Вам также может понравиться
- Optimization of A Motorcycle Wheel RimДокумент6 страницOptimization of A Motorcycle Wheel RimAnoop A KОценок пока нет
- Catia v5 6r2014 For Engineers and Designers PDF FreeДокумент2 страницыCatia v5 6r2014 For Engineers and Designers PDF FreeJasmeet SinghОценок пока нет
- CI 4 VelocityДокумент44 страницыCI 4 VelocitySayphone HoungbounyuangОценок пока нет
- Unit 1 Module 2 PDFДокумент26 страницUnit 1 Module 2 PDFKaradam Patel0% (1)
- Sheet Metalworking 2 - Chapter 19Документ67 страницSheet Metalworking 2 - Chapter 19xharpreetxОценок пока нет
- Tutorial M WorksДокумент171 страницаTutorial M WorksNazriОценок пока нет
- Corner L-Bracket From ANSYSДокумент29 страницCorner L-Bracket From ANSYSValeriu PseneacОценок пока нет
- AC Cast3M 2 PDFДокумент51 страницаAC Cast3M 2 PDFalbonifacОценок пока нет
- ROK Teknik LPG Cylinder Production Line CatalogДокумент8 страницROK Teknik LPG Cylinder Production Line CatalogROK TeknikОценок пока нет
- Autocad 3d PDFДокумент87 страницAutocad 3d PDFglazetmОценок пока нет
- BottleДокумент29 страницBottlesumikannuОценок пока нет
- Simplified Multi-Storey Shear Buildoing ModelДокумент22 страницыSimplified Multi-Storey Shear Buildoing ModelKmrnKhnОценок пока нет
- Mechanical Design Expert CATIA V5 PDFДокумент294 страницыMechanical Design Expert CATIA V5 PDFSonja ŠtefanacОценок пока нет
- Tolerances and Fits ExercisesДокумент7 страницTolerances and Fits ExercisesXacobe PiñeiroОценок пока нет
- Giant MPH-3 Disc Brake System Model Year 2002: Owners ManualДокумент24 страницыGiant MPH-3 Disc Brake System Model Year 2002: Owners Manuallock.offОценок пока нет
- Practicas Digiac 1750 1Документ18 страницPracticas Digiac 1750 1Saga Adolfo GonzalezОценок пока нет
- ManualДокумент1 195 страницManualDejan DrumacОценок пока нет
- Brochure MTFR 2017Документ4 страницыBrochure MTFR 2017MIGUEL LOPEZОценок пока нет
- Milling Attachment For Lathe: SynopsisДокумент4 страницыMilling Attachment For Lathe: SynopsisAVINASH BHUSAREОценок пока нет
- The Basics CFDДокумент63 страницыThe Basics CFDHuy TrầnОценок пока нет
- Exercice FrettageДокумент5 страницExercice Frettagemouhend10Оценок пока нет
- Design and Manuf of TribotesterДокумент23 страницыDesign and Manuf of Tribotesterozoemena29Оценок пока нет
- SurfaceRoughnessTester SRT-6210 SRT-6200 CatalogДокумент2 страницыSurfaceRoughnessTester SRT-6210 SRT-6200 CatalogMbimbikОценок пока нет
- APPLIED MECHANICS Paper 2Документ4 страницыAPPLIED MECHANICS Paper 2FOFUH RONALD NCHEGEH100% (1)
- Me301 Heat & Flow 3 Tutorial Questions (7) : PistonДокумент1 страницаMe301 Heat & Flow 3 Tutorial Questions (7) : PistonJeswin MathewОценок пока нет
- AutoCAD 2013Документ1 страницаAutoCAD 2013Dreamtech PressОценок пока нет
- Tuto EngrenageДокумент44 страницыTuto EngrenageAsmae AsseraouОценок пока нет
- Failure Analysis and Simulation Evaluation of An Alloy Wheel HubДокумент13 страницFailure Analysis and Simulation Evaluation of An Alloy Wheel HubShiva Kumar H GОценок пока нет
- M330VF Combination Lathe Mill Machine MAXNOVOДокумент3 страницыM330VF Combination Lathe Mill Machine MAXNOVOHeryanto SyamОценок пока нет
- Conception and Realization of A GyropodeДокумент83 страницыConception and Realization of A GyropodeSleem KsОценок пока нет
