Академический Документы
Профессиональный Документы
Культура Документы
Aulas1 21
Загружено:
ErnaneufuОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Aulas1 21
Загружено:
ErnaneufuАвторское право:
Доступные форматы
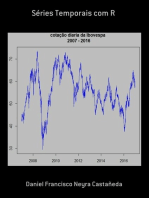
Metodo de Elementos Finitos: Teoria Basica
Frederic VALENTIN
12 de dezembro de 2011
2
Sumario
1 Conceitos Basicos 7
1.1 Exemplo 1D: Elemento Linear por Partes . . . . . . . . . . . . . . . . 7
1.1.1 Forma Fraca . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.1.2 Metodo de Galerkin . . . . . . . . . . . . . . . . . . . . . . . . 10
1.1.3 Melhor Approximacao . . . . . . . . . . . . . . . . . . . . . . 11
1.1.4 O Metodo de Elementos Finitos: Elemento Linear por Partes . 13
1.1.5 Interpolacao e estimativa de erro . . . . . . . . . . . . . . . . 16
1.2 Exemplo 2D: Elemento Linear por Partes . . . . . . . . . . . . . . . . 19
1.2.1 Forma Fraca . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.2.2 Metodo de Galerkin . . . . . . . . . . . . . . . . . . . . . . . . 20
1.2.3 Melhor Aproximacao . . . . . . . . . . . . . . . . . . . . . . . 20
1.2.4 Metodo de Elementos Finitos Lineares por Partes . . . . . . . 21
1.2.5 Interpolacao e estimativa de erro . . . . . . . . . . . . . . . . 23
2 Formulacao Contnua 25
2.1 Formulac ao Variacional de uma EDP . . . . . . . . . . . . . . . . . . 25
2.1.1 Formas e operadores . . . . . . . . . . . . . . . . . . . . . . . 26
2.1.2 Espacos de Hilbert . . . . . . . . . . . . . . . . . . . . . . . . 28
2.1.3 Representac oes das Formas Lineares Continuas . . . . . . . . 31
2.2 Existencia e Unicidade . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.3 Exemplos de Formula coes Variacionais . . . . . . . . . . . . . . . . . 37
2.3.1 Equacao de Laplace Homogenea . . . . . . . . . . . . . . . . . 37
2.3.2 Equacao de Laplace N ao Homogenea . . . . . . . . . . . . . . 38
2.3.3 Equacao advec cao-difus ao . . . . . . . . . . . . . . . . . . . . 39
3
4 SUM
ARIO
3 Formulacao Discreta 41
3.1 Metodo de Galerkin . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.2 Melhor Aproximac ao: Lema de Cea . . . . . . . . . . . . . . . . . . . 42
4 Metodo de Elementos Finitos 45
4.1 Exemplos de Elementos Finitos . . . . . . . . . . . . . . . . . . . . . 48
4.1.1 Elemento de Lagrange linear em 2D . . . . . . . . . . . . . . . 48
4.1.2 Elemento de Lagrange quadr atico em 2D . . . . . . . . . . . . 49
4.1.3 Elemento de Lagrange bilinear em 2D . . . . . . . . . . . . . . 50
4.1.4 Elemento de Hermite 2D . . . . . . . . . . . . . . . . . . . . . 51
4.1.5 Elemento de Raviart-Thomas 2D . . . . . . . . . . . . . . . . 52
4.2 Elemento Finito de Lagrange P
k
(K) em R
d
. . . . . . . . . . . . . . . 53
4.2.1 Elemento d-simplex . . . . . . . . . . . . . . . . . . . . . . . . 53
4.2.2 Coordenadas baricentricas . . . . . . . . . . . . . . . . . . . . 55
4.3 Noc ao de Elemento de Referencia . . . . . . . . . . . . . . . . . . . . 62
4.4 Elemento Finito Global de Lagrange P
k
() . . . . . . . . . . . . . . . 66
4.4.1 Malha de elementos nitos . . . . . . . . . . . . . . . . . . . . 66
4.4.2 Graus de liberdade globais . . . . . . . . . . . . . . . . . . . . 67
4.4.3 Espaco global de elementos nitos . . . . . . . . . . . . . . . . 68
4.5 Aproxima cao Polinomial . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.5.1 Erro de interpolac ao local . . . . . . . . . . . . . . . . . . . . 69
4.5.2 Erro de interpolac ao global . . . . . . . . . . . . . . . . . . . . 72
5 Aplicacao do Metodo de Elementos Finitos 75
5.1 Elemento nito de Lagrange de ordem P
k
() . . . . . . . . . . . . . . 75
Lista de Figuras
1.1 Uma func ao em C
1
(esquerda) e derivada da fun cao (direita). . . . . 8
1.2 Projec ao de uma func ao em V sobre V
h
usando a(., .). . . . . . . . . . 12
1.3 Exemplo de uma fun cao linear por partes. . . . . . . . . . . . . . . . 13
1.4 Func ao de base
j
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5 Exemplo de
i
e
j
com |i j| > 1. . . . . . . . . . . . . . . . . . . . 15
1.6 Exemplo de
i
e
j
com |i j| = 1. . . . . . . . . . . . . . . . . . . . 15
1.7 Exemplo de
i
=
j
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.8 Interpolac ao da fun cao u por uma func ao linear por partes u
h
. . . . . 17
1.9 Func ao de Green (esquerda) e derivada da func ao de Green (direita). 18
1.10 Triangularizacao conforme (esquerda) e n ao conforme (direita). . . . . 21
1.11 Uma fun cao de base linear
j
. . . . . . . . . . . . . . . . . . . . . . . 22
1.12 Nos associados as
j
com a propriedade a(
i
,
j
) = 0. . . . . . . . . 23
1.13 Numerac ao onde a(
3
,
4
) = 0 e onde a(
3
,
4
) = 0 (direita). . . . . 23
2.1 Exemplo de uma sequencia em C
0
(
) (esquerda) que nao tem limite
(direita) em C
0
(
). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2 Projec ao de um vetor v V sobre o subespaco M. . . . . . . . . . . . 31
4.1 Elementos nitos triangulares P
1
(K) (a) e P
2
(K) (b). . . . . . . . . . 49
4.2 Elemento nito rectangular Q
1
(K). . . . . . . . . . . . . . . . . . . . 50
4.3 Elementos nitos triangulares de Hermite (esquerda) e de RT0 (direita). 51
4.4 Exemplos de d-simplex em 1D (esquerda), 2D (centro), e 3D (direita). 53
4.5 Visualizac ao dos aspectos geometricos. . . . . . . . . . . . . . . . . . 54
4.6 Exemplos de domnios d-simplex em 1D (esquerda) e 2D (direita). O
da direita tambem mostra os vetores independentes a
1
a
3
e a
2
a
3
. 58
5
6 LISTA DE FIGURAS
4.7 Exemplos de domnios d-simplex unit arios em 1D (esquerda) e 2D
(direita). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.8 Exemplos de grades principais T
k
(K) em 1D com k = 0 (esquerda),
k = 1 (centro) e k = 2 (direita). . . . . . . . . . . . . . . . . . . . . . 60
4.9 Exemplos de grades principais T
k
(K) em 2D com k = 0 (esquerda),
k = 1 (centro) e k = 2 (direita). . . . . . . . . . . . . . . . . . . . . . 60
4.10 Exemplo de grade principal T
3
(K) em 2D. . . . . . . . . . . . . . . . 60
4.11 Exemplos de func oes de base quadraticas associadas a um vertice
(esquerda) e a um ponto no meio de uma aresta (direita) de um
tri angulo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.12 O 1-simplex (esquerda) e o 2-simplex (direita) de referencia. . . . . . 63
4.13 Ac ao da matriz B. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.14 Exemplo de um mapeamento bijetivo entre o elemento de referencia
e um elemento fsico. . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.15 Mapeamento entre o elemento nito de referencia e um elemento fsico. 66
4.16 Partic ao regular {T
h
}
h>0
que nao e quasi-uniforme. . . . . . . . . . . 67
4.17 Dois tri angulos adjacentes em uma malha nao estrutura. . . . . . . . 68
Captulo 1
Conceitos Basicos
1.1 Exemplo 1D: Elemento Linear por Partes
1.1.1 Forma Fraca
Seja f = f(x) C
0
([0, 1]) e considere o seguinte problema de valor de contorno:
_
_
Achar u = u(x) C
2
([0, 1]) tal que
d
2
u
dx
2
= f, em I := (0, 1),
u(0) = 0,
u
(1) = 0,
(1.1)
Logo (1.1) tem soluc ao unica.
Observacao 1.1. Observe que u C
2
([0, 1]) signica que u e as primeiras duas
derivadas s ao continuo.
Qual o sentido de (1.1) se u / C
2
([0, 1])?
Podemos propor um problema que generaliza (1.1), isto e, tal que sua soluc ao
coincida com a de (1.1) quando u C
2
([0, 1])? (Veja Figura 1.1)
Seja v uma fun cao sucientemente regular tal que v(0) = 0. Multiplicando
(1.1) por v e integrando-a temos
1
0
d
2
u
dx
2
v dx =
1
0
f v dx := (f, v)
I
. (1.2)
Utilizando a formula de Green (integrac ao por partes) temos
1
0
d
2
u
dx
2
v dx =
1
0
u
dx u
(1)v(1) + u
(0)v(0)
=
1
0
u
dx := a(u, v).
7
8 CAP
ITULO 1. CONCEITOS B
ASICOS
Figura 1.1: Uma fun cao em C
1
(esquerda) e derivada da fun cao (direita).
Logo (1.2) torna-se:
Achar u tal que
a(u, v) = (f, v)
I
v tal que v(0) = 0.
(1.3)
Precisamos denir onde u faz sentido!
Seja
V :=
v H
1
(0, 1) : v(0) = 0
.
Lembramos que
L
2
(0, 1) :=
v : (0, 1) R :
1
0
v
2
dx <
,
H
1
(0, 1) :=
v L
2
(0, 1) :
1
0
(v
)
2
dx <
.
Ent ao, o problema torna-se:
Achar u V tal que
a(u, v) = (f, v)
I
v V.
(1.4)
Observe que
(1.1) (1.4).
Lema 1.1. Seja f C
0
([0, 1]) e u C
2
([0, 1]) a solucao de (1.1). Entao (1.1)
(1.4).
Demonstracao. Observe que (1.1)(1.4). Agora, provemos que (1.4) (1.1). Seja
v V C
1
([0, 1]) V . Portanto temos u V satisfazendo
a(u, v) = (f, v)
I
.
1.1. EXEMPLO 1D: ELEMENTO LINEAR POR PARTES 9
Usando integrac ao por partes
(f, v)
I
= a(u, v)
=
1
0
u
dx
=
1
0
d
2
u
dx
2
v dx + u
(1)v(1) u
(0)v(0)
=
1
0
d
2
u
dx
2
v dx + u
(1)v(1). (1.5)
Selecione v V C
1
([0, 1]) tal que v(1) = 0, tal que
d
2
u
dx
2
f, v
I
= 0 v V C
1
([0, 1]).
Isso implica que (exerccio)
d
2
u
dx
2
= f em I.
Agora selecione v(x) = x V C
1
([0, 1]) e use-o em (1.5). Portanto
u
(1) = u
(1)v(1) +
d
2
u
dx
2
f, v
I
= 0,
e como u(0) = 0 pois u V , o resultado segue.
Observacao 1.2. As condicoes de contorno denominam-se
u(0) = 0 : condic ao de contorno essencial (ou Dirichlet)
u
(1) = 0 : condic ao de contorno natural (ou Neumann)
Observacao 1.3. O problema (1.4) corresponde ao princpio do trabalho virtual em
mec anica. Seja o funcional linear F : V R
F(v) =
1
2
a(v, v) (f, v)
I
.
Denimos o seguinte problema de minimizac ao:
Achar u V tal que
F(u) F(v) v V.
(1.6)
Esse problema corresponde ao princpio da energia potencial mnima em mecanica.
Podemos provar que
(1.6) (1.4).
Observacao 1.4. Se u C
2
([0, 1]), temos (1.1) (1.4) (1.6).
Observacao 1.5. Assumimos que quando v V o problema (1.4) tem soluc ao unica.
10 CAP
ITULO 1. CONCEITOS B
ASICOS
1.1.2 Metodo de Galerkin
Seja V
h
V um subespaco de dimens ao nita. O metodo de Galerkin consiste em:
Achar u
h
V
h
tal que
a(u
h
, v
h
) = (f, v
h
)
I
v
h
V
h
.
(1.7)
Observacao 1.6. Analogamente ao problema contnuo, podemos associar o metodo
de Galerkin a um problema de minimza cao:
Achar u
h
V
h
tal que
F(u
h
) F(v
h
), v
h
V
h
.
(1.8)
Seja {}
i{1,...,n}
uma base para V
h
. Logo
u
h
=
n
j=1
u
j
j
.
Como (1.7) e valido para todo v
h
V
h
, tomemos v
h
=
i
. Entao
a(u
h
, v
h
) = a(
n
j=1
u
j
j
,
i
)
=
n
j=1
a(
j
,
i
)u
j
.
