Вам также может понравиться
- AlgebraДокумент39 страницAlgebraDivya GersappaОценок пока нет
- Attacking Problems in Logarithms and Exponential FunctionsОт EverandAttacking Problems in Logarithms and Exponential FunctionsРейтинг: 5 из 5 звезд5/5 (1)
- g9 Mtap ReviewerДокумент41 страницаg9 Mtap ReviewerAjo Sjeaony TeancealОценок пока нет
- Lesson 1 Differential Calculus IntroductionДокумент73 страницыLesson 1 Differential Calculus IntroductionAngelica Marie DiegoОценок пока нет
- Multi-Step Equations - Intermediate AlgebraДокумент20 страницMulti-Step Equations - Intermediate Algebraarthur aragoОценок пока нет
- FKB UEN8thGradeMath Mathematical Foundations Complete OERДокумент160 страницFKB UEN8thGradeMath Mathematical Foundations Complete OERomalasalatОценок пока нет
- Solving Equations: Word ExamplesДокумент5 страницSolving Equations: Word ExamplesWeb BooksОценок пока нет
- MathДокумент35 страницMathbritaniaОценок пока нет
- Chapter 2 Equations and InequalitiesДокумент5 страницChapter 2 Equations and InequalitiesLeonessa CortesОценок пока нет
- PMA1014 - Linear Algebra Academic Year 2009/2010 Thomas Huettemann and Ivan TodorovДокумент40 страницPMA1014 - Linear Algebra Academic Year 2009/2010 Thomas Huettemann and Ivan TodorovTom DavisОценок пока нет
- Lesson 4 Exponential FunctionДокумент38 страницLesson 4 Exponential FunctionAlfred Fegalan100% (1)
- Linear Diophantine EquationsДокумент7 страницLinear Diophantine EquationsHazel Clemente CarreonОценок пока нет
- AafmtДокумент228 страницAafmtShailanie Valle RiveraОценок пока нет
- Linear Programming (In A Nutshell)Документ23 страницыLinear Programming (In A Nutshell)Amrendar KumarОценок пока нет
- Advanced Mathematics - Chapter 2Документ22 страницыAdvanced Mathematics - Chapter 2cherrrryОценок пока нет
- Mooc Bomba Uganda To TangaДокумент25 страницMooc Bomba Uganda To TangaAlhaj MassoudОценок пока нет
- How Can We Prove That These Are Irrational Numbers?Документ43 страницыHow Can We Prove That These Are Irrational Numbers?Sazid KhanОценок пока нет
- Exponents and RadicalsДокумент27 страницExponents and RadicalsLeonessa CortesОценок пока нет
- MTAP Reviewer G-9Документ18 страницMTAP Reviewer G-9Rose Mary Millan-Arellano VelascoОценок пока нет
- Da TotalДокумент15 страницDa TotalAUGUSTO JOSE JoseОценок пока нет
- Complex Numbers: Learning OutcomesДокумент52 страницыComplex Numbers: Learning OutcomesAnb BajwaОценок пока нет
- Definition Linear Equation in One Variable: Axb C A B CДокумент2 страницыDefinition Linear Equation in One Variable: Axb C A B CRhea Jane B. CatalanОценок пока нет
- Grade 9 Math Review Chapter ThreeДокумент5 страницGrade 9 Math Review Chapter ThreeCourseCentralОценок пока нет
- Latest Notes 2024Документ2 страницыLatest Notes 2024jibapo5785Оценок пока нет
- COLLEGE AND ADVANCE ALGEBRA Chapter 5Документ17 страницCOLLEGE AND ADVANCE ALGEBRA Chapter 5Myla VelascoОценок пока нет
- Matthias Beck The Linear Diophantine Problem of Frobenius PDFДокумент9 страницMatthias Beck The Linear Diophantine Problem of Frobenius PDFAnonymous va7umdWyhОценок пока нет
- Algebra 2 Crash Course Semester 1Документ17 страницAlgebra 2 Crash Course Semester 1Griffin Puatu100% (1)
- How To Solve An EquationДокумент6 страницHow To Solve An Equationapi-126876773Оценок пока нет
- Collection of Lesson PlansДокумент4 страницыCollection of Lesson Plansapi-231033473Оценок пока нет
- IE234 Lesson 1Документ3 страницыIE234 Lesson 1Loraine CastilloОценок пока нет