- Problem Set 3 Solution PDFДокумент10 страницProblem Set 3 Solution PDFHOUSSAME NAIMОценок пока нет
- Gamme D'usinage PDFДокумент2 страницыGamme D'usinage PDFMohamed SahilОценок пока нет
- Module 5-Shaper (Handouts)Документ9 страницModule 5-Shaper (Handouts)Fayyaz NadeemОценок пока нет
- How To Add Arduino Library in To Proteus 7 8Документ6 страницHow To Add Arduino Library in To Proteus 7 8sasa micinОценок пока нет
- Robot HonyenДокумент36 страницRobot HonyenVictor PATIÑOОценок пока нет
- Matlab Exercise 2a-2bДокумент2 страницыMatlab Exercise 2a-2bAyman SalehОценок пока нет
- Démontage RemontageДокумент19 страницDémontage RemontageFosseni DialloОценок пока нет
- DesignreviewiipaperДокумент26 страницDesignreviewiipaperapi-314103080Оценок пока нет
- 3dcs Variation Analyst MC PDFДокумент2 страницы3dcs Variation Analyst MC PDFWayuОценок пока нет
- Flow Simulation Report PRIMER TTRABAJOДокумент29 страницFlow Simulation Report PRIMER TTRABAJOGian MorenoОценок пока нет
- Spirit AerosystemДокумент5 страницSpirit AerosystemIffeym IswanОценок пока нет
- Development of Gyroscopic Effect On Two-Wheeler Vehicle StabilityДокумент20 страницDevelopment of Gyroscopic Effect On Two-Wheeler Vehicle StabilityYOGENDRA TEMBHURNEОценок пока нет
- SimaPro PHDДокумент1 страницаSimaPro PHDAnonymous zYW2HQlezdОценок пока нет
- 20 Sim ManualДокумент1 220 страниц20 Sim ManualAlan PazОценок пока нет
- Astakhov 2013 Cutting TribologyДокумент66 страницAstakhov 2013 Cutting TribologyFatih Hayati Çakır100% (2)
- EX.1 - Valve Timing DiagramДокумент5 страницEX.1 - Valve Timing Diagrammanojkhadka23Оценок пока нет
- Manual Cierra Cinta s20pДокумент43 страницыManual Cierra Cinta s20pJohana DelgadoОценок пока нет
- Help - SimMechanics Block Libraries - Introduction To SimMechanics Software (SimMechanics™)Документ3 страницыHelp - SimMechanics Block Libraries - Introduction To SimMechanics Software (SimMechanics™)ĐinhĐứcAnhОценок пока нет
- AC CUT EDM-Expert InterfaceДокумент16 страницAC CUT EDM-Expert InterfaceJosh TaylorОценок пока нет
- Tehnoloski Podaci Za Glodanje Na Emco Mill 55Документ5 страницTehnoloski Podaci Za Glodanje Na Emco Mill 55programiranjecncОценок пока нет
- Tutorial 7 Introduction To Airbag FoldingДокумент12 страницTutorial 7 Introduction To Airbag Foldingarthurs9792100% (1)
- KUKA KR 16 DatasheetДокумент1 страницаKUKA KR 16 DatasheetMahesh Nvsr BОценок пока нет
- Eurotech B700 SeriesДокумент4 страницыEurotech B700 SeriesCNC SYSTEMSОценок пока нет
- Project Report Granite Cutting Polishing UnitДокумент3 страницыProject Report Granite Cutting Polishing UnitSharan SwiftОценок пока нет
- Analysis of Mechanical Error in Quick-Return Shaper MechanismДокумент5 страницAnalysis of Mechanical Error in Quick-Return Shaper MechanismHaresh DesaiОценок пока нет
- Catia v6 PLMДокумент158 страницCatia v6 PLMPetru Bujenita100% (1)
- Indian Institute of Technology, Delhi: Department of Mechanical EnggДокумент0 страницIndian Institute of Technology, Delhi: Department of Mechanical EnggGeorge KaridisОценок пока нет
- Underground Mine DesignДокумент47 страницUnderground Mine Designalfri121Оценок пока нет
- 1 s2.0 S0304389421026054 MainДокумент24 страницы1 s2.0 S0304389421026054 MainFarah TalibОценок пока нет
- Expected MCQs CompressedДокумент31 страницаExpected MCQs CompressedAdithya kesavОценок пока нет