Seja
K
ij
= a(
j
,
i
) e F
i
= (f,
i
)
I
.
Ent ao (1.7) e equivalente ao sistema linear
n
j=1
K
ij
u
j
= F
i
i {1,. . . ,n}.
De forma compacta,
K = [K
ij
], u = [u
j
], F = [F
i
],
(1.7) e equivalente ao sistema
K u = F.
Observacao 1.7. Como este sistema e nito e quadrado, unicidade e igual existencia.
Teorema 1.2. Seja f L
2
([0, 1]), entao o problema
Achar u R
n
tal que
K u = F,
(1.9)
tem solucao unica.
1.1. EXEMPLO 1D: ELEMENTO LINEAR POR PARTES 11
Demonstracao. Suponha v tal que
K v = 0.
Temos que provar que v = 0. Escreva v =
n
i=1
v
i
i
, logo
1
0
(v
)
2
dx = a(v, v)
=
0
n
i=1
a(v,
i
) v
i
= 0.
Ent ao, v
= 0 logo v = c R. Mas v(0) = 0, e portanto v = 0. Como {
i
} e uma
base,
0 = v =
n
i=1
v
i
i
v
i
= 0, i {1, . . . , n} v = 0.
Observacao 1.8. A matriz K e simetrica e positiva denida (chamada de matriz de
rigidez). De fato, seja v R
n
. Denindo v =
n
i=1
v
i
i
, temos
v
T
K v =
n
i,j=1
v
i
K
ij
v
j
= a(v, v)
=
1
0
(v
)
2
dx
0.
Quando
1
0
(v
)
2
dx = 0 v
= 0 v = c R. Como v(0) = 0 v = 0 v = 0.
Logo
v
T
K v > 0 v R
n
, v = 0.
1.1.3 Melhor Approximacao
Queremos mostrar que a func ao u
h
V
h
, soluc ao do metodo de Galerkin, e a que
aproxima melhor u V dentre todas as func oes v
h
V
h
.
Usando
a(u, v
h
) = (f, v
h
)
I
v
h
V
h
(do problema (1.4) e V
h
V )
a(u
h
, v
h
) = (f, v
h
)
I
v
h
V
h
(do problem (1.7)),
temos
a(u u
h
, v
h
) = 0 v
h
V
h
. (1.10)
12 CAP
ITULO 1. CONCEITOS B
ASICOS
V
u
u
h
V
h
Figura 1.2: Proje cao de uma func ao em V sobre V
h
usando a(., .).
Denicao 1.1. A func ao u u
h
V e chamada de erro de aproximacao.
Denicao 1.2. A func ao v
E
=
a(v, v), v V e chamada de norma da
energia. (Exerccio: Prove que .
E
e uma norma sobre V .)
O resultado seguinte, chamado de desigualdade de Cauchy-Schwarz, e uma relac ao
entre a(., .) e .
E
,
|a(w, v)| w
E
v
E
v, w V. (1.11)
De (1.10) e (1.11) temos, dado v
h
V
h
,
u u
h
2
E
= a(u u
h
, u u
h
)
= a(u u
h
, u v
h
) +
0
a(u u
h
, v
h
u
h
) (ortogonalidade)
= a(u u
h
, u v
h
)
u u
h
E
u v
h
E
. (Cauchy-Schwarz)
Se u u
h
E
= 0, logo
u u
h
E
u v
h
E
v
h
V
h
.
Este resultado e trivial se u u
h
E
= 0. Logo, provamos que
u u
h
E
inf
v
h
V
h
u v
h
E
.
Por outro lado, sendo u
h
V
h
, temos
inf
v
h
V
h
u v
h
E
u u
h
E
.
O espaco V
h
e de dimens ao nita, logo inf
v
h
V
h
u v
h
E
= min
v
h
V
h
u v
h
E
, e
temos o seguinte resultado.
Teorema 1.3. Seja u V a solucao do problema (1.4) e u
h
V
h
a solucao do
problema (1.7). Logo u
h
e a melhor aproximac ao no espa co V
h
, i.e.
u u
h
E
= min
v
h
V
h
u v
h
E
.
1.1. EXEMPLO 1D: ELEMENTO LINEAR POR PARTES 13
0 x
j
1
Figura 1.3: Exemplo de uma func ao linear por partes.
1.1.4 O Metodo de Elementos Finitos: Elemento Linear por
Partes
Falta escolher V
h
V para tornar o metodo de Galerkin efetivo. Portanto, cons-
truimos V
h
da seguinte forma: Seja a seguinte partic ao de [0, 1]
0 = x
0
< x
1
< < x
n
= 1,
e denimos I
j
= (x
j1
, x
j
), j {1, . . . , n}, h
j
= x
j
x
j1
e h = max
j{1,...,n}
h
j
.
Denicao 1.3. Denimos V
h
o espaco das func oes lineares v
h
tal que
v
h
C
0
([0, 1]),
v
h
|
I
j
e um polinomio linear, j {1, . . . , n},
v
h
(0) = 0.
Assumimos que V
h
V .
Denicao 1.4. Seja {
i
}
i{i,...,n}
V
h
as func oes denadas por
i
(x
j
) =
ij
=
1 i = j,
0 i = j,
(delta de Kronecker)
e assumimos que {
i
}
i{i,...,n}
e uma base para V
h
. Para i {1, . . . , n}, chamamos
x
i
e chamado de no,
14 CAP
ITULO 1. CONCEITOS B
ASICOS
1
0 x
j1
x
j
I
j
I
j+1
1
j
x
j+1
Figura 1.4: Func ao de base
j
.
i
e chamado de funcao de base nodal,
v
h
(x
i
) e chamado de valor nodal ou grau de liberdade.
Portanto, uma func ao v
h
V
h
possui a seguinte representa cao ( unica)
v
h
(x) =
n
i=1
v
i
i
(x),
onde
v
i
= v
h
(x
i
) (pois
i
(x
i
) = 1 e
i
(x
j
) = 0, i = j).
Observacao 1.9. O espaco V
h
tem dimensao n. .
Lembramos que associado ao metodo de Galerkin, existe o sistema linear
K v = F,
onde
K = [K
ij
] := a(
i
,
j
),
e simetrica e positiva denida.
Observacao 1.10. Gracas a escolha as func oes de base polinomiais por parte, a matriz
K e tridiagonal. De fato,
1
0
i
dx = a(
j
,
i
) = 0,
se |i j| > 1 (veja Fig. 1.5, 1.6, 1.7).
1.1. EXEMPLO 1D: ELEMENTO LINEAR POR PARTES 15
1
i
j
0 x
i
x
j
1
Figura 1.5: Exemplo de
i
e
j
com |i j| > 1.
i
j
1
x
i
x
j
1 0
Figura 1.6: Exemplo de
i
e
j
com |i j| = 1.
16 CAP
ITULO 1. CONCEITOS B
ASICOS
1
j
=
i
1 x
j
0
Figura 1.7: Exemplo de
i
=
j
.
Se h
j
= h, j {1, . . . , n}, temos (verique)
K =
1
h
_
_
2 1 0 0 0 0
1 2 1 0 0 0
0 1 2 0 0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 2 1 0
0 0 0 1 2 1
0 0 0 0 1 2
_
_
.
1.1.5 Interpolacao e estimativa de erro
Denicao 1.5. Dado v C
0
([0, 1]), a func ao interpolante Iv V
h
de v e denida
por
Iv(x) :=
n
i=1
v(x
i
)
i
(x).
Observacao 1.11. Se v V
h
ent ao Iv = v, pois (Iv v)|
I
j
e linear contnua e
(Iv v)(x
j1
) = (Iv v)(x
j
) = 0 (Iv v)|
I
j
= 0, j {1, . . . , n}. (Exerccio:
Use esse resultado para provar que {
i
}
i{1, ,n}
e uma base para V
h
.)
De modo geral temos a seguinte estimativa para o erro de interpolac ao (assu-
mido):
Lema 1.4. Seja v
L
2
(I)
:= (
1
0
|v|
2
)
1
2
. Logo
(i) v Iv
E
Ch
d
2
u
dx
2
L
2
(I)
,
1.1. EXEMPLO 1D: ELEMENTO LINEAR POR PARTES 17
$0$
$1$
u
h
u
Figura 1.8: Interpolac ao da func ao u por uma func ao linear por partes u
h
.
(ii) max
x[0,1]
|u(x) Iu(x)| Ch
2
max
x[0,1]
|
d
2
u(x)
dx
2
|,
onde C e independente de h e u.
Como Iu V
h
e temos a estimativa para u Iu gracas ao Lema 1.4, podemos
us a-la para estimar o erro u u
h
. De fato, do Teorema 1.3 temos
u u
h
E
= min
v
h
V
h
u v
h
E
u Iu
E
Ch
d
2
u
dx
2
L
2
(I)
.
Portanto, provamos a seguinte estimativa de erro:
Teorema 1.5. Seja u V H
2
(I) a solucao exata de (1.4), e u
h
V
h
a solucao
do metodo de Galerkin (1.7). Logo, temos que
u u
h
E
Ch
d
2
u
dx
2
L
2
(I)
,
onde C > 0 e uma constante independente de u e h.
Lembre que u u
h
E
= (
1
0
[(u u
h
)
]
2
)
1
2
. O que podemos dizer sobre |u(x)
u
h
(x)|?
Denicao 1.6. Seja g
x
(t) uma fun cao, chamada de funcao de Green, denida por
g
x
(t) =
t, t < x,
x, sen ao,
onde x [0, 1].
18 CAP
ITULO 1. CONCEITOS B
ASICOS
x
gx(t)
x 1
1
g
x
(t)
+
x 1
Figura 1.9: Func ao de Green (esquerda) e derivada da fun cao de Green (direita).
Observe que, dado v V , temos
a(v, g
x
) =
1
0
v
x
=
x
0
v
d
2
g
dx
2
dx
1
x
v
d
2
g
dx
2
dx + v(x)g
x
(x)|
+
0
v(0)g
x
(0) + v(1)
0
g
x
(1) v(x)g
x
(x)|
= v(x)
1
g
x
(x)
= v(x)
Portanto, escolhendo v = u u
h
acima, temos
(u u
h
)(x) = a(u u
h
, g
x
), x [0, 1].
Em seguida, escolhendo x = x
i
(os nos), temos que
(u u
h
)(x) = a(u u
h
, g
x
i
) (1.12)
= 0, (ortogonalidade)
pois g
x
i
V
h
. Logo (1.12) e equivalente, pela Denicao 1.5,
u
h
Iu ! (1.13)
Logo, usando o Lema 1.4 item (ii), temos a seguinte estimativa de erro pontual.
Teorema 1.6. Seja u V H
2
(I) a solucao exata de (1.4) e u
h
a solucao de (1.7).
Logo, temos que
max
x[0,1]
|u(x) u
h
(x)| Ch
2
max
x[0,1]
|
d
2
u(x)
dx
2
.
Demonstracao. Seja x [0, 1]. Logo,
|u(x) u
h
(x)| |u(x) Iu(x)| +
0
|Iu(x) u
h
(x)| (Eq. (1.13))
max
x[0,1]
|u(x) Iu(x)|
Ch
2
max
x[0,1]
|
d
2
u
dx
2
|.
1.2. EXEMPLO 2D: ELEMENTO LINEAR POR PARTES 19
1.2 Exemplo 2D: Elemento Linear por Partes
1.2.1 Forma Fraca
Suponha R
2
um aberto com fronteira poligonal , f e uma func ao dada
regular e
u :=
2
u
x
2
+
2
u
y
2
.
Considere o seguinte problema:
_
_
_
Achar u tal que
u = f, em ,
u = 0, em .
(1.14)
Observacao 1.12. Denotamos o gradiente de v por v, e lembramos que a formula
de Green se escreve
v wdx +
v wdx =
v
n
wds,
onde v, w s ao func oes sucientemente regulares, e
v
n
:= v n e a derivada
normal.
Denimos,
V := {v H
1
() : v|
= 0} C
0
(
), (1.15)
e logo a forma fraca de (1.14) e dada por:
Achar u V tal que
a(u, v) = (f, v)
, v V,
(1.16)
onde
a(u, v) :=
u v dx (f, v)
:=
f v dx.
De fato, multiplicando a equac ao (1.14) por v, integrando sobre , e usando a
f ormula de Green obtemos
(f, v)
:=
f v dx
=
u v dx
=
u v dx
0
u
n
v ds (v|
= 0)
=
u v dx
= a(u, v).
20 CAP
ITULO 1. CONCEITOS B
ASICOS
Analogamente ao exemplo 1D, existe um problema de minimizac ao equivalente
a (1.14) dado por:
Achar u V tal que
F(u) F(v), v V,
(1.17)
onde
F(v) :=
1
2
a(v, v) (f, v)
.
Ex. 1 Suponha u C
2
(). Prove que (1.14) (1.16).
1.2.2 Metodo de Galerkin
Seja V
h
V um subespaco de dimens ao nita. O metodo de Galerkin corresponde
a:
Achar u
h
V
h
tal que,
a(u
h
, v
h
) = (f, v
h
)
, v
h
V
h
.
