Вам также может понравиться
- Utilisations Du TransistorДокумент7 страницUtilisations Du TransistorPatrick Benie100% (1)
- TP Electronique - Ampli Op - Suiveur PDFДокумент1 страницаTP Electronique - Ampli Op - Suiveur PDFPatrick BenieОценок пока нет
- Plaquette Ge France Maj PDFДокумент19 страницPlaquette Ge France Maj PDFPatrick BenieОценок пока нет
- Les Technique de SurveillanceДокумент3 страницыLes Technique de SurveillanceZGBMRDОценок пока нет
- TP5 Hacheur Serie Moteur Courant ContinuДокумент9 страницTP5 Hacheur Serie Moteur Courant ContinuNoureddine Ould Cherchali0% (1)
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 2971F68Ed01 PDFДокумент6 страниц2971F68Ed01 PDFPatrick BenieОценок пока нет
- Mesure Vibratoire en Niveau Global PDFДокумент7 страницMesure Vibratoire en Niveau Global PDFPatrick BenieОценок пока нет
- MAHLE - Filtre EndommagéДокумент76 страницMAHLE - Filtre EndommagékmelyahayОценок пока нет
- Table Des Matieres PDFДокумент6 страницTable Des Matieres PDFPatrick BenieОценок пока нет
- Analyse SpectraleДокумент6 страницAnalyse SpectralemoipopОценок пока нет
- Le Controle Ultrasonore PDFДокумент7 страницLe Controle Ultrasonore PDFPatrick BenieОценок пока нет
- Cours TaДокумент25 страницCours TaKara Reda100% (1)
- TP1 Redressement Monophase Non Commande PDFДокумент7 страницTP1 Redressement Monophase Non Commande PDFPatrick Benie63% (8)
- TP3 Variation Vitesse Moteur Courant Continu Redressement PD2 PDFДокумент7 страницTP3 Variation Vitesse Moteur Courant Continu Redressement PD2 PDFPatrick BenieОценок пока нет
- Cours Hacheurs PDFДокумент9 страницCours Hacheurs PDFFarid AfifiОценок пока нет
- TP2 Redressement Monophase CommandeДокумент8 страницTP2 Redressement Monophase Commandepopamino80% (5)
- TP3 Etude Des Capteurs de ProximiteДокумент7 страницTP3 Etude Des Capteurs de Proximitejameswest_pistolerosОценок пока нет
- Cours TransformateurДокумент18 страницCours TransformateurairkadОценок пока нет
- TP1 Etude Des Capteurs de Force PDFДокумент7 страницTP1 Etude Des Capteurs de Force PDFPatrick Benie50% (2)
- CAR Pinces Et Capteurs Courant Original FRДокумент9 страницCAR Pinces Et Capteurs Courant Original FREdidjo DarwinОценок пока нет
- TP2 Etude Des Capteurs de Distance Et de Deplacement PDFДокумент3 страницыTP2 Etude Des Capteurs de Distance Et de Deplacement PDFPatrick BenieОценок пока нет
- Cours TransformateurДокумент18 страницCours TransformateurairkadОценок пока нет
- Cours Machines Alternatives PDFДокумент11 страницCours Machines Alternatives PDFPatrick BenieОценок пока нет
- Cours TriphaseДокумент16 страницCours TriphasekamalОценок пока нет
- Cours FFT!!!!!!!!Документ9 страницCours FFT!!!!!!!!tichatataОценок пока нет
- Cours TriphaseДокумент16 страницCours TriphasekamalОценок пока нет
- Cours Conversion EnergieДокумент7 страницCours Conversion Energieselotmani100% (2)
- B3 221 FR en PDFДокумент8 страницB3 221 FR en PDFPatrick BenieОценок пока нет
- Merged 20200609 172757.TextMarkДокумент6 страницMerged 20200609 172757.TextMarkAngeauden DidoОценок пока нет
- Travaux Dirigés - Série 1Документ2 страницыTravaux Dirigés - Série 1MOHAND ES - SAADANYОценок пока нет