- Integrated Building Managemnt SystemДокумент8 страницIntegrated Building Managemnt SystemRitikaОценок пока нет
- CNS Manual Vol III Version 2.0Документ54 страницыCNS Manual Vol III Version 2.0rono9796Оценок пока нет
- Bs en 1991-1-5 2003 + 2009 Thermal Actions (Unsecured)Документ52 страницыBs en 1991-1-5 2003 + 2009 Thermal Actions (Unsecured)Tan Gui SongОценок пока нет
- Types of Electrical Protection Relays or Protective RelaysДокумент7 страницTypes of Electrical Protection Relays or Protective RelaysTushar SinghОценок пока нет
- Cara Membuat Motivation LetterДокумент5 страницCara Membuat Motivation LetterBayu Ade Krisna0% (1)
- M70-700 4th or 5th Axis Install ProcedureДокумент5 страницM70-700 4th or 5th Axis Install ProcedureNickОценок пока нет
- 1.2 The Main Components of Computer SystemsДокумент11 страниц1.2 The Main Components of Computer SystemsAdithya ShettyОценок пока нет
- MG206 Chapter 3 Slides On Marketing Principles and StrategiesДокумент33 страницыMG206 Chapter 3 Slides On Marketing Principles and StrategiesIsfundiyerTaungaОценок пока нет
- Carry Trade Calculator 1.54Документ3 страницыCarry Trade Calculator 1.54Gabriel RomanОценок пока нет
- Ucbackup Faq - Commvault: GeneralДокумент8 страницUcbackup Faq - Commvault: GeneralhherОценок пока нет
- A Study On Effective Training Programmes in Auto Mobile IndustryДокумент7 страницA Study On Effective Training Programmes in Auto Mobile IndustrySAURABH SINGHОценок пока нет
- Province of Camarines Sur vs. CAДокумент8 страницProvince of Camarines Sur vs. CACrisDBОценок пока нет
- Summary - A Short Course On Swing TradingДокумент2 страницыSummary - A Short Course On Swing TradingsumonОценок пока нет
- QP 4Документ4 страницыQP 4Yusra RaoufОценок пока нет
- AN610 - Using 24lc21Документ9 страницAN610 - Using 24lc21aurelioewane2022Оценок пока нет
- 11 TR DSU - CarrierДокумент1 страница11 TR DSU - Carriercalvin.bloodaxe4478100% (1)
- Chapter 1 Hospital and Clinical Pharmacy Choplete PDF Notes D.Pharma 2nd Notes PDF NoteskartsДокумент7 страницChapter 1 Hospital and Clinical Pharmacy Choplete PDF Notes D.Pharma 2nd Notes PDF NoteskartsDrx Brajendra LodhiОценок пока нет
- LISTA Nascar 2014Документ42 страницыLISTA Nascar 2014osmarxsОценок пока нет
- 01 Eh307 Crimpro Case Digests Part 1Документ214 страниц01 Eh307 Crimpro Case Digests Part 1Kimberly PerezОценок пока нет
- Fammthya 000001Документ87 страницFammthya 000001Mohammad NorouzzadehОценок пока нет
- BS en Iso 11666-2010Документ26 страницBS en Iso 11666-2010Ali Frat SeyranОценок пока нет
- scx4521f SeriesДокумент173 страницыscx4521f SeriesVuleticJovanОценок пока нет
- Shares and Share CapitalДокумент50 страницShares and Share CapitalSteve Nteful100% (1)
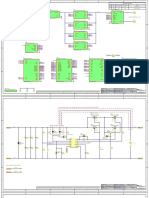
- Scheme Bidirectional DC-DC ConverterДокумент16 страницScheme Bidirectional DC-DC ConverterNguyễn Quang KhoaОценок пока нет
- Journalism Cover Letter TemplateДокумент6 страницJournalism Cover Letter Templateafaydebwo100% (2)
- Bondoc Vs PinedaДокумент3 страницыBondoc Vs PinedaMa Gabriellen Quijada-TabuñagОценок пока нет
- Si KaДокумент12 страницSi KanasmineОценок пока нет
- Harga H2H Pula-Paket Data - Saldo EWallet v31012022Документ10 страницHarga H2H Pula-Paket Data - Saldo EWallet v31012022lala cemiОценок пока нет