(1.18)
Seja {
i
}
i{1,...,n}
uma base para V
h
.
Ex. 2 Mostrar que (1.18) K v = F onde para i, j {1, . . . , n},
K = [K
ij
] := a(
i
,
j
),
F = [F
i
] := (f,
i
)
,
v = [v
i
],
e que a matriz K e simetrica e positiva denida. Finalmente, provar que o sistema
linear tem uma soluc ao unica.
1.2.3 Melhor Aproximacao
Seja u V a soluc ao de (1.16) e u
h
V
h
a solucao de (1.18). Temos que,
u u
h
E
= min
v
h
V
h
u v
h
E
. (1.19)
Ex. 3 Verique (1.19) usando o mesmo procedimento do case 1D onde agora.
v
E
:=
a(v, v) =
|v|
2
dx
1
2
.
1.2. EXEMPLO 2D: ELEMENTO LINEAR POR PARTES 21
K
K2
K1
Figura 1.10: Triangulariza cao conforme (esquerda) e n ao conforme (direita).
1.2.4 Metodo de Elementos Finitos Lineares por Partes
Lembramos que R
2
e um aberto com fronteira poligonal.
Denicao 1.7. Uma partic ao (ou malha) de em elementos K, e denotada por
T
h
, e chamada de conforme se
=
KT
h
K,
e tal que K
1
K
2
= , um n o, ou uma aresta, onde K
1
, K
2
T
h
.
Seja h
K
:= diam(K) = maior lado de K e h := max
KT
h
h
K
.
Denicao 1.8. Seja V
h
o espaco das func oes
(i) v
h
C
0
(
);
(ii) v
h
|
K
e um polinomio linear, K T
h
;
(iii) v
h
|
= 0.
Observacao 1.13. Podemos re-escrever (i)-(iii) da denicao 1.8 de forma compacta
como
V
h
= {v
h
C
0
(
) : v
h
|
K
P
1
(K) e v|
= 0},
e podemos provar que (assumido neste momento)
V
h
V.
Denotamos por P
1
(K) o espa co dos polinomios por partes de ordem 1.
Denicao 1.9. Seja {
i
}
i{1,...,n}
V
h
as func oes denidas por
i
(x
j
) =
ij
=
1 i = j,
0 i = j,
onde i, j {1, . . . , n}. Chamamos de
22 CAP
ITULO 1. CONCEITOS B
ASICOS
j
x
j
Figura 1.11: Uma fun cao de base linear
j
.
x
i
os nos da malha;
i
as funcoes de base nodais (assumido neste momento);
v
h
(x
j
) grau de liberdade.
Portanto, dado v
h
V
h
v
h
(x) =
n
i=1
v
i
i
(x),
onde v
i
= v
h
(x
i
).
Observacao 1.14. O espaco V
h
tem dimens ao n, mas o numero de graus de liberdade
desconhecidos e n menos o n umero de n os no contorno .
Lembre que associado a (1.18) temos
K u = F,
onde
K = [K
ij
] := a(
i
,
j
),
F = [F
i
] := (f,
i
)
,
u = [u
i
].
Uma vez calculado u R
n
, a solu cao aproximada e dada por
u
h
(x) =
n
i=1
u
i
i
(x), x .
1.2. EXEMPLO 2D: ELEMENTO LINEAR POR PARTES 23
i
Figura 1.12: Nos associados as
j
com a propriedade a(
i
,
j
) = 0.
Observacao 1.15. Observe que a numericac ao dos n os da malha impacta a forma da
matriz K!
1.2.5 Interpolacao e estimativa de erro
Denicao 1.10. O operador de interpolac ao I : C
0
(
) V
h
e denido como,
Iv(x) :=
n
i=1
v(x
i
)
i
(x),
1 2 3 4 5
1
3 1 2 4 5
1
Figura 1.13: Numerac ao onde a(
3
,
4
) = 0 e onde a(
3
,
4
) = 0 (direita).
24 CAP
ITULO 1. CONCEITOS B
ASICOS
onde v C
0
(
).
Ex. 4 Rever demonstrac ao, se v
h
V
h
ent ao Iv
h
= v
h
.
Observacao 1.16. {
i
}
i{1,...,n}
e uma base para V
h
.
De fato, seja v
h
V
h
, entao
v
h
= Iv
h
=
n
i=1
v
h
(x
i
)
i
,
logo qualquer func ao de V
h
pode ser representado por uma combina cao {
i
}
i{1,...,n}
.
Agora, suponha
n
i=1
v
h
(x
i
)
i
(x) = 0, x .
Logo, tomando x = x
i
acima, temos
0 =
n
i=1
v
h
(x
i
)
i
(x
i
)
= v
h
(x
i
).
Portanto, fazendo variar i = 1, . . . , n v
h
(x
i
) = 0, i {1, . . . , n}, e o resultado
segue.
Assuma o seguinte erro de interpolac ao
Lema 1.7. Seja v H
2
() H
1
0
(). Logo,
v Iv
E
Chu
L
2
()
,
onde C > 0 e uma constante independente de h e u.
Usando o Lema 1.7, estimamos o erro entre u e u
h
, soluc oes de (1.16) e (1.18)
respectivamente, por
u u
h
E
= min
v
h
V
h
u v
h
E
u Iu
E
Chu
L
2
()
.
Apresentamos o resultado formalmente no seguinte teorema:
Teorema 1.8. Seja u V H
2
() a solucao exata de (1.16), e u
h
V
h
a solucao
de (1.18). Entao,
u u
h
E
Chu
L
2
()
,
onde C > 0 e uma constante independente de u e h.
Captulo 2
Formulacao Contnua
2.1 Formulacao Variacional de uma EDP
Suponha R
n
, n {1, 2, 3}, um aberto limitado com contorno poligonal .
Vamos considerar o problema abstrato,
Achar u V tal que
a(u, v) = L(v), v V.
(2.1)
Um problema como (2.1) e dito bem posto se
1. existe uma soluc ao,
2. a soluc ao e unica,
3. a soluc ao depende continuamente dos dados.
O seguinte teorema nos propociona condi coes sucientes para o problema (2.1) ser
bem posto.
Lema 2.1 (Lax-Milgram). Seja (V, (., .)
V
) um espaco de Hilbert. Seja a(., .) uma
forma bilinear contnua e coerciva sobre V V , e L(.) uma forma linear contnua
sobre V . Entao, existe uma unica u V tal que
a(u, v) = L(v), v V,
e que satisfaz
u
V
L
V
,
onde e a constante de coercividade.
Note que a estimativa
u
V
L
V
,
implica que u depende continuamente dos dados. Precisamos denir o sentido dos
conceitos incluidos na denicao do problema (2.1) e no Lema 2.1.
25
26 CAP
ITULO 2. FORMULAC
AO CONT
INUA
2.1.1 Formas e operadores
Denicao 2.1. Seja V um espaco vetorial. Uma forma linear L : V R e um
operador linear se e somente se
L(v + w) = L(v) + L(w),
onde , R e v, w V, V .
Denicao 2.2. Uma forma bilinear a : V V R e um operador linear em cada
argumento, isto e,
a(v + w, z) = a(v, z) + a(w, z),
a(v, w + z) = a(v, w) + a(v, z),
onde , R e v, w, z V .
Dizemos que:
L : V R e contnua se existe C
L
> 0 tal que
|L(v)| C
L
v
V
, v V ;
a : V V R e contnua se existe C
a
> 0 tal que
|a(u, v)| C
a
u
V
v
V
, u, v V ;
a : V V R e simetrica, isto e,
a(u, v) = a(v, u), u, v V ;
a : V V R e coerciva se existe > 0 tal que
a(v, v) v
2
V
, v V.
Denicao 2.3. O espaco de todas as formas lineares contnuas sobre V e chamado
de espaco dual de V , e denotado por V
. Denimos a seguinte norma
L
V
:= sup
vV, v=0
|L(v)|
v
V
.
Ex. 5 Prove que .
V
denido na Denicao 2.3 e uma norma.
2.1. FORMULAC
AO VARIACIONAL DE UMA EDP 27
Formulacao equivalente do problema (2.1)
Denotamos, para u V dado,
Au(v) := a(u, v).
Observe que Au : V R e linear.
Observacao 2.1. Notac ao alternativa: Au, v
V
,V
:= a(u, v).
Ent ao reescrevemos o problema (2.1) como
Achar u V tal que
Au(v) = L(v), v V.
(2.2)
Assumimos neste momento que Au e contnua, isto e, Au V
. Logo, (AuL)(v) =
0, v V , isto e, a formulacao (2.2) do problema (2.1) reescreve-se como
Achar u V tal que
Au = L, em V
.
(2.3)
Podemos interpretar o problema (2.3) da mesma forma que interpretamos a resoluc ao
de um sistema linear. De fato, A pode ser vista como um operador linear
A : V
u
V
Au
,
sobre um vetor u V . Porem neste caso os espa cos s ao de dimens ao innita.
Portanto, provar a existencia de solucao para (2.1) e equivalente a provar que
dado L V
arbitr aria, existe u V tal que Au = L. Isto signica que A e
sobrejectiva! A unicidade de soluc ao para o problema (2.1) consiste em provar que
A e tambem injetiva sobre V , isto e,
Av = 0 v = 0, v V.
O Lema de Lax-Milgram 2.1 nos fornece as condicoes sucientes sobre a(., .) e L(.)
para existencia e unicidade de soluc ao para (2.1). Vamos ver que as condic oes sobre
a s ao tambem condic oes sobre A tal que o problema (2.3) tem solucao unica. Temos
a norma
A = sup
wV, w=0
Aw
V
w
V
. (2.4)
Ex. 6 Prove que: se a(u, v) e bilinear e contnua sobre V ent ao a forma Au e
linear e contnua sobre V . Logo Au V
.
Ex. 7 Prove que: se a(u, v) e bilinear e contnua sobre V ent ao o operador A
e linear sobre V , e A C
a
, onde C
a
e a constante de continuidade para a(., .).
28 CAP
ITULO 2. FORMULAC
AO CONT
INUA
2.1.2 Espacos de Hilbert
Denicao 2.4. Seja V um espaco vetorial sobre R. Um produto interno e uma
aplicac ao (., .)
V
: V V R tal que
1. (v, v)
V
0 e (v, v)
V
= 0 v = 0;
2. (v, w + z)
V
= (v, w)
V
+ (v, z)
V
, , R;
3. (v, w)
V
= (w, v)
V
, w, v, z V .
Lema 2.2 (Desigualidade de Cauchy-Schwarz). Seja V um espaco vetorial munido
de (., .)
V
. Logo,
|(u, v)
V
| u
V
v
V
, u, v V.
Observacao 2.2. Verique que v
V
:=
(v, v)
V
e uma norma sobre V .
Observacao 2.3. Seja V um espaco vetorial munido de um produto interno (., .)
V
.
Ent ao V e um espaco vetorial normado com norma .
V
:=
(., .)
V
.
Denicao 2.5 (Espaco de Hilbert). Seja V um espaco linear e suponha
(i) V e equipado de um produto interno (., .)
V
;
(ii) Toda sequencia de Cauchy em V converge em V na norma .
V
. O espaco V
e dito completo (relembre o que e uma sequencia de Cauchy).
O espaco (V, (., .)
V
) e chamado espaco de Hilbert.
A denic ao do espa co de Hilbert e composto de um espaco vetorial e um produto
interno. Quando o produto interno est a claramente denido pelo contexto, vamos
utilizar a nota cao V ao inves de de (V, (., .)
V
).
Exemplo 2.1.
(i) O espaco V := C
0
([0, 1]) com o produto interno
(v, w)
V
:=
1
0
v wdx R,
n ao e completo: existe uma sequencia {u
n
}
nN
tal que u
n
u
V
0, mas
u / C
0
([0, 1])! (veja Figura 2.1) Logo, V n ao e um espaco de Hilbert.
(ii) O espaco V := R e um espaco de Hilbert munido do produto interno
(u, v)
V
:= uv, u, v R.
A norma u
V
=
u
2
= |u|. O espaco V := R
n
munido com produto interno
e um espaco de Hilbert.
(iii) Todo vetorial espaco (V, (., .)
V
) de dimens ao nita e um espa co de Hilbert.
2.1. FORMULAC
AO VARIACIONAL DE UMA EDP 29
un 1
1
2
1
2
1
n
1
u
1
1
2
1
Figura 2.1: Exemplo de uma sequencia em C
0
(
) (esquerda) que n ao tem limite
(direita) em C
0
(
).
(iv) O espaco V := L
2
() onde
L
2
() := {v : R :
|v|
2
dx < },
e um espaco de Hilbert munido do produto interno
(u, v)
V
= (u, v)
:=
u v dx, u, v V.
(v) Os espacos V := H
k
() onde, k {0, 1, 2, . . . }
H
k
() := {v L
2
() :
||k
(D
u)
2
dx < },
s ao espacos de Hilbert com
(u, v)
V
:=
||k
(D
u, D
v)
V
,
D
operador diferencial de ordem || e || =
d
i=1
i
. Denotamos a norma
induzida por
v
V
:=
(v, v)
V
.
