Вам также может понравиться
- The Fabian StrategyДокумент1 страницаThe Fabian StrategyBruno SantosОценок пока нет
- Pintura anticorrosiva: recomendações para preparo de superfície e aplicaçãoДокумент21 страницаPintura anticorrosiva: recomendações para preparo de superfície e aplicaçãomaiquel_mbtg739Оценок пока нет
- Primador epóxi para equipamentos industriaisДокумент5 страницPrimador epóxi para equipamentos industriaisBruno SantosОценок пока нет
- Pintura anticorrosiva: recomendações para especificação de tintasДокумент16 страницPintura anticorrosiva: recomendações para especificação de tintasLucio Viana HenriqueОценок пока нет
- Poster - Dicas e Calculos de Rigging PDFДокумент1 страницаPoster - Dicas e Calculos de Rigging PDFerich2014100% (2)
- Elementos FinitosДокумент1 страницаElementos FinitosBruno SantosОценок пока нет
- 9 de JulhoДокумент2 страницы9 de JulhoBruno SantosОценок пока нет
- Dissertação Sobre Pontes RolantesДокумент20 страницDissertação Sobre Pontes RolantesVitor Thasso FerrazОценок пока нет
- Turma Do ChavesДокумент8 страницTurma Do ChavesBruno SantosОценок пока нет
- Quando Usar Uma Partida Suave Ou Um Inversor de Frequência PDFДокумент22 страницыQuando Usar Uma Partida Suave Ou Um Inversor de Frequência PDFBruno SantosОценок пока нет
- WikipediaДокумент1 страницаWikipediaBruno SantosОценок пока нет
- Luiz Inácio Lula Da SilvaДокумент4 страницыLuiz Inácio Lula Da SilvaBruno SantosОценок пока нет
- El Chavo Del OchoДокумент1 страницаEl Chavo Del OchoBruno SantosОценок пока нет
- Terminologia e Símbolos de SoldagemДокумент8 страницTerminologia e Símbolos de SoldagemMarcos NОценок пока нет
- Guatemala PDFДокумент1 страницаGuatemala PDFBruno SantosОценок пока нет
- Lig Sold 11 PDFДокумент37 страницLig Sold 11 PDFEduardo Ataide de OliveiraОценок пока нет
- Tipos de roscas em milímetrosДокумент1 страницаTipos de roscas em milímetrosBruno Santos100% (1)
- Apostila Maquinas de Elevacao e TransporteДокумент215 страницApostila Maquinas de Elevacao e TransportecoutomarioОценок пока нет
- Quando Usar Uma Partida Suave Ou Um Inversor de Frequência PDFДокумент22 страницыQuando Usar Uma Partida Suave Ou Um Inversor de Frequência PDFBruno SantosОценок пока нет
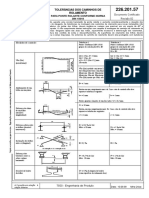
- Tolerâncias caminhos rolamento pontesДокумент1 страницаTolerâncias caminhos rolamento ponteslafssОценок пока нет
- Catálogo Insertos - Phoenix PDFДокумент124 страницыCatálogo Insertos - Phoenix PDFBruno SantosОценок пока нет
- Aulas6 7guias Fusos 2013 PDFДокумент69 страницAulas6 7guias Fusos 2013 PDFBruno SantosОценок пока нет
- Apostila Tratamento Térmico ComplementarДокумент4 страницыApostila Tratamento Térmico ComplementarLeo Quirino100% (1)
- Aula 1Документ9 страницAula 1ClaudioTRodriguesОценок пока нет
- Dimensionamento de Vigas de RolamentoДокумент17 страницDimensionamento de Vigas de RolamentoAlexandre Luiz VasconcellosОценок пока нет
- Catalogo BGL BuchasДокумент122 страницыCatalogo BGL BuchasWagner DO AmparoОценок пока нет
- Aula 14Документ32 страницыAula 14André CarvalhoОценок пока нет
- Indicadores de Pesagem Linha 3100C.SДокумент21 страницаIndicadores de Pesagem Linha 3100C.SFabricio Eduardo PereiraОценок пока нет
- Projeto de Uma Ponte RolanteДокумент395 страницProjeto de Uma Ponte RolanteBruno Santos50% (2)
- Dimensionamento de Pórtico Rolante Dupla Viga 100tДокумент155 страницDimensionamento de Pórtico Rolante Dupla Viga 100tBruno SantosОценок пока нет
- Baixar Arquivos SWFДокумент2 страницыBaixar Arquivos SWFRogerio VilelaОценок пока нет
