Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- 1004 AДокумент20 страниц1004 Accarbajal_3Оценок пока нет
- Usb 6008 Starting Guide 2Документ8 страницUsb 6008 Starting Guide 2ccarbajal_3Оценок пока нет
- Organizador PLC PDFДокумент8 страницOrganizador PLC PDFccarbajal_3Оценок пока нет
- Daq Ni Usb 6009Документ30 страницDaq Ni Usb 6009ramiro_vicente_6Оценок пока нет
- Manual ML600 - GEДокумент36 страницManual ML600 - GEccarbajal_3Оценок пока нет
- Usb 6008 6009Документ1 страницаUsb 6008 6009ccarbajal_3Оценок пока нет
- Organizador PLC PDFДокумент8 страницOrganizador PLC PDFccarbajal_3Оценок пока нет
- Multi LinkДокумент12 страницMulti Linkccarbajal_3Оценок пока нет
- HP Z210 Workstations - EspecifДокумент2 страницыHP Z210 Workstations - Especifccarbajal_3Оценок пока нет
- Encoder Mini h9700Документ13 страницEncoder Mini h9700Ramirez ManuelОценок пока нет
- Manual ML600 - GEДокумент36 страницManual ML600 - GEccarbajal_3Оценок пока нет
- Motor 24V 25W 3000rpmДокумент17 страницMotor 24V 25W 3000rpmccarbajal_3Оценок пока нет
- FFT Matlab TutorialДокумент6 страницFFT Matlab Tutorialichwan13Оценок пока нет
- Organizador PLC PDFДокумент8 страницOrganizador PLC PDFccarbajal_3Оценок пока нет
- Protector Transitorios - Patton 503S (Pozos)Документ4 страницыProtector Transitorios - Patton 503S (Pozos)ccarbajal_3Оценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Ramrajya 2025Документ39 страницRamrajya 2025maxabs121Оценок пока нет
- Computerised Project Management PDFДокумент11 страницComputerised Project Management PDFsrishti deoli50% (2)
- Cpar Final Written Exam 1Документ3 страницыCpar Final Written Exam 1Jeden RubiaОценок пока нет
- Problem SetsДокумент69 страницProblem SetsAnnagrazia ArgentieriОценок пока нет
- Case Study StarbucksДокумент2 страницыCase Study StarbucksSonal Agarwal100% (2)
- Dimitris Achlioptas Ucsc Bsoe Baskin School of EngineeringДокумент22 страницыDimitris Achlioptas Ucsc Bsoe Baskin School of EngineeringUCSC Students100% (1)
- Compressed Air Source BookДокумент128 страницCompressed Air Source Bookgfollert100% (1)
- Genstat Release 10.3de (Pc/Windows 7) 28 May 2012 06:35:59Документ6 страницGenstat Release 10.3de (Pc/Windows 7) 28 May 2012 06:35:59Anna Nur HidayatiОценок пока нет
- Chapter 1Документ20 страницChapter 1Li YuОценок пока нет
- Updated PDPДокумент540 страницUpdated PDPnikulaaaasОценок пока нет
- Ref Drawing 2. Ref Code: 3. Design DatasДокумент3 страницыRef Drawing 2. Ref Code: 3. Design DatasJoe Nadakkalan100% (3)
- Syllabus Math 305Документ4 страницыSyllabus Math 305Nataly SusanaОценок пока нет
- Corporate Governance Guidelines GMДокумент15 страницCorporate Governance Guidelines GMWaqas MahmoodОценок пока нет
- (Guide) Supercharger V6 For Everyone, Make Your Phone Faster - Xda-DevelopersДокумент7 страниц(Guide) Supercharger V6 For Everyone, Make Your Phone Faster - Xda-Developersmantubabu6374Оценок пока нет
- Design and Implementation of Hotel Management SystemДокумент36 страницDesign and Implementation of Hotel Management Systemaziz primbetov100% (2)
- Article On Role of Cyberspace in Geopolitics-PegasusДокумент5 страницArticle On Role of Cyberspace in Geopolitics-PegasusIJRASETPublicationsОценок пока нет
- 2018 International Swimming Pool and Spa CodeДокумент104 страницы2018 International Swimming Pool and Spa CodeEngFaisal Alrai100% (3)
- Far 2 Quiz 03212024Документ6 страницFar 2 Quiz 03212024red118831Оценок пока нет
- Case 1394 Moteur 1 2Документ36 страницCase 1394 Moteur 1 2ionel ianosОценок пока нет
- Standards Guide 1021 1407Документ8 страницStandards Guide 1021 1407Anjur SiОценок пока нет
- CCBA Exam: Questions & Answers (Demo Version - Limited Content)Документ11 страницCCBA Exam: Questions & Answers (Demo Version - Limited Content)begisep202Оценок пока нет
- CAKUTДокумент50 страницCAKUTsantosh subediОценок пока нет
- Role of Quick Response To Supply ChainДокумент15 страницRole of Quick Response To Supply ChainSanuwar RashidОценок пока нет
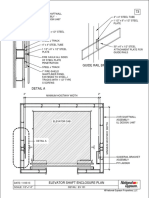
- Guide Rail Bracket AssemblyДокумент1 страницаGuide Rail Bracket AssemblyPrasanth VarrierОценок пока нет
- John Paul Jackson Prophecies of The FutureДокумент15 страницJohn Paul Jackson Prophecies of The FutureMeranda Devan100% (9)
- Lesson Plan Outline - Rebounding - Perez - JoseДокумент7 страницLesson Plan Outline - Rebounding - Perez - JoseJose PerezОценок пока нет
- User Manual - Wellwash ACДокумент99 страницUser Manual - Wellwash ACAlexandrОценок пока нет
- Fallas Compresor Copeland-DesbloqueadoДокумент16 страницFallas Compresor Copeland-DesbloqueadoMabo MabotecnicaОценок пока нет
- Transportation Engineering Unit I Part I CTLPДокумент60 страницTransportation Engineering Unit I Part I CTLPMadhu Ane NenuОценок пока нет
- Case Study Managed ServicesДокумент2 страницыCase Study Managed ServicesAshtangram jhaОценок пока нет