(vi) Os espacos V := H
k
0
() onde, k {0, 1, 2, . . . }
H
k
0
() := {v H
k
() : v|
= 0},
s ao espacos de Hilbert com o mesmo produto interno de H
k
().
30 CAP
ITULO 2. FORMULAC
AO CONT
INUA
Observacao 2.4. Uma semi-norma no espaco H
k
() e denida por
|v|
V
:=
_
_
||=k
(D
v, D
v)
V
_
_
1
2
, v H
k
().
Observe que |v|
V
= 0 v = 0!
A semi-norma no espaco H
1
0
() e uma norma, e denotamos
v
H
1
0
()
= |v|
H
1
()
= v
L
2
()
.
Este resultado e uma consequencia da desigualidade de Poincare:
Lema 2.3 (Desigualidade de Poincare). Seja um aberto limitado. Existe C
> 0
tal que
v
L
2
()
C
v
L
2
()
, v H
1
0
().
Subespacos
Denicao 2.6. Seja (V, (., .)
V
) um espaco de Hilbert. Dizemos que M V e um
sub-espaco de V se M e fechado.
Se M e um sub-espa co de um espaco de Hilbert (V, (., .)
V
), ent ao (M, (., .)
V
)
e um espa co de Hilbert porque M fechado implica M ser completo. O seguinte
teorema (assumido) usa esse fato fara decompor V em sub-espacos.
Lema 2.4. Seja M um sub-espaco de um espaco de Hilbert (V, (., .)
V
) entao
V = M M
,
onde
M
:= {v V : (v, w)
V
= 0, w M},
e um sub-espaco de V .
De acordo com Lema 2.4, dado v V , v decompoe-se univocamente como
v = v
M
+ v
M
,
onde v
M
M e v
M
:= v v
M
M
. Veja Figura 2.2.
Lema 2.5. Seja (V, (., .)
V
) um espaco de Hilbert, e suponha a(., .) uma forma
bilinear simetrica contnua em V , e coerciva em um sub-espaco M de V . Logo,
1. (M, a(., .)) e um espaco de Hilbert;
2. C
1
v
V
v
E
C
2
v
V
, v M, C
1
, C
2
> 0.
Ex. 8 Prove o lema anterior. Dicas:
Prove que a(., .) e um produto interno sobre M.
Toda sequencia de Cauchy converge em M na norma .
E
=
a(., .).
2.1. FORMULAC
AO VARIACIONAL DE UMA EDP 31
V v
v
M
M
v
M
= v v
M
Figura 2.2: Projec ao de um vetor v V sobre o subespaco M.
2.1.3 Representac oes das Formas Lineares Continuas
Observe que dado u V , existe uma forma linear L
u
denida por
L
u
(v) := (u, v)
V
, v V,
e contnua, isto e, L
u
V
. Do seguinte teorema, dado L V
, existe u V tal que
L(v) = (u, v)
V
, v V.
Teorema 2.6 (Teorema da Representacao de Riesz). Seja L V
, onde V
e o
espaco dual do espaco de Hilbert (V, (., .)
V
). Entao existe um unico u V tal que
L(v) = (u, v)
V
, v V.
Alem disso,
L
V
= u
V
.
Demonstracao. Provamos o resultado em tres passos: i) existencia de u V , ii)
unicidade de u V , e nalmente iii) L
V
= u
V
.
(i) existencia:
Seja M o seguinte sub-espaco de V
M := {v V : L(v) = 0}.
Portanto,
V = M M
.
Caso M
= {0}. Entao neste caso M = V , e logo L(v) = 0, v V . Tome
u = 0!
32 CAP
ITULO 2. FORMULAC
AO CONT
INUA
Caso M
= {0}. Tome z M
, z = 0. Ent ao L(z) = 0. Dado v V e
=
L(v)
L(z)
, obtemos
L(v z) = L(v) L(z)
= 0,
logo v z M.
Portanto, escrevendo v
M
= v z, temos z = v
M
. Em particular, se
v M
ent ao v = z o que mostra que M
tem dimensao 1. Tome
u :=
L(z)
z
2
V
z,
ent ao u M
. Temos:
(u, v)
V
= (u, (v z)
V
+ z)
V
= (u,
0
v z)
V
+ (u, z)
V
= (u, z)
V
(u M
, e v z M)
=
L(z)
z
2
V
(z, z)
V
(Denic ao de u)
= L(z) (Denic ao de )
= L(v).
(ii) unicidade:
Sejam u
1
, u
2
V tais que
L(v) = (u
1
, v)
V
e L(v) = (u
2
, v)
V
.
Logo, tomando v = u
1
u
2
V ,
0 = L(u
1
u
2
) L(u
1
u
2
)
= (u
1
, u
1
u
2
)
V
(u
2
, u
1
u
2
)
V
= u
1
u
2
2
V
,
isto e, u
1
u
2
= 0 u
1
= u
2
.
(iii) L
V
= u
V
Observe que
u
V
=
L(z)z
V
z
2
V
= |L(z)|
z
V
z
2
V
=
|L(z)|
z
V
sup
zV, z=0
|L(z)|
z
V
= L
V
.
2.2. EXIST
ENCIA E UNICIDADE 33
Por outro lado,
L
V
= sup
vV, v=0
|L(v)|
v
V
= sup
vV, v=0
|(u, v)
V
|
v
V
sup
vV, v=0
u
V
v
V
v
V
(Cauchy-Schwarz)
= u
V
.
Portanto, L
V
= u
V
.
Denicao 2.7. Seja (V, (., .)
V
) um espaco de Hilbert. Denimos um mapeamento
dual sobre V ,
J : V
u
V
Ju
,
atraves de
Ju := L
u
,
onde L
u
e a forma linear contnua associada a u V , isto e,
L
u
(v) = Ju, v
V
,V
ac ao de Ju sobre v
:= (u, v)
V
, u, v V.
Observacao 2.5. Pelo teorema da representa cao de Riesz o mapeamento J e bijetivo,
contnuo e preserva a norma. Isto e,
Ju
V
= u
V
.
Ex. 9 Mostre que J : V V
denido acima e um mapeamento contnuo sobre
V .
2.2 Existencia e Unicidade
O Teorema de Riesz esta na base da demonstracao do Lema de Lax-Milgram. Con-
sidere a formulac ao (2.2) do problema (2.1) e observe que pelo teorema do represen-
tatc ao de Riesz, existe Au V e L V tais que
(Au, v)
V
= Au(v), v V,
(L, v)
V
= L(v), v V,
onde Au
V
= Au
V
e L
V
= L
V
(note : V
V e igual a J
1
).
Portanto, o problema (2.1) e equivalente ao problema (2.2) e reescriva-se:
Achar u V tal que
(Au, v)
V
= (L, v)
V
, v V,
(2.5)
34 CAP
ITULO 2. FORMULAC
AO CONT
INUA
isto e, dado L V
Achar u V tal que
Au = L, em V.
(2.6)
O problema (2.5) e equivalente ao problema (2.1), mas e uma formulacao mais
adequada para a demonstac ao. Supondo a : V V R e contnua, observe que o
operador A : V V tem a propriedade
A C
a
, (2.7)
onde C
a
e a constante de continuidade de a(., .) (a denic ao de . e dada em (2.4)).
Lema 2.7 (Lax-Milgram). Seja (V, (., .)
V
) um espaco de Hilbert. Seja a(., .) uma
forma bilinear contnua e coerciva sobre V V , e L(.) uma forma linear contnua
sobre V . Entao, existe uma unica u V tal que
a(u, v) = L(v), v V,
e que satisfaz
u
V
L
V
,
onde e a constante de coercividade.
Demonstracao.
(i) Existencia
Os passos usados para provar existencia no caso simetrico s ao uteis para o caso
geral, ent ao provamos este caso antes do caso mais geral.
1. Caso a(., .) simetrico.
Veja que (V, a(., .)) e um espaco de Hilbert (Lema 2.5). Temos que a(., .)
e contnua e coerciva sobre V , logo .
V
e .
E
s ao equivalentes (Lema
2.5). A forma L(v) tambem e contnua sobre V com relac ao a .
E
, i.e.,
|L(v)| C
L
v
V
C
L
C
1
v
E
.
Portanto, pelo teorema da representa cao de Riesz, existe um unico u V
tal que
L(v) = a(u, v), v V.
2. Caso a(., .) nao simetrico.
Vamos usar o problema (2.5), que e equivalente ao problema (2.1). Pela
hip otese de coercividade sobre V , dado v V ,
v
2
V
a(v, v)
= Av(v)
= (Av, v)
V
(Teorema da representa cao de Riesz)
Av
V
v
V
, (Cauchy-Schwarz)
2.2. EXIST
ENCIA E UNICIDADE 35
onde > 0, e Av V . Logo,
v
V
Av
V
, v V. (2.8)
Portanto Im(A) := {w V : w = Av, v V } e um sub-espaco de V
(Exerccio; Dica: usando as equac oes (2.8) e (2.7), mostre que Im(A) e
fechado.), logo (Im(A), (., .)
V
) e um espaco de Hilbert. Logo,
V = Im(A) Im(A)
.
Seja w Im(A)
, portanto pela coercividade sobre V , temos
w
2
V
a(w, w)
= Aw(w) (ou Aw, w
V
V
)
= (Aw, w)
V
= 0 (Aw Im(A) e w Im(A)
)
logo w = 0 e Im(A)
= {0}. Entao, V = Im(A), e A e sobrejetiva,
isto e, dado L V , existe u V tal que
Au = L.
(ii) Estabilidade e unicidade
Tome v = u em (2.1). Pela coercividade de a(., .) e continuidade de L(.) sobre
V temos
u
2
V
1
a(u, u)
=
1
L(u),
logo
u
V
1
L(u)
u
V
|L(u)|
u
V
sup
vV
|L(v)|
v
V
=
1
L
V
.
Suponha u
1
e u
2
soluc oes de (2.1). Portanto pela coercividade de a(., .) sobre
V , com v = u
1
u
2
, temos
u
1
u
2
2
V
a(u
1
u
2
, u
1
u
2
)
= L(u
1
u
2
) L(u
1
u
2
)
= 0.
Logo u
1
u
2
V
= 0 u
1
= u
2
36 CAP
ITULO 2. FORMULAC
AO CONT
INUA
Seja o problema de minimizac ao
Achar u V tal que
F(u) F(v), v V,
(2.9)
onde F(v) :=
1
2
a(v, v) L(v).
Teorema 2.8. Seja V um espaco de Hilbert. Seja a : V V R uma forma
bilinear simetrica, contnua e coerciva sobre V . Seja L : V R uma forma linear
contnua sobre V . Logo,
(2.1) (2.9),
e (2.9) tem solucao unica.
Demonstracao. Lembramos que, existem constantes C
1
, C
2
> 0 tal que
C
1
v
2
V
a(v, v) C
2
v
2
V
, v V.
Seja u, v V e denimos
(t) := F(u + tv), t R.
Usando a condi cao de simetria de a(., .) temos
(t) =
t
2
2
a(v, v) + t [a(u, v) L(v)] +
1
2
a(u, u) L(u), (2.10)
logo,
(t) = ta(v, v) + [a(u, v) L(v)] .
A coercividade de a(., .) implica
a(v, v) v
2
V
, 0 = v V, > 0.
Logo, (2.10) tem um mnimo se e somente e
(0) = 0, 0 = v V.
Seja u soluc ao de (2.1), logo
a(u, v) = L(v) v V
(t) = ta(v, v)
(0) = 0
u e o mmimo de (2.9).
Seja u V o mnimo de (2.9). Logo,
(0) = 0 a(u, v) = L(v), 0 = v V .
Logo, u e solu cao de (2.1). A existencia e unicidade de (2.9) segue da existencia e
unicidade de (2.1).
2.3. EXEMPLOS DE FORMULAC
OES VARIACIONAIS 37
2.3 Exemplos de Formulac oes Variacionais
2.3.1 Equacao de Laplace Homogenea
Considere o problema
_
_
_
Achar u tal que
u = f em ,
u = 0 em .
(2.11)
Suponha f L
2
() e denimos
a(u, v) :=
u v dx
L(v) :=
f v dx.
Denimos V := H
1
0
() munido do produto interno (u, v)
H
1
0
()
:=
u v dx. A
formula cao variacional do problema (2.11) consiste em
Achar u V tal que
a(u, v) = L(v), v V.
(2.12)
Note que a forma bilinear a(., .) e simetrica, isto e,
a(u, v) = (u, v)
H
1
0
()
= (v, u)
H
1
0
()
= a(v, u).
Vamos vericar para o problema (2.12) as hipoteses do Lema de Lax-Milgram:
(i) (V, (., .)
V
) = (H
1
0
(), (., .)
H
1
0
()
) e um espaco de Hilbert pois (., .)
H
1
0
()
e um
produto interno e H
1
0
() e completo na norma u
H
1
0
()
=
(v, v)
H
1
0
()
.
(ii) A forma linear L(.) e contnua,
|L(v)| = |(f, v)
L
2
()
| (Cauchy-Schwarz)
f
L
2
()
v
L
2
()
= C
f
v
L
2
()
(Poincare)
C
C
f
v
H
1
0
()
, v V.
