid Schemes For Optimal Control Problems in EconomicseeeeewwwwwwwwsssssssssОценок пока нет
- Restrepo 2006 Emergence 2Документ9 страницRestrepo 2006 Emergence 2pastafarianboyОценок пока нет
- Helicopter Dynamics-10Документ14 страницHelicopter Dynamics-10KaradiasОценок пока нет
- Q.1 Explain The Underlying Ideas Behind The Log It Model. Explain On What Grounds Log It Model Is An Improvement Over Linear Probability Model. AnsДокумент17 страницQ.1 Explain The Underlying Ideas Behind The Log It Model. Explain On What Grounds Log It Model Is An Improvement Over Linear Probability Model. AnsBinyamin AlamОценок пока нет
- Functional Models For Regression Tree Leaves: Luís TorgoДокумент9 страницFunctional Models For Regression Tree Leaves: Luís TorgoLoh Jia SinОценок пока нет
- Dyncomp PreprintДокумент9 страницDyncomp PreprintAmalina SulaimanОценок пока нет
- Some Guidelines and Guarantees For Common Random NumbersДокумент25 страницSome Guidelines and Guarantees For Common Random NumbersAditya TОценок пока нет
- Within-And Between-Cluster Effects in Generalized Linear Mixed Models: A Discussion of Approaches and The Xthybrid CommandДокумент27 страницWithin-And Between-Cluster Effects in Generalized Linear Mixed Models: A Discussion of Approaches and The Xthybrid CommandChakale1Оценок пока нет
- Cluster and Stratified Sampling: 1. The Linear Model With Cluster EffectsДокумент31 страницаCluster and Stratified Sampling: 1. The Linear Model With Cluster Effectsnono85Оценок пока нет
- Consensus Analysis ZDH ZHBДокумент28 страницConsensus Analysis ZDH ZHBTua TambaОценок пока нет
- Marginal Effects For Generalized Linear Models: The MFX Package For RДокумент15 страницMarginal Effects For Generalized Linear Models: The MFX Package For Rcamus CaОценок пока нет
- Applied Mathematical Modelling: M. Hadizadeh, S. YazdaniДокумент9 страницApplied Mathematical Modelling: M. Hadizadeh, S. YazdaniHo Nhat NamОценок пока нет
- Graduate School of Education University of California Los Angeles, CaliforniaДокумент18 страницGraduate School of Education University of California Los Angeles, CaliforniaJoão MarôcoОценок пока нет
- Discret HamzaouiДокумент19 страницDiscret HamzaouiPRED ROOMОценок пока нет
- Papke Wooldridge 1996Документ15 страницPapke Wooldridge 1996fictitious758Оценок пока нет
- Qu ZhongjunДокумент41 страницаQu ZhongjunjuanivazquezОценок пока нет
- Tibs Jrssb96Документ23 страницыTibs Jrssb96sunbenОценок пока нет
- Regression Shrinkage and Selection Via The LassoДокумент22 страницыRegression Shrinkage and Selection Via The LassopedropietrafesaОценок пока нет
- Nataf ModelДокумент8 страницNataf ModelLaura ManolacheОценок пока нет
- Quantile Regression in Varying Coefficient Model of Upper Respiratory Tract Infections in Bandung CityДокумент9 страницQuantile Regression in Varying Coefficient Model of Upper Respiratory Tract Infections in Bandung Cityjack.torrance.kingОценок пока нет
- Amir Jstat 2020Документ19 страницAmir Jstat 2020Damm TechyОценок пока нет
- Engle 1982Документ22 страницыEngle 1982elvisgonzalesarceОценок пока нет
- Pnas PDFДокумент5 страницPnas PDFpablo jensenОценок пока нет
- Chapter 19 LInear Programming PDFДокумент95 страницChapter 19 LInear Programming PDFMohammad Akib NawazОценок пока нет
- Thesis Sales ForcastingДокумент43 страницыThesis Sales ForcastingHainsley EdwardsОценок пока нет
- Evidence-Based Sports Medicine To Prevent Knee Joint Injury in Triple JumpДокумент4 страницыEvidence-Based Sports Medicine To Prevent Knee Joint Injury in Triple JumpValeska PalapeОценок пока нет
- Recognition of Vehicle Number Plate Using Matlab: AbstractДокумент4 страницыRecognition of Vehicle Number Plate Using Matlab: Abstractkalyan chakravarthyОценок пока нет
- Introduction To The Course: CH2303 Chemical Engineering Thermodynamics IДокумент11 страницIntroduction To The Course: CH2303 Chemical Engineering Thermodynamics IB.md. Thoufik1232Оценок пока нет
- Generalized Linear ModelДокумент67 страницGeneralized Linear Modelshanthikk3Оценок пока нет
- Pattern RecognitionДокумент3 страницыPattern RecognitionANiketОценок пока нет
- Single Feedback Control LoopДокумент1 страницаSingle Feedback Control LoopMichel Sánchez ColinОценок пока нет
- PythonДокумент22 страницыPythonandiksribdОценок пока нет
- Input-Output Analysis.: Exercises in MathematicsДокумент2 страницыInput-Output Analysis.: Exercises in MathematicsTedОценок пока нет
- Graphs LectureДокумент23 страницыGraphs LectureReina Chiara Garcia MagcamitОценок пока нет
- Downcoiler Surface Fault Prediction For A Hot Strip Steel MillДокумент16 страницDowncoiler Surface Fault Prediction For A Hot Strip Steel MillruggeroОценок пока нет
