Вам также может понравиться
- Maximum Principle PontreyaginДокумент143 страницыMaximum Principle PontreyaginSherif HelmyОценок пока нет
- Robust Control (/sliding Mode Controller) With An Application To Multi-Input Power System StabilisationДокумент9 страницRobust Control (/sliding Mode Controller) With An Application To Multi-Input Power System StabilisationSherif HelmyОценок пока нет
- Damping of Low Frequency Interarea Oscillations Using HVDC Modulation and SVC Voltage SupportДокумент16 страницDamping of Low Frequency Interarea Oscillations Using HVDC Modulation and SVC Voltage SupportSherif HelmyОценок пока нет
- Operational and Maintenance Instructions Manual For Medium and Low Voltage Power Control & DistributДокумент48 страницOperational and Maintenance Instructions Manual For Medium and Low Voltage Power Control & DistributSherif HelmyОценок пока нет
- MembershipДокумент11 страницMembershipSherif HelmyОценок пока нет
- Robust Damping of Multiple Swing Modes Employing Global Stabilizing Signals With A TCSCДокумент8 страницRobust Damping of Multiple Swing Modes Employing Global Stabilizing Signals With A TCSCSherif HelmyОценок пока нет
- Downtown Map of TorontoДокумент1 страницаDowntown Map of Torontomeesh6927341Оценок пока нет
- UofT 3D - MapДокумент1 страницаUofT 3D - MapSherif HelmyОценок пока нет
- PlepcxtteeeuДокумент20 страницPlepcxtteeeuManikannan.SОценок пока нет
- ICT 6641: Advanced Embedded System Lecture 2 Branch, Call and Delay Loops, AVR I/O port programmingДокумент23 страницыICT 6641: Advanced Embedded System Lecture 2 Branch, Call and Delay Loops, AVR I/O port programmingSherif HelmyОценок пока нет
- DETERMINING LOCATIONS FOR POWER SYSTEM STABILIZERSДокумент9 страницDETERMINING LOCATIONS FOR POWER SYSTEM STABILIZERSSherif HelmyОценок пока нет
- Lecture 3Документ39 страницLecture 3Sherif HelmyОценок пока нет
- A Simplified System For Subsynchronous Resonance StudiesДокумент6 страницA Simplified System For Subsynchronous Resonance StudiesSherif HelmyОценок пока нет
- Egyptian Electrical Grid Annual Report 2011Документ49 страницEgyptian Electrical Grid Annual Report 2011Sherif HelmyОценок пока нет
- First Benchmark Model For Computer Simulation of Subsynchronous ResonanceДокумент8 страницFirst Benchmark Model For Computer Simulation of Subsynchronous ResonanceSherif HelmyОценок пока нет
- Damping of Inter-Area Oscillations Using Energy StorageДокумент5 страницDamping of Inter-Area Oscillations Using Energy StorageSherif HelmyОценок пока нет
- Real Time Modeling of Synchronous Generator Based On PCДокумент7 страницReal Time Modeling of Synchronous Generator Based On PCSherif HelmyОценок пока нет
- 192Документ6 страниц192kfaliОценок пока нет
- Shia SДокумент145 страницShia SSherif HelmyОценок пока нет
- BOOKfm 6Документ161 страницаBOOKfm 6Sherif HelmyОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Bosch L Jetronic Injection Technical Instructions PDFДокумент40 страницBosch L Jetronic Injection Technical Instructions PDFjorge Angel LopeОценок пока нет
- Noise Margin Definition ExplainedДокумент10 страницNoise Margin Definition ExplainedAnil BhardwajОценок пока нет
- De Electric Circuits EeДокумент16 страницDe Electric Circuits EeLilet P. DalisayОценок пока нет
- Fluid MechanicsДокумент29 страницFluid Mechanicsaminur3rahman-1Оценок пока нет
- Abdel Jawad 2005Документ8 страницAbdel Jawad 2005Alberto Tupa OrtizОценок пока нет
- CAD/CAM Geometric Modelling RepresentationsДокумент34 страницыCAD/CAM Geometric Modelling Representationsshantikiran shantikiranОценок пока нет