(iii) A forma bilinear a(., .) e contnua,
|a(u, v)| = |(u, v)
H
1
0
()
|
u
H
1
0
()
v
H
1
0
()
. (Cauchy-Schwarz)
(iv) A forma bilinear a(., .) e coerciva,
a(v, v) = (v, v)
H
1
0
()
= v
2
H
1
0
()
. ( = |v|
H
1
()
= v
L
2
()
)
38 CAP
ITULO 2. FORMULAC
AO CONT
INUA
Portanto existe uma unica u V soluc ao do problema (2.12) e
u
H
1
0
()
L
(H
1
0
())
(2.13)
= sup
vV, v=0
|L(v)|
v
H
1
0
()
(2.14)
= sup
vV, v=0
f
L
2
()
C
v
H
1
0
()
v
H
1
0
()
(2.15)
= C
f
L
2
()
(2.16)
Seja um domnio C
1
ou convexo. Se f L
2
() ent ao u H
2
() e existe C
tal
que
u
H
2
()
Cf
L
2
()
.
2.3.2 Equacao de Laplace Nao Homogenea
Considere o problema:
_
_
_
Achar u tal que
u = f em ,
u = g em ,
(2.17)
Seja R(g) uma fun cao sucientemente regular tal que R(g)|
= g. Denimos
u = u + R(g), onde u satisfaz o seguinte problema:
_
_
_
Achar u tal que
u = f +R(g) em ,
u = 0 em ,
(2.18)
A formulac ao variacional do problema (2.18) e
Achar u V tal que
a( u, v) = L(v), v V,
(2.19)
onde f L
2
(). Denimos
a(u, v) :=
u v dx
L(v) :=
f v dx
R(g) v dx.
Denimos a seguinte norma:
v
H
1
2 ()
:= inf
w|
=v
w
H
1
()
.
Temos que (assumido) sempre existe R(v) H
1
() tal que R(v)|
= v e R(v)
H
1
()
=
v
H
1
2 ()
. Vericamos as hip oteses do Lema Lax-Milgram. Note que a coercivi-
dade e a continuidade da forma bilinear a(., .) seguem da demonstrac ao dada na
2.3. EXEMPLOS DE FORMULAC
OES VARIACIONAIS 39
sec ao 2.3.1, usando-se os mesmos argumentos. Falta demonstramos a continuidade
de L(.):
|L(v)| = |(f, v)
L
2
()
(R(g), v)
H
1
0
()
|
f
L
2
()
v
L
2
()
+R(g)
L
2
()
v
L
2
()
C
f
L
2
()
v
L
2
()
+R(g)
H
1
0
()
v
L
2
()
C
f
L
2
()
+g
H
1
2 ()
v
H
1
0
()
= C
f,g
v
H
1
0
()
, v V.
Logo, existe um unico u V satisfazendo (2.19) e
u
H
1
0
()
sup
vV, v=0
|L(v)|
v
H
1
0
()
C
f
L
2
()
+g
H
1
2 ()
.
Agora, tome
u = u + R(g).
Logo,
u
H
1
()
u
H
1
0
()
+R(g)
H
1
()
C
f
L
2
()
+ 2g
H
1
2 ()
.
2.3.3 Equacao adveccao-difusao
Considere o problema:
_
_
_
Achar u tal que
u + b u = f em ,
u = 0 em ,
(2.20)
onde f L
2
() e b = b(x) C
1
() e |b(x)| C, x e tal que
b(x) = 0, x ,
onde e o operador divergente, isto e,
x = (x
1
, x
2
),
b = (b
1
, b
2
),
b =
b
1
x
1
+
b
2
x
2
.
Tomamos V := H
1
0
() com (u, v)
V
:= (u, v)
H
1
0
()
=
u v dx. A formulacao
variacional deste problema e
Achar u V tal que
a( u, v) = L(v), v V,
(2.21)
40 CAP
ITULO 2. FORMULAC
AO CONT
INUA
onde
a(u, v) :=
u v dx +
b u v dx
L(v) :=
f v dx.
Portanto a(., .) e n ao-simetrica.
J a vimos que o V e um espaco de Hilbert. Provamos as outras condic oes do
Lema de Lax-Milgram.
(i) A forma linear L(.) e contnua:
|L(v)| cv
V
, v V,
(ii) A forma bilinear a(., .) e contnua,
|a(u, v)| = |(u, v)
V
+ (b u, v)
L
2
()
|
|(u, v)
V
| + |(b u, v)
L
2
()
|
u
V
v
V
+b u
L
2
()
v
L
2
()
u
V
v
V
+ max
x
|b(x)u
L
2
()
v
L
2
()
u
V
v
V
+ CC
u
L
2
()
v
L
2
()
= (1 + CC
)u
V
v
V
(iii) A forma blinear a(., .) e coerciva:
a(v, v) = (v, v)
V
+ (b v, v)
L
2
()
= v
2
V
+ (b v, v)
L
2
()
.
Mas usando integracao por partes temos,
(b v, v)
L
2
()
= (v, b v)
L
2
()
+ (b nv, v)
L
2
()
(b v, v)
L
2
()
=
1
2
(b nv,
0
v)
L
2
()
= 0
Portanto, a(v, v) = v
2
V
, v V .
Pelo Lema de Lax-Milgram, existe um unico u H
1
0
() soluc ao de (2.21) e
u
H
1
0
()
C
f
L
2
()
.
Captulo 3
Formulacao Discreta
Dado L V
, consideramos aproximac oes do problema:
Achar u V tal que
a(u, v) = L(v), v V,
(3.1)
onde (V, (., .)
V
) e um espaco de Hilbert.
3.1 Metodo de Galerkin
O metodo de Galerkin consiste em utilizar um espaco de dimens ao nita para apro-
ximar o problema (3.1), isto e, dado V
h
V um sub-espaco de V e L V
Achar u
h
V
h
tal que
a(u
h
, v
h
) = L(v
h
), v
h
V
h
.
(3.2)
Quest oes:
1. Existe uma unica soluc ao para (3.2)?
2. Qual o erro u u
h
?
Corolario 3.1. Suponha que as condicoes do Lema de Lax-Milgram sejam satisfeitas
pelo problema (3.1). Entao o problema (3.2) tem solucao unica.
Demonstracao. Como V
h
e um sub-espaco de V , entao V
h
e um espaco de Hilbert.
Alem disso L(.)|
V
h
V
h
e a(., .)|
V
h
e contnua e coerciva (com a mesma constante
!). Portanto, aplica-se o Lema de Lax-Milgram e o resultado segue.
41
42 CAP
ITULO 3. FORMULAC
AO DISCRETA
3.2 Melhor Aproximacao: Lema de Cea
Lema 3.2 (Lema de Cea). Suponha validas as hipoteses do Lema de Lax-Milgram.
Seja u
h
a solucao de (3.2), e u a solucao de (3.1), logo,
u u
h
V
C
a
min
v
h
V
h
u v
h
V
.
Se a(., .) for simetrica, entao
u u
h
C
a
min
v
h
V
h
u v
h
V
.
Demonstracao. Lembrar: Se a(., .) for simetrica, entao a(., .) e um produto interno,
e u u
h
E
= min
v
h
V
h
u v
h
E
.
Como u
h
e soluc ao de (3.2), ent ao
a(u
h
, v
h
) = L(v
h
), v
h
V
h
.
e como u e soluc ao de (3.1), logo
a(u, v
h
) = L(v
h
), v
h
V
h
.
Portanto,
a(u u
h
, v
h
) = 0, v
h
V
h
. (3.3)
Pela coercividade e continuidade de a(., .) sobre V , temos
u u
h
2
V
a(u u
h
, u u
h
) (coercividade)
=
0
a(u u
h
, v
h
u
h
) + a(u u
h
, u v
h
) (equac ao (3.3))
= a(u u
h
, u v
h
)
C
a
u u
h
V
u v
h
V
, (continuidade)
logo
u u
h
V
C
a
u v
h
V
, v
h
V
h
u u
h
V
C
a
min
v
h
V
h
u v
h
V
.
Provamos que, quando a(., .) e simetrica, temos
u u
h
E
= min
v
h
V
h
u v
h
E
,
e a equivalencia de normas, segue
1
2
v
V
v
E
C
1
2
a
v
V
, v V.
3.2. MELHOR APROXIMAC
AO: LEMA DE C
EA 43
Portanto, tomando acima temos v = u u
h
,
u u
h
V
1
u u
h
E
=
1
min
v
h
V
h
u v
h
C
a
min
v
h
V
h
u v
h
V
.
Ex. 10 Seja o sistema linear associado a (3.2)
Au = F.
Verique que se a(., .) e simetrica e coerciva sobre V
h
, entao Ae uma matriz simetrica
e denida positiva.
Observacao 3.1. Repare que as constantes de continuidade e coercividade impactam
a precisao do erro de aproximac ao.
44 CAP
ITULO 3. FORMULAC
AO DISCRETA
Captulo 4
Metodo de Elementos Finitos
Objetivo: Contruir um espaco de dimens ao nita V
h
, de forma que,
1. O c alculo das entradas da matriz A e do vetor F seja simples e r apido,
2. O sistema linear Au = F seja calculado rapidamente e com baixo custo quando
h 0.
O candidato natural e utilizar funcoes polinomias por partes (localidade) por
simplicidade de integrac ao,
matrizes esparsas e bem condicionadas.
Para tanto, o dominio e decomposto (discretizado) em uma particao T
h
cha-
mada de malha, de forma que V
h
seja gerado por polinomios por partes em cada
elementos K T
h
.
Estrategia:
1. Denir o conceito de elemento nito em cada K, i.e., determinar as func oes
de base sobre K.
2. Estender o conceito de elemento nito globalmente, i.e., denir as funcoes de
base globais de forma que coincidam com as func oes de base locais quando
restrita a K, e casem adequadamente no contorno de K.
Vamos denir um elemento nito na forma proposta por Ciarlet.
Denicao 4.1 (Elemento Finito). Seja:
(i) K R
n
chamado de elemento (geometrico), um conjunto fechado limitado n ao
vazio com contorno suave por partes;
45
46 CAP
ITULO 4. M
ETODO DE ELEMENTOS FINITOS
(ii) P
K
chamado de espaco das funcoes de base, um espaco de func oes sobre K de
dimens ao nita k;
(iii)
K
chamado de o conjunto de graus de liberdade, uma base {L
i
}
i{1,...,k}
para
P
K
.
Ent ao (K, P
K
,
K
) e chamado de elemento nito.
Observacao 4.1. Ideia: Dado = [
i
]
i{1,...,n}
R
k
existe um unico p P
K
tal que
i
= L
i
(p), i {1, . . . , k}. (4.1)
Armamos que (4.1) e equivalente a {L
i
}
i{1,...,k}
ser uma base para P
K
.
Lema 4.1. Seja P
K
um espaco de dimensao k, e {L
i
}
i{1,...,k}
formas lineares sobre
P
K
. Entao temos as seguintes equivalencias:
(i) {L
i
}
i{1,...,k}
e uma base para P
K
;
(ii) Dado p P
K
tal que L
i
(p) = 0 i {1, . . . , k}, entao p = 0;
(iii) Dado = [
i
]
i{1,...,k}
R
k
, ! p P
K
tal que L
i
(p) =
i
.
Demonstracao. Seja {
i
}
i{1,...,k}
uma base para P
K
. Vamos provar que as condi coes
(i), (ii) e (iii) sao equivalentes ` a condi cao (iv) a matriz L := [L
j
(
i
)]
i,j{1,...,k}
e
inversvel. Portanto, (i), (ii), e (iii) s ao equivalentes.
((i) (iv)). Note que {L
i
}
i{1,...,k}
e uma base para P
K
se e somente se dado
L P
K
existe {
i
}
i{1,...,k}
, tal que
L =
k
j=1
j
L
j
(pois dimP
K
= dimP
K
).
Isso e verdade
{
i
}
i{1,...,k}
tal que L(p) =
k
j=1
j
L
j
(p), p P
k
,
{
i
}
i{1,...,k}
tal que L(
i
) =
k
j=1
j
L
j
(
i
), i {1, . . . , k},
{
i
}
i{1,...,k}
tal que R
i
=
k
j=1
j
L
j
(
i
), i {1, . . . , k}.
Logo,
L = ,
onde
:= [
j
]
j{1,...,k}
:= [
i
]
i{1,...,k}
.
47
Portanto, dado R
n
,
L = ,
tem soluc ao unica se e somente se L for inversvel. Isto e verdade se e somente se
{L
j
}
j{1,...,k}
for uma base para P
K
.
((ii),(iii) (iv)). Dado p P
K
temos que
p =
k
j=1
j
,
logo
L
i
(p) =
k
j=1
j
L
i
(
j
), i {1, . . . , k}.
Portanto, (iii) e equivalente a
! {
j
}
j{1,...,k}
R
k
tal que
k
j=1
j
L
i
(
j
) =
i
i {1, . . . , k}
! := [
j
]
j{1,...,k}
R
k
tal que L
T
= ,
L
T
e inversvel,
L e inversvel.
