Вам также может понравиться
- Norma Electrica4 2003Документ175 страницNorma Electrica4 2003jermainlp100% (4)
- Manual técnico sobre conductores eléctricosДокумент50 страницManual técnico sobre conductores eléctricoslimaboxОценок пока нет
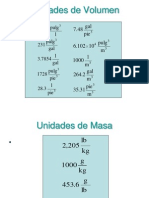
- UnidadesДокумент11 страницUnidadesPedro GomezОценок пока нет
- Info de Transductor 2Документ15 страницInfo de Transductor 2Pedro GomezОценок пока нет
- PirometroДокумент4 страницыPirometroPedro Gomez0% (1)
- Autosocorro Tecnicas Verticales PDFДокумент61 страницаAutosocorro Tecnicas Verticales PDFcentroelfoОценок пока нет
- Descontinuacion de ModelosДокумент2 страницыDescontinuacion de ModelosBeto FmJrОценок пока нет
- Perelman - Algebra RecreativaДокумент160 страницPerelman - Algebra Recreativachicho6404Оценок пока нет
- Hepatitis B: una revisión de la epidemiología, transmisión, diagnóstico y prevenciónДокумент33 страницыHepatitis B: una revisión de la epidemiología, transmisión, diagnóstico y prevenciónLetícia LimaОценок пока нет
- 2o Lista de Cotejo EvДокумент8 страниц2o Lista de Cotejo EvMiguel Ángel Rodriguez GuevaraОценок пока нет
- Muestreo y Analisis de DatosДокумент6 страницMuestreo y Analisis de DatosCruces OscarОценок пока нет
- SEMANA 4 - NIC 24 Información A Revelar Sobre Parte RelacionadaДокумент25 страницSEMANA 4 - NIC 24 Información A Revelar Sobre Parte RelacionadaJonatan RamosОценок пока нет
- Tarea 3Документ1 страницаTarea 3Jorge Hernández0% (1)
- Buenos Dias Mina Justa 2022.07.08Документ5 страницBuenos Dias Mina Justa 2022.07.08Eloy Ayna AduviriОценок пока нет
- Spirax Sarco - Guia Definitiva VaporДокумент7 страницSpirax Sarco - Guia Definitiva Vaporaxeluni_1205100% (1)
- Ficha Tecnica de DuchaДокумент3 страницыFicha Tecnica de DuchaAngaman Ventas SACОценок пока нет
- COAP3Документ32 страницыCOAP3ofg333Оценок пока нет
- Ficha de EcosistemasДокумент3 страницыFicha de EcosistemasVanesa Lin0% (1)
- Placenta PreviaДокумент70 страницPlacenta PreviaEstherОценок пока нет
- Practica 4 - Ind 3216Документ3 страницыPractica 4 - Ind 3216PedroEstebanQuisbertОценок пока нет
- Power Point Narrativa Pedagógica Práctica IIIДокумент15 страницPower Point Narrativa Pedagógica Práctica IIIMilagros LuceroОценок пока нет
- Autoridades responsables del proceso de contrataciónДокумент8 страницAutoridades responsables del proceso de contrataciónVicvicXGonzxОценок пока нет
- Manual de Uso: True-Rms Remote Display Digital MultimeterДокумент54 страницыManual de Uso: True-Rms Remote Display Digital MultimeterManuel FuentesОценок пока нет
- Orden de mérito estudiantes Ciencias de la ComunicaciónДокумент45 страницOrden de mérito estudiantes Ciencias de la Comunicaciónpamela0% (2)
- Cristalografía y MineralogíaДокумент24 страницыCristalografía y MineralogíaKevin ChavezОценок пока нет
- SRAMДокумент12 страницSRAMque buenoОценок пока нет
- EXPO Calidad Total, Circulos de Calidad y Just in Time (G3)Документ41 страницаEXPO Calidad Total, Circulos de Calidad y Just in Time (G3)Bo SamoОценок пока нет
- Cuestionario 4Документ1 страницаCuestionario 4Jose VargasОценок пока нет
- Rehabilitar La PreexistenciaДокумент8 страницRehabilitar La PreexistenciaIVANNA ARRIAGA DELGADOОценок пока нет
- Ejercicios de ProbabilidadesДокумент6 страницEjercicios de ProbabilidadesJulio César Paredes Quispe67% (3)
- PraziquantelДокумент3 страницыPraziquantelJimena HuayllaniОценок пока нет
- Contrato Privado de Promesa de Compra VentaДокумент3 страницыContrato Privado de Promesa de Compra VentaCae SarОценок пока нет
- Tesis Seguridad Privada 4973Документ33 страницыTesis Seguridad Privada 4973jvallejo810125Оценок пока нет
- 5 - Charm - Tracy Wolff (Google Trasnlate)Документ1 010 страниц5 - Charm - Tracy Wolff (Google Trasnlate)L O L A43% (7)
- Autoevaluación Probabilidad y EstadisticaДокумент4 страницыAutoevaluación Probabilidad y EstadisticaMОценок пока нет