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurДокумент18 страницComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurRanganathan .kОценок пока нет
- Math 101 Unit 2 Lesson 1.Документ31 страницаMath 101 Unit 2 Lesson 1.Paul John PanganibanОценок пока нет
- Lecture 1 Introduction To Number Theory, MAT115AДокумент6 страницLecture 1 Introduction To Number Theory, MAT115ALaura Craig100% (1)
- Integer Programming and Cryptography: H. W. Lenstra, JRДокумент6 страницInteger Programming and Cryptography: H. W. Lenstra, JRanitadas19Оценок пока нет
- Algebraic Expressions ReviewerДокумент24 страницыAlgebraic Expressions ReviewerAlyanna BustamanteОценок пока нет
- Silvat Task PlanДокумент22 страницыSilvat Task Planapi-610546865Оценок пока нет
- Divide and ConquerДокумент20 страницDivide and ConquerVinay MishraОценок пока нет
- Learning Material 1Документ18 страницLearning Material 1Loreth Aurea OjastroОценок пока нет
- Basic Law in MathematicsДокумент7 страницBasic Law in MathematicsRahmayani AshariОценок пока нет
- MITOCW - MITRES - 18-007 - Part4 - Lec3 - 300k.mp4: ProfessorДокумент18 страницMITOCW - MITRES - 18-007 - Part4 - Lec3 - 300k.mp4: Professorgaur1234Оценок пока нет
- Ordering Numbers and Absolute Value: A and B Are Two Real Numbers Such ThatДокумент4 страницыOrdering Numbers and Absolute Value: A and B Are Two Real Numbers Such ThatMuhammad ShamoeelОценок пока нет
- Pre Calculus PrimerДокумент17 страницPre Calculus PrimeracsimsОценок пока нет
- FM101 Unit 1 26-04Документ24 страницыFM101 Unit 1 26-04Maciu TuilevukaОценок пока нет
- Exponents Units Portfolio Kelaiah SalustianoДокумент8 страницExponents Units Portfolio Kelaiah Salustianoapi-302927729Оценок пока нет
- Systems of Linear Equations: Solve For A Variable Solve For XДокумент3 страницыSystems of Linear Equations: Solve For A Variable Solve For Xapi-128664841Оценок пока нет
- Review Packet 2 - Algebra I Notes (2015)Документ10 страницReview Packet 2 - Algebra I Notes (2015)Sandra MillerОценок пока нет
- Algebra Practice ProblemsДокумент7 страницAlgebra Practice Problemsapi-126876773Оценок пока нет
- Research Article Related To Quadratic Equations-1Документ6 страницResearch Article Related To Quadratic Equations-1Ayesha ArshadОценок пока нет
- RZC Chp3 Algebra SlidesДокумент49 страницRZC Chp3 Algebra SlidesJane ChangОценок пока нет
- Rules of Exponents: Exponents Multiplication Operations Division Expressions BaseДокумент10 страницRules of Exponents: Exponents Multiplication Operations Division Expressions BaseAhmad0% (1)
- Linear Programming Notes V Problem TransformationsДокумент6 страницLinear Programming Notes V Problem TransformationsPollartОценок пока нет
- An Introduction To Real Analysis. Using The Book, Analysis: Introduction To Proof, by Steven Lay.Документ76 страницAn Introduction To Real Analysis. Using The Book, Analysis: Introduction To Proof, by Steven Lay.cyrusartakОценок пока нет
- Trinomial FactoringДокумент7 страницTrinomial Factoringapi-127466285Оценок пока нет
- Partial Fractions PDFДокумент4 страницыPartial Fractions PDFmadsalimiОценок пока нет
- Unit1StudentNotesSP2012 3Документ15 страницUnit1StudentNotesSP2012 3Erin WilsonОценок пока нет
- Week1 Math 117 Abstract AlgebraДокумент40 страницWeek1 Math 117 Abstract AlgebraMark OlitinОценок пока нет
- Dania & MayaДокумент11 страницDania & MayaArati DashОценок пока нет
- Rumaysa Bint MilhanДокумент2 страницыRumaysa Bint Milhanabou78Оценок пока нет
- Теория Перевода ВОУД ПД 2 Курс РАП21Документ46 страницТеория Перевода ВОУД ПД 2 Курс РАП21Joe MilnerОценок пока нет