- GEAS 1 - Chemistry - 2Документ4 страницыGEAS 1 - Chemistry - 2Leoneil Angelo AbreuОценок пока нет
- Ferroresonance During Single-Phase Switching of Distribution TransformersДокумент6 страницFerroresonance During Single-Phase Switching of Distribution TransformersDiego Betancourt MejiaОценок пока нет
- Mercury Gemini Program Design Survey. NASA ERC Design Criteria Program Stability, Guidance and ControlДокумент217 страницMercury Gemini Program Design Survey. NASA ERC Design Criteria Program Stability, Guidance and ControlBob Andrepont100% (1)
- The Mode of Eruptions and Their Tephra Deposits: Tetsuo K and Mitsuru OДокумент8 страницThe Mode of Eruptions and Their Tephra Deposits: Tetsuo K and Mitsuru OAnggit Tri AtmajaОценок пока нет
- Review: Modeling Damping in Mechanical Engineering StructuresДокумент10 страницReview: Modeling Damping in Mechanical Engineering Structuresuamiranda3518Оценок пока нет
- GicДокумент155 страницGicNikita KadamОценок пока нет
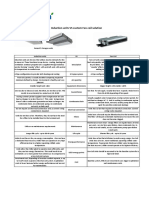
- HotelSolution: Induction Units VS Fan-Coil SolutionДокумент1 страницаHotelSolution: Induction Units VS Fan-Coil SolutionMoriyasu NguyenОценок пока нет
- Sec 3 Chemistry Practice QuestionsДокумент4 страницыSec 3 Chemistry Practice Questionschong56100% (1)
- Mousavi, Aliha, Imani - 2020 - On The Use of Edge Cracked Short Bend Beam Specimen For PMMA Fracture Toughness Testing Under Mixed-ModeДокумент1 страницаMousavi, Aliha, Imani - 2020 - On The Use of Edge Cracked Short Bend Beam Specimen For PMMA Fracture Toughness Testing Under Mixed-ModeMorteza AtaeiОценок пока нет
- Linear DC Machine PDFДокумент21 страницаLinear DC Machine PDFAbdul Aziz0% (1)
- Electronics Engg.: Detailed Solutions ofДокумент52 страницыElectronics Engg.: Detailed Solutions ofAshish ChoudharyОценок пока нет
- Machine Design: The Hidden Cause ofДокумент6 страницMachine Design: The Hidden Cause ofbbmokshОценок пока нет
- Magnetism Workhsheet Siap EditДокумент10 страницMagnetism Workhsheet Siap EditMamberamo ClassОценок пока нет
- WISDM-dataset-description 2Документ5 страницWISDM-dataset-description 2yuliasihkripsianditaОценок пока нет
- Department of Education: Humss 12 Cluster A and B Weekly Home Learning PlanДокумент3 страницыDepartment of Education: Humss 12 Cluster A and B Weekly Home Learning PlanRhomelyn AbellarОценок пока нет
- Gujarat Technological University: Page 1 of 3Документ3 страницыGujarat Technological University: Page 1 of 3DaxОценок пока нет
- Datasheet MPX5100DPДокумент16 страницDatasheet MPX5100DPKemahyanto Exaudi SiahaanОценок пока нет
- P7 Revision QuestionsДокумент4 страницыP7 Revision Questionsapi-27344426Оценок пока нет
- Oversized Particles in Emulsified Asphalts (Sieve Test) : Standard Test Method ForДокумент2 страницыOversized Particles in Emulsified Asphalts (Sieve Test) : Standard Test Method Forمحمد سليمان بن عمرОценок пока нет
- Printed Vesiontunable Optical Properties of Bi12Na12TiO3 Materials Via Sm12Na12TiO3Документ8 страницPrinted Vesiontunable Optical Properties of Bi12Na12TiO3 Materials Via Sm12Na12TiO3Vinh PhamОценок пока нет
- IS 516 (Part-2) Sec-1 - 2018Документ16 страницIS 516 (Part-2) Sec-1 - 2018Sai Pavan100% (9)
- Vector CalculusДокумент62 страницыVector CalculuswaleedОценок пока нет
- Data Sheet Otdr Fho5000 enДокумент2 страницыData Sheet Otdr Fho5000 enJulio RoDriguezОценок пока нет
- Problems On Beams PDFДокумент16 страницProblems On Beams PDFC j50% (6)