Tambem, (ii) e equivalente a
k
j=1
j
L
i
(
j
) = 0 i {1, . . . , k} =
j
= 0, j {1, . . . , k}
L
T
= 0 = = 0,
L
T
e inversvel,
L e inversvel.
Denicao 4.2. Seja {L
j
}
j{1,...,k}
uma base para P
K
. As funcoes de base {
i
}
i{1,...,k}
s ao chamadas de nodais se para cada i, j {1, . . . , k},
L
j
(
i
) =
ij
:=
1 i = j,
0 sen ao.
Observacao 4.2. As func oes de base nodais s ao unicas pelo lema anterior, e dado
p =
k
j=1
c
j
j
P
K
,
p =
k
j=1
L
i
(p)
j
P
K
.
48 CAP
ITULO 4. M
ETODO DE ELEMENTOS FINITOS
Denicao 4.3. Dizemos que
K
determina P
K
se para todo p P
K
L(p) = 0 p = 0 L
K
.
Denimos
_
_
K := [0, 1];
P
K
:= polinomios de grau menor ou igual a 1;
K
:= {L
0
, L
1
}, onde L
i
(p) = p(i), p P
K
, i {0, 1}.
Ent ao (K, P
K
,
K
) e um elemento nito pois, dado p P
K
e i {0, 1},
L
i
(p) = 0
_
_
p(0) = 0,
e
p(1) = 0,
e como p e linear, logo p = 0 em [0, 1].
As funcoes de base nodais {
j
}
j{0,1}
por denicao s ao tais que:
L
i
(
j
) =
ij
.
Como
j
(x) = a
j
+ b
j
x, temos
1 = L
0
(
0
) =
0
(0)
a
0
,
e
0 = L
1
(
0
) =
0
(1)
= a
0
+ b
0
,
logo a
0
= 1 e b
0
= 1. Procedendo da mesma forma para
1
, temos a
1
= 0 e b
1
= 1.
Logo,
0
(x) = 1 x, e
1
(x) = x.
Lema 4.2. Seja p(x), x R
d
um polinomio de grau k 1 que se anula sobre
{x : (x) = 0},
onde e uma funcao linear, chamado de hiperplano . Entao
p(x) = (x)q(x),
onde q e um polinomio de grau k 1.
Demonstracao. (Exerccio. Brenner e Scott pg. 71 por exemplo)
4.1 Exemplos de Elementos Finitos
4.1.1 Elemento de Lagrange linear em 2D
Denimos o elemento nito linear (veja gura 4.1)
_
_
K := tri angulo;
P
K
:= P
1
(K);
K
:= {L
i
}
i{1,2,3}
, onde L
i
(p) = p(a
i
), p P
K
.
4.1. EXEMPLOS DE ELEMENTOS FINITOS 49
a3
a2
2
1
3 a1
(a)
a3
a2
2
1
3
a4
a5
a6
a1
(b)
Figura 4.1: Elementos nitos triangulares P
1
(K) (a) e P
2
(K) (b).
A dimensao de P
K
e igual a cardinalidade de
K
. Provemos que
K
determina
P
K
(veja Def. 4.3). Devemos provar que: Dado p P
K
,
L
i
(p) = p(a
i
) = 0, i {1, 2, 3} = p = 0
Seja
i
, i {1, . . . , 3}, as fun coes lineares que caracterizam as arestas, i.e.,
{x,
i
(x) = 0}.
Como p|
1
e linear de uma vari avel, se anulando em a
2
e a
3
, logo p|
1
= 0. Pelo lema
anterior,
p =
1
q, onde q R.
Mas,
0 = p(a
1
) =
1
(a
1
)q q = 0,
pois
1
(a
1
) = 0. Ent ao p = 0.
4.1.2 Elemento de Lagrange quadratico em 2D
Denimos o elemento nito quadr atico (veja Fig 4.1)
_
_
K := tri angulo;
P
K
:= P
2
(K);
K
:= {L
i
}
i{1,...,6}
, onde L
i
(p) = p(a
i
), p P
K
.
Primeiro,
dimP
2
(K) = card
K
.
Suponhamos, dado p P
K
L
i
(p) = p(a
i
) = 0, i {1, . . . , 6},
e
j
, j {1, 2, 3} s ao func oes lineares que denem as arestas.
50 CAP
ITULO 4. M
ETODO DE ELEMENTOS FINITOS
a4 a3
a2
a1
2
4
3
1
Figura 4.2: Elemento nito rectangular Q
1
(K).
Como p|
1
e um polinomio quadr atico de uma variavel, e que se anula em
a
2
, a
3
e a
5
, logo p|
1
= 0. Portanto,
p =
1
q, q um polinomio linear.
Mas p|
2
= 0 tambem pelas mesmas razoes. Logo,
1
q|
2
= 0
1
|
2
= 0 ou q|
2
= 0.
Mas
1
pode ser zero apenas em um ponto de
2
(tri angulo n ao degenderado),
que implica
q|
2
= 0,
a menos de 1 ponto, mas q e uma func ao contnua logo
q|
2
= 0.
Pelo lema anterior
p =
1
2
r, onde r R.
Por outro lado
0 = p(a
6
) =
1
(a
6
)
2
(a
6
)r,
que implica r = 0 pois
1
(a
6
) = 0 e
2
(a
6
) = 0, ent ao p = 0.
4.1.3 Elemento de Lagrange bilinear em 2D
Denimos o elemento nito bilinear (veja gura 4.2)
_
_
K := ret angulo;
P
K
:= Q
1
(K);
K
:= {L
i
}
i{1,2,3,4}
, onde L
i
(p) = p(a
i
), p P
K
.
Primeiro, veja que
dimQ
1
(K) = 4 = card
K
.
Seja p P
K
, e suponha
L
i
(p) = p(a
1
) = 0, i {1, . . . , 4}.
4.1. EXEMPLOS DE ELEMENTOS FINITOS 51
2
1
3
s = (s1, s2)
n = (n1, n2)
a
3
= a
7
= a
10
a
2
= a
6
= a
9
a
4
a
1
= a
5
= a
8
2
1
3
n
3
n
2 n
1
Figura 4.3: Elementos nitos triangulares de Hermite (esquerda) e de RT0 (direita).
Como p|
1
e um polinomio linear de uma vari avel, assim como p|
2
, temos que p
decompoe-se como
p(x) = c
1
(x)
2
(y),
mas
p(a
4
) = c
1
(a
4
)(a
4
),
onde
1
(a
4
), (a
4
) = 0, portanto c = 0 p = 0.
4.1.4 Elemento de Hermite 2D
Denimos o elemento nito (veja Fig 4.3)
_
_
K := tri angulo;
P
K
:= P
3
(K);
K
:= {L
i
}
i{1,...,10}
,
onde, dado p P
K
,
L
i
(p) = p(a
i
), i {1, . . . , 4}, (4.2)
L
j
(p) =
p
x
(a
j
), j {5, . . . , 7}, (4.3)
L
k
(p) =
p
y
(a
k
), k {8, . . . , 10}. (4.4)
Seja p P
K
tal que
L
i
(p) = 0, i {1, . . . , 10},
ent ao p|
1
tem a
2
e a
3
como razes duplas pois p(a
2
) = p
(a
2
) = 0 e p(a
3
) = p
(a
3
) = 0,
onde p
:=
p
s
=
p
x
s
1
+
p
y
s
2
. Mas p|
1
e um polinomio de ordem 3 de uma variavel
com 4 razes, portanto p|
1
= 0. Analogamente, p|
2
= p|
3
= 0. Portanto,
p =
1
3
q, q R.
Logo,
0 = p(a
4
) =
1
(a
4
)
2
(a
4
)
3
(a
4
)q,
implica q = 0, isto e, p = 0.
52 CAP
ITULO 4. M
ETODO DE ELEMENTOS FINITOS
4.1.5 Elemento de Raviart-Thomas 2D
Denimos o elemento nito linear (veja Fig 4.3)
_
_
K := tri angulo;
P
K
:= {p(x) = + x, R
2
, R};
K
:= {L
i
}
i{1,...,3}
,
onde
L
i
(p) =
i
p n
i
ds.
Primeiro, veja que
p(x) =
x
y
=
1
1
0
+
2
0
1
x
y
.
Logo, se p = 0,
1
=
2
= = 0, ent ao
1
0
0
1
x
y
e uma base para
P
K
e dimP
K
= 3. Veja que
dimP
K
= 3 = card
K
.
Seja p P
K
tal que
L
i
(p) =
i
p n
i
ds = 0, i {1, 2, 3}.
Veja que
K
p dx =
K
p nds (4.5)
=
3
i=1
i
p n
i
ds
= 0.
Como p e linear, p R onde p = ( + x) = . De (4.5) temos que
p = 0, logo = 0. Neste momento,
p(x) = R
2
,
mas
i
p n
i
ds =
i
n
i
ds (4.6)
= 0, i {1, 2, 3}, (4.7)
que implica n
i
= 0, i {1, 2, 3}, e logo e ortogonal a uma base do R
2
, isto e,
= 0.
4.2. ELEMENTO FINITO DE LAGRANGE P
K
(K) EM R
D
53
v1 v2 v1 v2
v3
v1
v4 v2
v3
Figura 4.4: Exemplos de d-simplex em 1D (esquerda), 2D (centro), e 3D (direita).
4.2 Elemento Finito de Lagrange P
k
(K) em R
d
4.2.1 Elemento d-simplex
Denicao 4.4 (d-simplex). Um d-simplex K R
d
, d = {1, 2, 3} e o envelope
convexo de d + 1 pontos a
j
= [a
i j
]
i{1,...,d+1}
, j {1, . . . , d + 1}, chamados de
vertices de K, que n ao estao contidos no hiperplano de R
d
, isto e,
A = [a
1
a
2
a
d+1
] =
_
_
a
1 1
a
1 2
a
1 d
a
1 d+1
a
2 1
a
2 2
a
2 d
a
2 d+1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
a
d 1
a
d 2
a
d d
a
d d+1
1 1 1 1
_
_
,
e inversvel.
Exemplo 4.1. Consideramos os seguintes exemplos em 1D, 2D, e 3D (veja gura
4.4):
(i) d = 1, segmento;
(ii) d = 2, tri angulo;
(iii) d = 3, tetrahedro.
Seja K R
d
um d-simplex com d + 1 vertices a
j
= [a
i j
]
i,j{1,...,d+1}
(denic ao
4.4). Lembre que a matriz
A = [a
1
a
2
a
d+1
] =
_
_
a
1 1
a
1 2
a
1 d
a
1 d+1
a
2 1
a
2 2
a
2 d
a
2 d+1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
a
d 1
a
d 2
a
d d
a
d d+1
1 1 1 1
_
_
,
54 CAP
ITULO 4. M
ETODO DE ELEMENTOS FINITOS
hK
K
Figura 4.5: Visualizac ao dos aspectos geometricos.
e inversvel, e veja que
| det A| = d!|K| =
_
_
|K| d = 1
2|K| d = 2
6|K| d = 3
.
.
.
.
.
.
.
Denicao 4.5. Seja K um d-Simplex. Denimos os seguintes aspectos geometricos
(veja gura 4.5):
h
K
= diam(K) = comprimento da maior aresta de K;
K
= diametro da bola (esfera) inscrita em K;
K
=
h
K
K
e a medida de n ao degenerencia de K.
Seja a tripla (K, P
K
,
K
) denida como
_
_
K := d-simplex;
P
K
:= P
k
(K) = polin omios de grau menor ou igual a k sobre K;
K
:= {L
i
}
i{1,...,k
}
, onde L
i
(p) = p(a
i
), p P
K
, i {0, . . . , k
}.
onde a
i
s ao os nos de K.
Queremos provar que a tripla e um elemento nito. Precisamos caracterizar
P
k
(K) e K de forma conveniente. Dado x = (x
1
, . . . , x
d
) R
d
, o espaco P
k
(K) e
gerado por
i=1
x
i
i
, 0 || k
,
onde
d
i=1
representa o produto e || =
d
j=1
j
.
Exemplo 4.2. Exemplos de bases.
d = 1:
d
i=1
x
1
1
, 0 || k
k = 0: Neste caso,
1
= 0 {1}, dimP
0
(K) = 1.
4.2. ELEMENTO FINITO DE LAGRANGE P
K
(K) EM R
D
55
k = 1: Neste caso, 0
1
1 {1, x}, dimP
1
(K) = 2.
k = 2: Neste caso, 0
1
2 {1, x, x
2
}, dimP
2
(K) = 3.
d = 2:
d
i=1
x
1
1
x
2
2
, 0 || k
k = 0: Neste caso,
1
+
2
= 0 {1}, dimP
0
(K) = 1.
k = 1: Neste caso, 0
1
+
2
1 {1, x
1
, x
2
}, dimP
1
(K) = 3.
k = 2: Neste caso, 0
1
+
2
2 {1, x
1
, x
2
, x
1
x
2
, x
2
1
, x
2
2
}, dimP
2
(K) = 6.
d = 3:
d
i=1
x
1
1
x
2
2
, 0 || k
k = 0: Neste caso,
1
+
2
+
3
= 0 {1}, dimP
0
(K) = 1.
k = 1: Neste caso, 0
1
+
2
+
3
1 {1, x
1
, x
2
, x
3
}, dimP
1
(K) = 4.
