Вам также может понравиться
- Guerrero (2015) - Diseño PTAPДокумент30 страницGuerrero (2015) - Diseño PTAPJose PerezОценок пока нет
- MVCT Resolución 330 de 2017 (Adopta El Reglamento Técnico para El Sector de Agua Potable y Saneamiento Básico, RAS)Документ40 страницMVCT Resolución 330 de 2017 (Adopta El Reglamento Técnico para El Sector de Agua Potable y Saneamiento Básico, RAS)Johan Leandro Agudelo GiraldoОценок пока нет
- Escuela Superior Politécnica de ChimborazoДокумент137 страницEscuela Superior Politécnica de ChimborazoSteven MancipeОценок пока нет
- 144297Документ102 страницы144297Steven MancipeОценок пока нет
- Tesis CoagulantesДокумент145 страницTesis CoagulantesJuanitaОценок пока нет
- 2 Floculador PDFДокумент3 страницы2 Floculador PDFruben colqueОценок пока нет
- 2019 2 IqДокумент138 страниц2019 2 IqSteven MancipeОценок пока нет
- Tesis CoagulantesДокумент145 страницTesis CoagulantesJuanitaОценок пока нет
- CuestionarioДокумент2 страницыCuestionarioSteven MancipeОценок пока нет
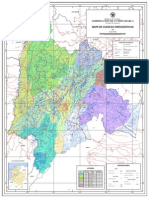
- Cundinamarca HidricoДокумент1 страницаCundinamarca HidricoEduardo Pinilla CastroОценок пока нет
- 144297Документ102 страницы144297Steven MancipeОценок пока нет
- Invitacion 1Документ1 страницаInvitacion 1Steven MancipeОценок пока нет
- Apoyo AA1Документ6 страницApoyo AA1Fabián Guillermo Reyes MartinezОценок пока нет
- Comercial IIДокумент13 страницComercial IISteven MancipeОценок пока нет
- 2.1. Politica de GreciaДокумент12 страниц2.1. Politica de GreciaSteven MancipeОценок пока нет
- Constantes dimensionales adimensionalesДокумент8 страницConstantes dimensionales adimensionalesSteven MancipeОценок пока нет
- 2do LABORATORIO VECTORESДокумент8 страниц2do LABORATORIO VECTORESSteven MancipeОценок пока нет
- Extracción de Acído Acético Del VinagreДокумент4 страницыExtracción de Acído Acético Del VinagreSteven MancipeОценок пока нет
- MAREA-corazón de MimbreДокумент3 страницыMAREA-corazón de MimbreubaldoОценок пока нет
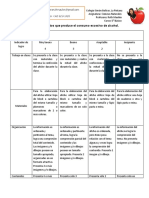
- 1 Afiche Efectos Del Alcohol 5° BásicoДокумент2 страницы1 Afiche Efectos Del Alcohol 5° BásicodanielaОценок пока нет
- Apunte LogaritmoДокумент2 страницыApunte LogaritmoJosé Alonso Astudillo HernandezОценок пока нет
- Ignacio de Catera y PadreДокумент42 страницыIgnacio de Catera y PadreCarlos Juarez SalazarОценок пока нет
- Tema 2 Introducción BT PDFДокумент67 страницTema 2 Introducción BT PDFAne Mi KosteñlОценок пока нет
- 03 Bioenergetica y TermodinámicaДокумент62 страницы03 Bioenergetica y TermodinámicaDaniel MedinaОценок пока нет
- Extraccion Liquido-Solido (Lixiviacion)Документ14 страницExtraccion Liquido-Solido (Lixiviacion)Jhon Francísco Hernández JiménezОценок пока нет
- Ejercicios MariajosefisicaДокумент7 страницEjercicios MariajosefisicaYaunes GaloisОценок пока нет
- TAREA ACADÉMICA 01 - Grupo 1Документ16 страницTAREA ACADÉMICA 01 - Grupo 1Sandra SembreraОценок пока нет
- Datos Climáticos y Meteorológicos Históricos Simulados para 16.86°N 99.82°O - MeteoblueДокумент1 страницаDatos Climáticos y Meteorológicos Históricos Simulados para 16.86°N 99.82°O - MeteoblueXimena RoqueОценок пока нет
- Msds Diluyente Poliuretano 55Документ4 страницыMsds Diluyente Poliuretano 55leslieОценок пока нет
- Niveles de Ansiedad en Estudiantes de Una Universidad Privada en La Ciudad de Trujillo2023Документ41 страницаNiveles de Ansiedad en Estudiantes de Una Universidad Privada en La Ciudad de Trujillo2023MARIA LICET LOPEZ LOPEZОценок пока нет
- Sesion LOS ECOSISTEMAS DEL PERÚДокумент4 страницыSesion LOS ECOSISTEMAS DEL PERÚVilma Gladis Rios HilarioОценок пока нет
- Carmona - Cómo Se Comenta Un Texto FílmicoДокумент71 страницаCarmona - Cómo Se Comenta Un Texto FílmicoJavier AguirreОценок пока нет
- TRAZOS DE CARRETERAS 1 TrabajoДокумент18 страницTRAZOS DE CARRETERAS 1 TrabajoCarlos Roder RamirezОценок пока нет
- Habilidades motricesДокумент3 страницыHabilidades motricesLuci FloresОценок пока нет
- Análisis comparativo de la variabilidad del índice COLCAP y las acciones de ArgosДокумент6 страницAnálisis comparativo de la variabilidad del índice COLCAP y las acciones de Argosyefferson muñozОценок пока нет
- Tema 2Документ25 страницTema 2estherОценок пока нет
- Actividad de Trabajo Autónomo en Línea - Attempt Review 2Документ6 страницActividad de Trabajo Autónomo en Línea - Attempt Review 2Gean Carlos Huaynates VargasОценок пока нет
- Responsabilidad de La DirecciónДокумент10 страницResponsabilidad de La DirecciónA.Оценок пока нет
- Guia Conversion Estados FinancierosДокумент5 страницGuia Conversion Estados FinancierosSergio SilvaОценок пока нет
- Fotointerpretación: Plan de vuelo fotogramétricoДокумент16 страницFotointerpretación: Plan de vuelo fotogramétricorononti2634Оценок пока нет
- Textiles InteligentesДокумент10 страницTextiles InteligentesMariel GonzálezОценок пока нет
- Variable Volume Pumping FundamentalsДокумент16 страницVariable Volume Pumping Fundamentalsadca100% (1)
- Trascripción Conversatorio "El Oficio Docente y La Escuela Por VenirДокумент18 страницTrascripción Conversatorio "El Oficio Docente y La Escuela Por VenirJurisPazzzОценок пока нет
- Reporte de Práctica No.1 PirolisisДокумент3 страницыReporte de Práctica No.1 PirolisisRodrigo ViguerasОценок пока нет
- AvionetaДокумент9 страницAvionetamaicol vente quintanaОценок пока нет
- Plan PtarДокумент27 страницPlan PtarAlexis Oswaldo Cuba BustamanteОценок пока нет
- Presentacion Clase II Esqueletica TTO Temprano IIIДокумент65 страницPresentacion Clase II Esqueletica TTO Temprano IIIDiana constanza Borrero zamudioОценок пока нет
- Cuestionario de Tabla PeriodicaДокумент11 страницCuestionario de Tabla PeriodicaWendy RodriguezОценок пока нет