- 329 Lect 07Документ10 страниц329 Lect 07des tosОценок пока нет
- Unit 1 Introduction of Machine Learning NotesДокумент57 страницUnit 1 Introduction of Machine Learning NotesB 14 Tejas NunОценок пока нет
- Machine LearningДокумент7 страницMachine LearningJesna SОценок пока нет
- CD Mini ProjectДокумент4 страницыCD Mini ProjectG MeghanaОценок пока нет
- B.A. (Prog.) Mathematics 6th Semeester-2023Документ8 страницB.A. (Prog.) Mathematics 6th Semeester-2023guptaaamit30Оценок пока нет
- Third NoДокумент6 страницThird Nofikadu walkaОценок пока нет
- ChainerДокумент3 страницыChainerava939Оценок пока нет
- Weighted Graphs: - Shortest PathsДокумент7 страницWeighted Graphs: - Shortest PathsSyed MobashirОценок пока нет
- Passgan: A Deep Learning Approach For Password GuessingДокумент20 страницPassgan: A Deep Learning Approach For Password GuessingPsych MenОценок пока нет
- Solu of Assignment 7Документ4 страницыSolu of Assignment 7dontstopmeОценок пока нет
- Mathematical Test SampleДокумент12 страницMathematical Test SamplegregoryОценок пока нет
- 2.2 Location Breakeven AnalysisДокумент3 страницы2.2 Location Breakeven Analysisorenchladee100% (1)
- 231CCS-4 Lab ManualДокумент33 страницы231CCS-4 Lab ManualHaronameryОценок пока нет
- Microsoft Malware PredictionДокумент16 страницMicrosoft Malware Predictionvikram k100% (1)
- Solving Exponential EquationsДокумент9 страницSolving Exponential EquationsJunrie Mark SumalpongОценок пока нет
- Risky Bonds and CDS Valuation in PythonДокумент10 страницRisky Bonds and CDS Valuation in Pythontheodor_munteanuОценок пока нет
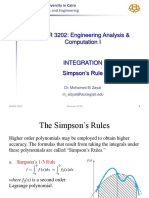
- Integration - Simpson's Rule PDFДокумент17 страницIntegration - Simpson's Rule PDFmmmbОценок пока нет
- Differential Geometry and Mechanics Applications To Chaotic Dynamical SystemsДокумент24 страницыDifferential Geometry and Mechanics Applications To Chaotic Dynamical SystemsGINOUX Jean-MarcОценок пока нет
- How to Teach Nature Journaling: Curiosity, Wonder, AttentionОт EverandHow to Teach Nature Journaling: Curiosity, Wonder, AttentionРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Common Core Science 4 Today, Grade 3: Daily Skill PracticeОт EverandCommon Core Science 4 Today, Grade 3: Daily Skill PracticeРейтинг: 3.5 из 5 звезд3.5/5 (2)
- The School Garden Curriculum: An Integrated K-8 Guide for Discovering Science, Ecology, and Whole-Systems ThinkingОт EverandThe School Garden Curriculum: An Integrated K-8 Guide for Discovering Science, Ecology, and Whole-Systems ThinkingОценок пока нет
- A-Level Chemistry Revision: Cheeky Revision ShortcutsОт EverandA-Level Chemistry Revision: Cheeky Revision ShortcutsРейтинг: 4 из 5 звезд4/5 (5)
- Airplane Flying Handbook: FAA-H-8083-3C (2024)От EverandAirplane Flying Handbook: FAA-H-8083-3C (2024)Рейтинг: 4 из 5 звезд4/5 (12)
- AI and the Future of Education: Teaching in the Age of Artificial IntelligenceОт EverandAI and the Future of Education: Teaching in the Age of Artificial IntelligenceРейтинг: 5 из 5 звезд5/5 (1)
- A-level Biology Revision: Cheeky Revision ShortcutsОт EverandA-level Biology Revision: Cheeky Revision ShortcutsРейтинг: 5 из 5 звезд5/5 (5)
- GCSE Biology Revision: Cheeky Revision ShortcutsОт EverandGCSE Biology Revision: Cheeky Revision ShortcutsРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Stay Curious and Keep Exploring: 50 Amazing, Bubbly, and Creative Science Experiments to Do with the Whole FamilyОт EverandStay Curious and Keep Exploring: 50 Amazing, Bubbly, and Creative Science Experiments to Do with the Whole FamilyОценок пока нет
- What is the Scientific Method? Science Book for Kids | Children's Science BooksОт EverandWhat is the Scientific Method? Science Book for Kids | Children's Science BooksРейтинг: 5 из 5 звезд5/5 (1)
- How to Think Like a Lawyer--and Why: A Common-Sense Guide to Everyday DilemmasОт EverandHow to Think Like a Lawyer--and Why: A Common-Sense Guide to Everyday DilemmasРейтинг: 3 из 5 звезд3/5 (1)
- Chemistry All-in-One For Dummies (+ Chapter Quizzes Online)От EverandChemistry All-in-One For Dummies (+ Chapter Quizzes Online)Оценок пока нет
- RASPBERRY PI FOR BEGINNERS: TIPS AND TRICKS TO LEARN RASPBERRY PI PROGRAMMINGОт EverandRASPBERRY PI FOR BEGINNERS: TIPS AND TRICKS TO LEARN RASPBERRY PI PROGRAMMINGОценок пока нет
- Quantum Physics for Beginners: Simple Illustrated Guide to Discover with Practical Explanations the Paradoxes of the Life and Universe Reconsidering RealityОт EverandQuantum Physics for Beginners: Simple Illustrated Guide to Discover with Practical Explanations the Paradoxes of the Life and Universe Reconsidering RealityРейтинг: 2 из 5 звезд2/5 (1)