De forma geral temos que (pode ser provado por indu cao)
dimP
k
(K) =
(k + d)!
k! d!
.
Portanto, devemos denir
k
=
(k + d)!
k! d!
,
formas lineares linearmente independentes. Devemos portanto determinar a loca-
lizac ao de k
n os a
j
no elemento K, o que nos leva a dever representar K de forma
conveniente.
4.2.2 Coordenadas baricentricas
O objetivo das coordenadas baricentricas e descrever o triangulo K de modo mais
conveniente do que por coordenadas cartesianas.
Denicao 4.6 (Coordenadas Baricentricas). Seja K R
d
, d {1, 2, 3}, um ele-
mento geometrico d-simplex. Dado x K, denimos suas coordenadas baricentricas
{
i
(x)}
i{1,...,d+1}
como a solu cao do seguinte sistema
d+1
i=1
a
i
i
(x) = x
d+1
i=1
i
(x) = 1,
onde a
i
s ao os nos de K.
Observacao 4.3. Veja que o sistema tem a forma
A = b,
56 CAP
ITULO 4. M
ETODO DE ELEMENTOS FINITOS
onde
A = [a
1
a
2
a
d+1
] =
_
_
a
1 1
a
1 2
a
1 d
a
1 d+1
a
2 1
a
2 2
a
2 d
a
2 d+1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
a
d 1
a
d 2
a
d d
a
d d+1
1 1 1 1
_
_
, (4.8)
=
_
1
(x)
.
.
.
d+1
(x)
_
_
, b =
_
_
x
1
.
.
.
x
d+1
_
_
. (4.9)
Logo, como K e um d-simplex det A = 0, e o sistema tem soluc ao unica. Alem
disso, as coordenadas baricentricas
i
(x) P
1
(K) pois
= A
1
b.
Observacao 4.4. Observe que:
(i)
i
(a
j
) =
ij
=
1 i = j
0 i = j
.
Logo {
i
}
i{1,...,d+1}
e a base nodal para P
1
(K).
(ii) Podemos denir
K := {x R
d
: 0
i
(x) 1, 1 i d + 1}
(iii) Dado p P
1
(K) ent ao
p(x) =
d+1
i=1
p(a
i
)
i
(x).
Exemplo 4.3.
(i) 1D (veja gura 4.6)
Dado x K, as coordenadas baricentricas s ao denidas por
a
1
1
(x) + a
2
2
(x) = x
1
(x) +
2
(x) = 1.
4.2. ELEMENTO FINITO DE LAGRANGE P
K
(K) EM R
D
57
Logo,
2
(x) = 1
1
(x) e dado h := a
2
a
1
temos
a
1
1
(x) + a
2
(1
1
(x)) = x
1
(x) =
x a
2
a
1
a
2
1
(x) =
a
2
x
h
.
Portanto,
2
(x) = 1
a
2
x
h
=
x a
1
h
.
Logo, x (
1
,
2
) = (
a
2
x
h
,
xa
1
h
).
(ii) 2D
Dado x K,
a
1
1
(x) + a
2
2
(x) + a
3
3
(x) = x
1
(x) +
2
(x) +
3
(x) = 1.
Logo,
3
(x) = 1
1
(x)
2
(x) e temos
(a
1
a
3
)
1
(x) + (a
2
a
3
)
2
(x) + a
3
= x
B
1
(x)
2
(x)
= x a
3
,
onde
B := [a
1
a
3
, a
2
a
3
].
Como as colunas da matrix B s ao linearmente independentes (veja gura 4.6),
a matriz e inversvel e temos:
1
(x) =
(a
2 2
a
1 3
)(x
1
a
1 3
) + (a
1 3
a
1 2
)(x
2
a
2 3
)
(a
2 2
a
1 3
)(a
1, 1
a
1 3
) + (a
1 3
a
1 2
)(a
2 1
a
2 3
)
2
(x) =
(a
2 3
a
2 1
)(x
1
a
1 3
) + (a
1 1
a
1 3
)(x
2
a
2 3
)
(a
2 3
a
2 1
)(a
1, 2
a
1 3
) + (a
1 1
a
1 3
)(a
2 2
a
2 3
)
3
(x) = 1
1
(x)
2
(x)
Observacao 4.5.
(i) Seja
K := [0, 1] (gura 4.7). As coordenadas baricentricas s ao:
1
(x) = x,
2
(x) = 1 x.
(ii) Seja
K o triangulo mostrado na gura 4.7. As coordenadas baricentricas s ao:
1
(x) = 1 x
1
x
2
,
2
(x) = x
1
,
3
(x) = x
2
58 CAP
ITULO 4. M
ETODO DE ELEMENTOS FINITOS
a1 a2 x
h = a2 a1
a
1
a
3
x
a
2
Figura 4.6: Exemplos de domnios d-simplex em 1D (esquerda) e 2D (direita). O da
direita tambem mostra os vetores independentes a
1
a
3
e a
2
a
3
.
a2 = 1 a1 = 0
x (1, 2)
a
3
= (0, 1)
T
x (1, 2, 3)
a
1
= (0, 0)
T
a
2
= (1, 0)
T
Figura 4.7: Exemplos de domnios d-simplex unit arios em 1D (esquerda) e 2D (di-
reita).
4.2. ELEMENTO FINITO DE LAGRANGE P
K
(K) EM R
D
59
Observacao 4.6 (Assumido). Seja
i
0 para i {1, . . . , d + 1}, temos que
1
1
d+1
d+1
dx =
1
!
d+1
!d!
(
1
+ +
d+1
+ d)!
|K|
Exemplo 4.4. Em 1D, temos
1
dx =
2!1!
(2 + 1)!
|K| =
2
6
|K| =
1
3
|K|,
2
dx =
1!1!
(1 + 1 + 1)!
|K| =
1
6
|K|.
Construimos ate o momento formas de representar P
k
(K) e K. Vamos agora
construir as formas lineares de
K
, i.e., os n os do elemento K onde p ser a avaliado.
Denicao 4.7. Seja k 0. Chamamos de grade principal de ordem k de K,
denotado por T
k
(K), o seguinte conjunto
T
k
(K) =
{x R
d
:
j
(x) =
1
d+1
, 1 j d + 1}, k = 0,
{x R
d
:
j
(x) {0,
1
k
, . . . ,
k
k+1
, 1} 1 j d + 1}, k 1.
Exemplo 4.5.
T
0
(K) = 1 ponto no baricentro
1D Veja gura 4.8
{x R :
j
(x) =
1
2
, j = 1, 2}.
2D Veja gura 4.9
{x R
2
:
j
(x) =
1
3
, 1 j 3}.
T
1
(k) = vertices
1D Veja gura 4.8
{x R :
j
(x) {0, 1}, j = 1, 2}.
2D Veja gura 4.9
{x R
2
:
j
(x) {0, 1}, 1 j 3}.
T
2
(k) = vertices + meio das arestas
1D Veja gura 4.8
{x R :
j
(x) {0,
1
2
, 1}, j = 1, 2}.
60 CAP
ITULO 4. M
ETODO DE ELEMENTOS FINITOS
a2 a2 a1 a2 a1 a3
Figura 4.8: Exemplos de grades principais T
k
(K) em 1D com k = 0 (esquerda),
k = 1 (centro) e k = 2 (direita).
a
1
a
3
a
1
a
2
a
3
a
6
a
1
a
4
a
5
a
2
Figura 4.9: Exemplos de grades principais T
k
(K) em 2D com k = 0 (esquerda),
k = 1 (centro) e k = 2 (direita).
1
= 1
1
=
2
3
1
= 0
3
=
1
3
3
= 0
3
= 1
2
=
1
3
2
=
2
3
2
= 0
2
= 1
3
=
2
3
1
=
1
3
Figura 4.10: Exemplo de grade principal T
3
(K) em 2D.
4.2. ELEMENTO FINITO DE LAGRANGE P
K
(K) EM R
D
61
2D Veja gura 4.9
{x R
2
:
j
(x) {0,
1
2
, 1}, 1 j 3}.
Veja gura 4.10 para ver a forma construtiva no caso T
3
(K) em 2D.
Lema 4.3. Seja K um d-simplex e T
k
(K) sua grade principal de ordem k, k 0.
Portanto a tripla (K, P
K
,
K
) onde P
K
:= P
k
(K) e
K
:= {L
i
}
i{1,...,k
}
, com L
i
(p) =
p(a
i
), p P
K
, onde a
i
T
k
(K), e um elemento nito.
Demonstracao. Primeiro, por constru cao temos que
k
= card
K
= dimP
k
(K) =
(k + d)!
k!d!
.
Temos que vericar que dado p P
k
(K), k 0, tal que
L
i
(p) = p(a
i
) = 0, i {1, . . . , k
},
implica p 0. Provamos por induc ao sobre d.
(i) d = 1:
Neste caso temos que p P
k
(K) se anula em k + 1 pontos, isto e, os pontos x
tais que
1
(x) = 0,
1
(x) =
1
k
, . . . ,
1
(x) = 1.
Portanto p e divisvel por
1
(x)(
1
(x)
1
k
) (
1
(x) 1),
que e um polin omio de ordem k + 1. Logo p = 0.
(ii) Assuma a propriedade v alida em d 1. Seja p um polinomio de P
k
(K) se
anulando nos pontos de T
k
(K). Seja
i
o hiperplano associado a
1
(x) = 0.
Logo p|
1
e um polin omio que pertence a P
k
(K) de d 1 vari aveis. Logo p|
1
se anula na grade principal de ordem k, e pela hipotese de induc ao p|
1
= 0.
Portanto,
p =
1
q, onde q P
k1
(K).
Em seguida, restrinja p|
2
onde
2
e o hiperplano de dimens ao d 1 associado
a
1
=
1
k
. Como
1
|
2
= 0,
logo q|
2
se anula na grade principal de ordem k 1 associada a
2
. Pela
hip otese de induc ao q|
2
= 0, que implica
p =
1
(
1
1
k
)r, onde r P
k2
(K).
Interando k vezes, utilizando o mesmo argumento, provamos que p e divisvel
pelo polin omio de grau k + 1, a saber
1
(
1
1
k
) (
1
1).
Portanto p 0.
62 CAP
ITULO 4. M
ETODO DE ELEMENTOS FINITOS
Exemplo 4.6 (C alculo das func oes de base nodais).
(i)
_
_
K := d-simplex;
P
K
:= P
0
(K)(= polinomio constante);
K
:= {L
i
}
i{1,...,k
}
, onde L
i
(p) = p(a
i
), a
i
T
0
(K).
Logo, dimP
0
(K) = 1 = card
K
= k
e a
1
e o baricentro.
Seja
1
P
0
(K) tal que L
1
(
1
) = 1
1
= 1.
(ii)
_
_
K := d-simplex;
P
K
:= P
1
(K);
K
:= {L
i
}
i{1,...,k
}
, onde L
i
(p) = p(a
i
), a
i
T
1
(K).
Logo, dimP
1
(K) = d + 1 e T
1
(K) e composto dos vertices do d-simplex, com
k
= card
K
= d + 1. As funcoes de base nodais sao
L
i
(
j
) =
ij
, i, j {1, . . . , d + 1},
que implica
j
=
j
.
(iii)
_
_
K := d-simplex;
P
K
:= P
2
(K);
K
:= {L
i
}
i{1,...,k
}
, onde L
i
(p) = p(a
i
), a
i
T
2
(K).
Logo, dimP
2
(K) =
(d+1)!
2d!
=
(d+1)(d+2)
2
= cardT
2
(K) e T
2
(K) e composto pelos
vertices do d-simplex e os pontos no meio dos lados. Denotando a
ij
o n o entre
os nos a
i
e a
j
, temos
L
i
(
j
) =
ij
, i, j {1, . . . ,
(d + 1)(d + 2)
2
}.
Temos
j
=
j
(2
j
1), j {1, . . . , d +1} e
ij
= 4
i
j
, i, j {1, . . . , d +1}.
Veja gura 4.11.
4.3 Nocao de Elemento de Referencia
Objetivo: Dado um elemento nito (K, P
K
,
K
) queremos associ a-lo a um elemento
nito de referencia (
K, P
K
,
K
).
Denicao 4.8. Uma tranforma cao F : R
d
R
d
e dita am se existe uma matriz
B e um vetor b tal que
x = F( x) = B x + b, x R
d
.
4.3. NOC
AO DE ELEMENTO DE REFER
ENCIA 63
1
a
13
a
1
a
2
a
13
a
3
a
12
a
1
a
12
a
2
a
23
a
3
a
13
13
Figura 4.11: Exemplos de func oes de base quadr aticas associadas a um vertice
(esquerda) e a um ponto no meio de uma aresta (direita) de um tri angulo.