- Respect Des Règles de Stockage 1Документ7 страницRespect Des Règles de Stockage 1Junior DossoОценок пока нет
- Vincent Lorphelin - La République Des EntrepreneursДокумент56 страницVincent Lorphelin - La République Des EntrepreneursFondapolОценок пока нет
- Cahier Sommet Corrigé ch4Документ6 страницCahier Sommet Corrigé ch4Yuxiang YuanОценок пока нет
- Pratique de L'entretienДокумент22 страницыPratique de L'entretienDhia Eddine AbedОценок пока нет
- Comparatif Et Configuration HSRP, VRRP, GLBP - Blog Sur Les Technologies RésДокумент9 страницComparatif Et Configuration HSRP, VRRP, GLBP - Blog Sur Les Technologies RésslimanovОценок пока нет
- L2 Lac Ana NumДокумент7 страницL2 Lac Ana NumReyririОценок пока нет
- Fibre OptiqueДокумент100 страницFibre OptiqueAbdelilah AchouriОценок пока нет
- Afficheurs Série 700Документ10 страницAfficheurs Série 700tlevageОценок пока нет
- Compte-Rendu 2 POOДокумент3 страницыCompte-Rendu 2 POOAbdelbaki MissaouiОценок пока нет
- RÉDACTION Niveau 6è Année Ou CM2Документ17 страницRÉDACTION Niveau 6è Année Ou CM2Sangaré Hamadou100% (4)
- Processus Recrutement.2 PDFДокумент3 страницыProcessus Recrutement.2 PDFAna RotaruОценок пока нет
- PFE - Corrigé Jusqu'a La Page 21 - 121427Документ64 страницыPFE - Corrigé Jusqu'a La Page 21 - 121427Youness HriouichОценок пока нет
- GCPaout19 SommaireДокумент13 страницGCPaout19 Sommairelouveau.antoineОценок пока нет
- Notes de Cours - Circuits Logiques CombinatoiresДокумент34 страницыNotes de Cours - Circuits Logiques CombinatoiresAbdellah id ben omarОценок пока нет
- Theorie de LarchitectureДокумент11 страницTheorie de LarchitecturemohammedОценок пока нет
- Quels Sont Les Différents Acteurs Intervenants en Milieu Pénitentiaire - VieДокумент2 страницыQuels Sont Les Différents Acteurs Intervenants en Milieu Pénitentiaire - VieAmane ImaneОценок пока нет
- L Orthographe Du PulaarДокумент6 страницL Orthographe Du PulaarBah AbrahamОценок пока нет
- Commence Ici: Guide en Bref: Détails Sur Les Piles: +: On DanseДокумент1 страницаCommence Ici: Guide en Bref: Détails Sur Les Piles: +: On DansephigeramОценок пока нет
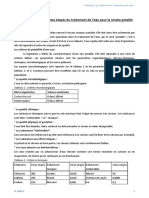
- Chapitre 5 - Le Traitement Et L'épuration Des EauxДокумент5 страницChapitre 5 - Le Traitement Et L'épuration Des Eauxرضا بونعاسОценок пока нет
- BiophysiqДокумент69 страницBiophysiqyouness.khalfaouiОценок пока нет
- RSE-Concepts de Base - QCMДокумент3 страницыRSE-Concepts de Base - QCMlahoucine.ihander0% (1)
- Guide ORIAS Conformité Modalites de Contact VFДокумент8 страницGuide ORIAS Conformité Modalites de Contact VFBenjamin ChabrierОценок пока нет
- Chapitre 1 Normalisation Reperage Installation Electrique PDFДокумент23 страницыChapitre 1 Normalisation Reperage Installation Electrique PDFstoufa73Оценок пока нет
- Cheville TapconДокумент5 страницCheville TapconAnonymous FBFoaVMuОценок пока нет
- 9 GuebayaДокумент10 страниц9 GuebayaYassine RabhiОценок пока нет
- 2022mulh5427 These ColardДокумент190 страниц2022mulh5427 These ColardReda AveОценок пока нет
- Ite Missa Est, Op6-FS, VS, PX-PML PDFДокумент28 страницIte Missa Est, Op6-FS, VS, PX-PML PDFbry kaligayahanОценок пока нет
- BenhrimidaДокумент14 страницBenhrimidamarlos costaОценок пока нет