- (Akira Takayama) Analytical Methods in EconomicsДокумент693 страницы(Akira Takayama) Analytical Methods in EconomicsCarla Valverde España100% (4)
- Connections and SymbolsДокумент253 страницыConnections and SymbolsMarko CetrovivcОценок пока нет
- Separate PeaceДокумент28 страницSeparate PeaceYosep Lee100% (2)
- Mathematical Model To Design Rack and Pinion Ackerman Steering GeomteryДокумент5 страницMathematical Model To Design Rack and Pinion Ackerman Steering GeomteryIntiGowthamSai100% (1)
- Family Thesis StatementДокумент6 страницFamily Thesis Statementfc3kh880100% (2)
- Factors Affecting Dropout Rate at Secondary School Level in Private Schools of Punjab, PakistanДокумент7 страницFactors Affecting Dropout Rate at Secondary School Level in Private Schools of Punjab, PakistanImran Malik ImranОценок пока нет
- AP Euro Syllabus 2017-2018Документ17 страницAP Euro Syllabus 2017-2018Armin Chicherin100% (1)
- DanielperezkevinseguraДокумент1 страницаDanielperezkevinseguraapi-198345293Оценок пока нет
- Cultural Criticism in Egyptian Women's WritingДокумент29 страницCultural Criticism in Egyptian Women's WritingSarahОценок пока нет
- Optical Properties of Isotropic MineralsДокумент6 страницOptical Properties of Isotropic MineralsFadlin IdrusОценок пока нет
- Three Types of Artificial IntelligenceДокумент4 страницыThree Types of Artificial IntelligenceAlishbah Khan NiaziiОценок пока нет
- Lakshmi Mantras To Chant For Success, Prosperity and WealthДокумент5 страницLakshmi Mantras To Chant For Success, Prosperity and WealthDurgaОценок пока нет
- (Sample) LET General Education 12 - Mattrixx Reviewers (BLEPT) PDFДокумент38 страниц(Sample) LET General Education 12 - Mattrixx Reviewers (BLEPT) PDFJong FrancoОценок пока нет
- EuroProB2 Web CoursebookДокумент124 страницыEuroProB2 Web Coursebookencipunci100% (1)
- Bbe Minutes Sem III, 2012Документ8 страницBbe Minutes Sem III, 2012Sdrt YdvОценок пока нет
- 150+ New World Order Globalist Agenda QuotesДокумент59 страниц150+ New World Order Globalist Agenda Quoteskitty katОценок пока нет
- Opinion ParagraphДокумент1 страницаOpinion Paragraphapi-273326408Оценок пока нет
- BRMM 575 Chapter 2Документ5 страницBRMM 575 Chapter 2Moni TafechОценок пока нет
- College of St. John - Roxas: ACTIVITY SHEETS (WEEK 2-Methods of Philosophizing)Документ3 страницыCollege of St. John - Roxas: ACTIVITY SHEETS (WEEK 2-Methods of Philosophizing)Lalaine LuzaОценок пока нет
- Kaisa Koskinen and Outi Paloposki. RetranslationДокумент6 страницKaisa Koskinen and Outi Paloposki. RetranslationMilagros Cardenes0% (1)
- Strategy and Tactics of Distributive BargainingДокумент58 страницStrategy and Tactics of Distributive BargainingAnh BVОценок пока нет
- Unit 6 Chi-Square Distribution SLMДокумент22 страницыUnit 6 Chi-Square Distribution SLMVineet SharmaОценок пока нет
- Jack Canfield SuccessДокумент49 страницJack Canfield Successknfzed100% (1)
- Types of Syllabus and Models of Organization 1Документ3 страницыTypes of Syllabus and Models of Organization 1Peeta EsdenОценок пока нет
- Psychoanalytic CriticismДокумент2 страницыPsychoanalytic CriticismTimothy CraigОценок пока нет
- BaZi Basico PDFДокумент54 страницыBaZi Basico PDFMelnicof DanyОценок пока нет
- Category Total Views: 822 This Poetry Has Been Rated 0 Times Rate This PoemДокумент2 страницыCategory Total Views: 822 This Poetry Has Been Rated 0 Times Rate This PoemrajikrajanОценок пока нет
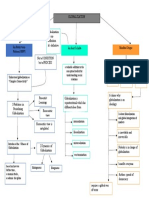
- GCWORLD Concept MapДокумент1 страницаGCWORLD Concept MapMoses Gabriel ValledorОценок пока нет