Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- B E MechДокумент363 страницыB E MechAnonymous p8bHAAxОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- DIMENSIONING NotesMirchiДокумент10 страницDIMENSIONING NotesMirchithamaraikkannangОценок пока нет
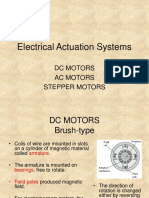
- Electrical Actuation Systems-Part 2Документ40 страницElectrical Actuation Systems-Part 2Anonymous p8bHAAxОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Projection of Points and PlanesДокумент30 страницProjection of Points and PlanesAnonymous p8bHAAxОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Kings: Department of Mechanical EngineeringДокумент11 страницKings: Department of Mechanical Engineeringrammit2007Оценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Computer Aided Design: Lecture NotesДокумент61 страницаComputer Aided Design: Lecture NotesbalacoeusОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Sections of Solids & Development of SurfaceДокумент12 страницSections of Solids & Development of SurfaceAnonymous p8bHAAxОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Iso QBДокумент2 страницыIso QBAnonymous p8bHAAxОценок пока нет
- Unit 4 MTCДокумент118 страницUnit 4 MTCAnonymous p8bHAAxОценок пока нет
- B.E. Mech PDFДокумент113 страницB.E. Mech PDFarulmuruguОценок пока нет
- ED7102-Computer Applications in DesignДокумент11 страницED7102-Computer Applications in DesignLOGANTKEC100% (2)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- New Picture PDFДокумент1 страницаNew Picture PDFAnonymous p8bHAAxОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- L 4Документ42 страницыL 4Guna RajОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Ferrous MetallurgyДокумент30 страницFerrous MetallurgyGaurav KumarОценок пока нет
- Polymer ProcessingДокумент28 страницPolymer ProcessingMousom SomОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Capd NotesДокумент14 страницCapd NotesAnonymous p8bHAAxОценок пока нет
- PolymersДокумент13 страницPolymersVaibhav ShrivastavaОценок пока нет
- Industrial RoboticsДокумент47 страницIndustrial Roboticspravdiv100% (2)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Mn7203 Material Testing and Characterization L T P CДокумент5 страницMn7203 Material Testing and Characterization L T P CAnonymous p8bHAAxОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Handout 6Документ10 страницHandout 6Anonymous p8bHAAxОценок пока нет
- Computer Graphics Lab ManualДокумент61 страницаComputer Graphics Lab ManualVivek KvОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Capd 2Документ7 страницCapd 2Anonymous p8bHAAxОценок пока нет
- Capd Imp QuesДокумент2 страницыCapd Imp QuesAnonymous p8bHAAxОценок пока нет
- Forms of Inventories NotesДокумент3 страницыForms of Inventories NotesAnonymous p8bHAAxОценок пока нет
- FEA Simulation of Metal CuttingДокумент6 страницFEA Simulation of Metal CuttingAnonymous p8bHAAxОценок пока нет
- Line AlgorithmДокумент62 страницыLine AlgorithmAnonymous p8bHAAxОценок пока нет
- Plant Location Plant Location or The Facilities Location Problem Is An Important Strategic Level Decision Making For AnДокумент2 страницыPlant Location Plant Location or The Facilities Location Problem Is An Important Strategic Level Decision Making For AnAnonymous p8bHAAxОценок пока нет
- On Equations of Motion of Elastic Linkages by FEMДокумент15 страницOn Equations of Motion of Elastic Linkages by FEMAnonymous p8bHAAxОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- R013968998 PDFДокумент10 страницR013968998 PDFAnonymous p8bHAAxОценок пока нет