- Mini-Curso Refinamento Rietveld Utilizando GSASДокумент13 страницMini-Curso Refinamento Rietveld Utilizando GSASandersanti19Оценок пока нет
- SAVAM - Upload 3.0.0 - SpedДокумент2 страницыSAVAM - Upload 3.0.0 - Spedfabiofiorani.sОценок пока нет
- Circuitos Lógicos TTLДокумент7 страницCircuitos Lógicos TTLGabriela ShimaОценок пока нет
- Leilão de máquinas e equipamentos para indústria calçadistaДокумент12 страницLeilão de máquinas e equipamentos para indústria calçadistaAnonymous 588rrrwZОценок пока нет
- DD-WRT Configuração e InstalaçãoДокумент25 страницDD-WRT Configuração e InstalaçãojoseОценок пока нет
- Integração TOTVS - Nexti - principais pontosДокумент1 страницаIntegração TOTVS - Nexti - principais pontosWanderson SilvaОценок пока нет
- Curso WorkflowДокумент64 страницыCurso Workflowthiarllisb100% (2)
- TV Led Philips 32pfl5606d 78 Fin BRPДокумент2 страницыTV Led Philips 32pfl5606d 78 Fin BRPmpbsilva100% (1)
- Benner - Configuração de Segurança para Usuários Não AdministradoresДокумент5 страницBenner - Configuração de Segurança para Usuários Não Administradoresclauber_cОценок пока нет
- Integral DefinidaДокумент5 страницIntegral Definidafernando meloОценок пока нет
- STC ng6 dr3 ft01Документ3 страницыSTC ng6 dr3 ft01Eva PintoОценок пока нет
- Software para Estudo de Viabilidade, Aproveitamento Hidrelétrico, Cadastro Multifinalitário.Документ18 страницSoftware para Estudo de Viabilidade, Aproveitamento Hidrelétrico, Cadastro Multifinalitário.MARIA NELY ALVARENGA LIMAОценок пока нет
- Introdução a um Sistema OperativoДокумент3 страницыIntrodução a um Sistema OperativoHugo AmaralОценок пока нет
- Regras e Tabelas para Projetos e FabricaçãoДокумент53 страницыRegras e Tabelas para Projetos e FabricaçãoRafael Giordani BeckerОценок пока нет
- Função Fork (Ubuntu)Документ6 страницFunção Fork (Ubuntu)Raphael FreitasОценок пока нет
- Revista Jogos80 Número 10Документ68 страницRevista Jogos80 Número 10ProjetodvdОценок пока нет
- Jogos 2D: Estilos e FormatosДокумент8 страницJogos 2D: Estilos e FormatosJosemar JuniorОценок пока нет
- ManualPrestador Demonstrativos PDFДокумент29 страницManualPrestador Demonstrativos PDFrodabcОценок пока нет
- Apostila Matemática Cálculo CEFET Capítulo 04 DerivadasДокумент50 страницApostila Matemática Cálculo CEFET Capítulo 04 DerivadasMatemática Mathclassy100% (1)
- Automação Industrial - LivroДокумент117 страницAutomação Industrial - Livrokaka43Оценок пока нет
- Análise de Regressão QuadráticaДокумент6 страницAnálise de Regressão QuadráticaRaniéri Mansur Plain0% (1)
- Técnicas de IA no Othello: um estudo comparativoДокумент50 страницTécnicas de IA no Othello: um estudo comparativoJuliana XavierОценок пока нет
- Livro Introdução A Visão Computacional Com Python e OpenCVДокумент46 страницLivro Introdução A Visão Computacional Com Python e OpenCVIsabela LopesОценок пока нет
- Aprendizagem significativa AusubelДокумент2 страницыAprendizagem significativa AusubelAndré TavaresОценок пока нет
- Programação Funcional em HaskellДокумент201 страницаProgramação Funcional em HaskellSelfConnectedОценок пока нет
- Curso de Marketing Digital OnlineДокумент3 страницыCurso de Marketing Digital OnlineCurso de E-CommerceОценок пока нет
- RPC - Código em Linguagem CДокумент5 страницRPC - Código em Linguagem CAlessandroОценок пока нет
- Análise Global Do Programa de Prevenção de Riscos Ambientais2Документ10 страницAnálise Global Do Programa de Prevenção de Riscos Ambientais2arlenemoreira50% (2)
- TI-Nspire CASДокумент289 страницTI-Nspire CASbrunei952352Оценок пока нет