- Velammal@velammal - Edu.in Velammal@velammal - Edu.in: Kind Attn: Mr. V.SrikanthДокумент6 страницVelammal@velammal - Edu.in Velammal@velammal - Edu.in: Kind Attn: Mr. V.SrikanthAnonymous p8bHAAxОценок пока нет
- Ds Internal 2 MaterialsДокумент22 страницыDs Internal 2 MaterialsmaxisОценок пока нет
- Limited Time Discount Offer! 15% Off - Ends in 01:59:35 - Use Discount Coupon Code A4T2023Документ6 страницLimited Time Discount Offer! 15% Off - Ends in 01:59:35 - Use Discount Coupon Code A4T2023Caner kutamışОценок пока нет
- P2 E333 enДокумент79 страницP2 E333 enMabo81Оценок пока нет
- Master MST3000 Motorcycle Scanner User ManualДокумент18 страницMaster MST3000 Motorcycle Scanner User Manualobd365Оценок пока нет
- Cloud Computing Notes For BSC and BCAДокумент48 страницCloud Computing Notes For BSC and BCAPvlsowjanya100% (4)
- HP 15r157nr Laa994pr10 SchematicsДокумент44 страницыHP 15r157nr Laa994pr10 SchematicsuzenhoОценок пока нет
- 300-435-ENAUTO Automating Cisco Enterprise Solutions PDFДокумент3 страницы300-435-ENAUTO Automating Cisco Enterprise Solutions PDFEduОценок пока нет
- 1602-18-737-071 ES&IOT Lab 1 - MergedДокумент139 страниц1602-18-737-071 ES&IOT Lab 1 - Mergedcity cyberОценок пока нет
- TP08 257b PDFДокумент8 страницTP08 257b PDFPhet CopywayОценок пока нет
- Implementation of Non Restoring Interval Divider UnitДокумент4 страницыImplementation of Non Restoring Interval Divider Unitsurendiran123Оценок пока нет
- Customized Electronic DictionaryДокумент75 страницCustomized Electronic Dictionaryakg_Оценок пока нет
- Final Exam (Study Guide 2 Questions)Документ13 страницFinal Exam (Study Guide 2 Questions)i_gilОценок пока нет
- WINCC User1Документ468 страницWINCC User1Ngọc Nguyễn ThanhОценок пока нет
- Tips For Organizing Files in Your ComputerДокумент2 страницыTips For Organizing Files in Your ComputerLuis ZapataОценок пока нет
- Deedy CVДокумент1 страницаDeedy CVHelloadcbОценок пока нет
- Distributed Object-Based System: CORBA : Common Object Request Broker ArchitectureДокумент17 страницDistributed Object-Based System: CORBA : Common Object Request Broker ArchitectureVenu Gopal PОценок пока нет
- DF3120 Hack LinuxДокумент22 страницыDF3120 Hack LinuxVictor Adhitya100% (1)
- Building The SAP-3 Rev 2.0 PDFДокумент58 страницBuilding The SAP-3 Rev 2.0 PDFOMKAR BHILAREОценок пока нет
- WikiДокумент102 страницыWikibharath_mv7-1Оценок пока нет
- MAD - MINI - PROJECT - TIC - TACK - GAME Mre PDFДокумент18 страницMAD - MINI - PROJECT - TIC - TACK - GAME Mre PDFNishanthОценок пока нет
- Bondi Reader ManualДокумент13 страницBondi Reader ManualTomescu DragosОценок пока нет
- Debug 1214Документ3 страницыDebug 1214Khalifa Aldila PutraОценок пока нет
- MIDIPLUS Manual Origin62 EN V1.3Документ14 страницMIDIPLUS Manual Origin62 EN V1.3Diego SantosОценок пока нет
- CS6411 Network Lab ManualДокумент346 страницCS6411 Network Lab ManualmtkkumaranОценок пока нет
- RF InstallДокумент32 страницыRF InstallNiko ChuОценок пока нет
- Updated Questions 350-401 2Документ16 страницUpdated Questions 350-401 2Amila DissanayakeОценок пока нет
- COMP5070 Week 01 PracticeДокумент25 страницCOMP5070 Week 01 Practice一舊雲一舊雲Оценок пока нет
- Galileo RCS - Installing The Entire Espionage Platform - Hyperion BristolДокумент7 страницGalileo RCS - Installing The Entire Espionage Platform - Hyperion BristolAli Asad SahuОценок пока нет
- Inheritance Group3Документ41 страницаInheritance Group3breeОценок пока нет
- Definition of A Stack: Stack Overflow Happens When We Try To Push One More Item Onto Our Stack Than It Can ActuallyДокумент1 страницаDefinition of A Stack: Stack Overflow Happens When We Try To Push One More Item Onto Our Stack Than It Can ActuallyËnírëhtäc Säntös BälïtëОценок пока нет