2
( x) = 1 x
1
( x) = x
0 1
3
( x) = y
1
( x) = 1 x y
2
( x) = x
a
3
= (0, 1)
T
a
2
= (1, 0)
T
a
1
= (0, 0)
T
Figura 4.12: O 1-simplex (esquerda) e o 2-simplex (direita) de referencia.
Observacao 4.7.
F P
1
(R
d
).
A transformac ao e inversvel, e logo F e uma bije cao, se e somente se det B = 0,
e logo F
1
P
1
(R
d
), pois
x = F
1
(x) = B
1
(x b).
Denicao 4.9. Um d-simplex
K e chamado d-simplex de referencia se um vertice a
1
tiver todas suas coordenadas iguais a zero, e os d vertices restantes uma coordenada
igual a 1 e as outras iguais a 0.
Lema 4.4. Seja K um d-simplex. Existe uma bijecao F
K
P
1
(
K) tal que
F
K
:
K K,
onde os vertices de
K coincidem com os vertices de K.
64 CAP
ITULO 4. M
ETODO DE ELEMENTOS FINITOS
F
K
F
1
K
K
K
a
1
a
2
a
3
a
1
a
2
a
3
B = (a
3
a
1
, a
3
a
2
)
Figura 4.13: Acao da matriz B.
Demonstracao. Seja a
1
, a
2
, . . . , a
d+1
os vertices de K. Escolha
b = a
d+1
,
e construa B de forma que suas colunas sejam formadas pelos vetores
b
j
= a
j
a
d+1
, j {1, . . . , d}.
(Veja gura 4.13 para um exemplo em 2D.) Pela deni cao de um d-simplex, det B =
0. Portanto, escolhendo
F( x) = B x + b,
temos que F( a
i
) = a
i
, e logo F e uma bijecao de
K em K, pois toda transformacao
am preserva a convexidade, e logo, o envelope convexo
K e preservado, isto e,
F(
K) = K.
Observacao 4.8.
(i) A transforma cao F n ao e unica, pois podemos numerar os vertices de (d + 1)!
formas.
(ii) Usamos a transformac ao F para transportar objetos de
K sobre K. Deno-
tamos por q a quantidade obtida pelo transporte de q.
(a) x = F
1
K
(x) ou x = F
K
( x) (veja gura 4.14)
(b) Seja v(x) um fun cao denida sobre K. Denimos v( x) por
v( x) := v(F
K
( x)) = v(x) v = v F
K
.
(c) Seja L uma forma linear sobre P
K
. Denimos
L por
L( v) = L( v F
1
K
) = L(v).
4.3. NOC
AO DE ELEMENTO DE REFER
ENCIA 65
F
K
F
1
K
K
K
x = F
K
( x)
x
x
Figura 4.14: Exemplo de um mapeamento bijetivo entre o elemento de referencia e
um elemento fsico.
(iii) As coordenadas baricentricas s ao invariantes por transformac ao am, isto e,
i
( x) =
i
(x).
Denicao 4.10. Seja (K, P
K
,
K
) um elemento nito. Dizemos que um elemento
nito (K
, P
K
,
K
) e am equivalente `a (K, P
K
,
K
) se existe uma tranformacao
am F
K
(x
) = B x
+ b com det B = 0, tal que
1. F(K) = K
;
2. P
K
e tal que P
K
= {p
= p F
1
K
: p P
K
};
3.
K
e tal que
K
= {L
i
: L
i
(p
) = L
i
(p
F
K
), L
i
K
}.
Observacao 4.9.
1. Dois elementos nitos de Lagrange de ordem k s ao am equivalentes.
2. Dois elementos nitos de Crouzeix-Raviart sao am equivalentes. Os elementos
de Raviart-Thomas nao s ao am-equivalentes.
3. Dado um elemento nito de referencia (
K,
P := P
K
,
:=
K
) de Lagrange de
ordem k, para todo K existe uma transformacao am F
K
( x) = B x + b, com
det B = 0, tal que
F
K
(
K) = K,
e logo (K, P
K
,
K
) e um elemento nito de Lagrange de ordem k com
P
K
:= { p F
1
K
: p
P};
K
:= {L
i
: L
i
(p) =
L
i
(p F
K
),
L
i
}.
66 CAP
ITULO 4. M
ETODO DE ELEMENTOS FINITOS
F
K
F
1
K
K
(
K,
P,
)
(K, P
K
,
K
)
K
K
Figura 4.15: Mapeamento entre o elemento nito de referencia e um elemento fsico.
4.4 Elemento Finito Global de Lagrange P
k
()
Considere um espaco de func oes polinomiais por partes sobre a malha (veja gura
1.11 para um exemplo do caso P
1
()). Perguntas:
Um polinomio p sobre tal que p|
K
P
k
(K) com seus graus de liberdade
xados atraves de
K
localmente, e univocamente determinado?
p e uma func ao contnua sobre ?
4.4.1 Malha de elementos nitos
Denicao 4.11. Uma triangularizacao (ou particao) conforme de e um conjunto
nito T
h
de elementos K tal que
(i)
=
KT
h
K;
(ii) A intersec ao de dois elementos distintos de T
h
e vazia, um vertice ou uma
aresta (face).
Lembre os exemplos de triangulariza coes conforme e nao conforme na gura 1.10.
Lembramos que (denic ao 4.5)
h
K
= diametro de K;
K
= diametro da bola inscrita em K.
Denimos tambem
h = max
KT
h
h
K
.
4.4. ELEMENTO FINITO GLOBAL DE LAGRANGE P
K
() 67
Figura 4.16: Partic ao regular {T
h
}
h>0
que nao e quasi-uniforme.
Denicao 4.12. Uma famlia {T
h
}
h>0
de triangularizac oes e dita regular se existe
uma constante positiva tal que, para todo h,
K
:=
h
K
K
.
Observacao 4.10. Interpreta cao:
existe
0
> 0 tal que o menor angulo de K e maior que
0
;
existe N
K
> 0 tal que o n umero de elementos K com um vetice comum e
menor que N
K
;
existe N > 0 tal que se K e K
dividem um n o, h
K
/h
K
e menor que N.
Denicao 4.13. Uma famlia de partic oes {T
h
}
h>0
e dita quase-uniforme se existe
uma constante C > 0 tal que
Ch h
K
h,
para todo K T
h
.
Veja gura 4.16 para ver um exemplo de uma famlia {T
h
}
h>0
de partic oes que
e regular mas n ao quasi-uniforme.
4.4.2 Graus de liberdade globais
Denicao 4.14. Seja k > 0 e seja
h
o conjunto de nos globais associado `a malha
T
h
.
h
e denida por
h
:=
KT
h
T
k
(K),
onde T
k
(K) e a grade principal de K de ordem k
Denicao 4.15. O conjunto
h
denido por
h
:=
KT
h
K
,
e chamado graus de liberdade globais, onde
K
e o conjunto de formas lineares
associado ao elemento nito (K, P
K
,
K
). Em
h
conta-se apenas uma vez os graus
de liberdade comuns a diferentes elementos K.
68 CAP
ITULO 4. M
ETODO DE ELEMENTOS FINITOS
K
K
Figura 4.17: Dois tri angulos adjacentes em uma malha nao estrutura.
4.4.3 Espaco global de elementos nitos
Denotamos V
h
o espaco de elementos nitos, tal que p V
h
implica p|
K
ser um
polin omio de ordem k sobre K T
h
e caracterizado pelas formas linear L
i
h
,
onde,
L
i
(p) = p(a
i
), a
i
h
.
Lema 4.5.
V
h
= {p P
k
(K), K T
h
}.
Demonstracao. Seja p uma funcao denida em
, polin omial de ordem k em cada
K T
h
, e com um valor unico em cada a
i
h
. Seja K, K
T
h
adjacentes
(veja gura 4.17). Portanto p|
K
e p|
K
sobre K K
coincidem nos n os a
i
T
k
(K) T
k
(K
). Por outro lado T
k
(K) T
k
(K
) e uma grade principal de ordem k
prar o d 1-simplex K K
. Mas p|
K
p|
K
sobre K K
e um polinomio de
grau k que se anula em k + 1 pontos, logo p|
K
= p|
K
sobre K K
.
Observacao 4.11.
(i) V
h
H
1
().
(ii) A aplicacao p p(a
i
), a
i
h
e um isomorsmo de V
h
em R
card
h
, logo
dimV
h
= card
h
. Logo dizemos que a aproximac ao e H
1
-conforme.
(iii) Dado a
i
h
, a base nodal
i
associada a a
i
e
j
(a
i
) = L
i
(
j
) =
ij
.
Logo
j
tem como suporte os elementos K que contem a
j
, onde
j
quando
restrita a K coincide com a fun cao de base do elemento nito (K, P
K
,
K
) (veja
gura 1.11). Alem disso,
p(x) =
i
p(a
i
)
i
(x), x .
4.5. APROXIMAC
AO POLINOMIAL 69
Observacao 4.12. Podemos integrar condicoes de contorno de Dirichlet homogeneas
denindo
V
0
h
:= V
h
H
1
0
().
Neste caso devemos retirar de
h
os nos contidos sobre , isto e, denimos
0,h
:= {a
h
\ }.
As funcoes de base s ao
j
tal que
j
(a
i
) =
ij
, a
i
0,h
.
4.5 Aproximacao Polinomial
Lembre que, pelo lema de Cea, existe uma constante C > 0 tal que
u u
h
V
Cu v
h
V
, v
h
V
h
,
onde u e a soluc ao exata de (3.1) e u
h
e a soluc ao de (3.2).
Ideia. Escolher v
h
= Iu, onde I : V V
h
e o operador de interpolac ao.
Observacao 4.13. O operador I s o faz sentido quando denido sobre func oes contnuas.
Em casos menos regulares, podemos usar outros operadores (projecao, regularizan-
tes).
Logo, existe C > 0 tal que
u u
h
2
V
Cu Iu
2
V
= C
K
u I
K
u
2
V (K)
,
onde I
K
u = Iu|
K
.
Devemos portanto estimar localmente
u I
K
u
V (K)
.
4.5.1 Erro de interpolacao local
Seja k > 0, K T
h
e (K, P
k
(K),
K
) um elemento nito de Lagrange de ordem k.
Denicao 4.16. Denotamos I
k
K
um operador de interpolacao local com valores em
P
k
(K) sobre o espaco das funcoes contnuas em K por
(I
k
K
p)(a) = p(a), a T
k
(K),
se e somente se
I
k
K
p(x) =
n
i=1
p(a
i
)
i
(x), a
i
T
k
(K),
e n =
(k+d)!
k!d!
,
i
(x) e base nodal de P
k
(K).
70 CAP
ITULO 4. M
ETODO DE ELEMENTOS FINITOS
Lema 4.6. Seja K um d-simplex, e (K, P
K
,
K
) um elemento nito de Lagrande
de ordem k. Entao existe C > 0, dependente apenas do elementos de referencia
(
K, P
K
,
K
) tal que, m Z, 0 m k + 1,
|v I
k
K
v|
H
m
(K)
C
h
k+1
K
m
K
|v|
H
k+1
(K)
, v H
k+1
(K).
Demonstracao. Assumido.
Observacao 4.14.
(i) v I
k
K
v
L
2
(K)
Ch
k+1
K
|v|
H
k+1
(K)
k = 1 : v I
1
K
v
L
2
(K)
Ch
2
K
|v|
H
2
(K)
k = 2 : v I
2
K
v
L
2
(K)
Ch
3
K
|v|
H
3
(K)
(ii) |v I
k
K
v|
H
1
(K)
C
h
K
K
h
k
K
|v|
H
k+1
(K)
k = 1 : |v I
1
K
v|
H
1
(K)
C
h
K
K
h
K
|v|
H
2
(K)
k = 2 : |v I
2
K
v|
H
1
(K)
C
h
K
K
h
2
K
|v|
H
3
(K)
Sabemos que dado v H
1
0
() existe C
> 0 tal que
v
L
2
()
C
|v|
H
1
()
.
Quando v H
1
0
(K) temos entao
v
L
2
(K)
C
K
|v|
H
1
(K)
.
Quest oes
(i)
E possvel explicitar C
K
em termos de h
K
? De fato, C
K
= ch
K
, c > 0.
(ii)
E possvel termos C > 0 tal que
v
H
1
(K)
Ch
K
v
L
2
(K)
,
para Z?
Observacao 4.15. Se v pertence a um espaco de dimensao innita, (ii) e falso!
4.5. APROXIMAC
AO POLINOMIAL 71
Lema 4.7 (Desigualidade inversa). Seja (
K, P
K
,
K
) um elemento nito de re-
ferencia. Seja {T
h
}
h>0
uma famlia de triangularizacao regular, sobre a qual, para
cada K T
h
tem-se (K, P
K
,
K
) um elemento am equivalente a (
K, P
K
,
K
). Su-
ponhamos, h 1.
Entao existe C > 0 independente de h
K
, tal que
v
H
1
(K)
Ch
1
K
v
L
2
(K)
, v P
K
.
Demonstracao. Como estamos em dimens ao nita, todas as normas s ao equivalentes,
logo existe C > 0, dependente apenas de
K e
P, tal que
v
H
1
(
K)
C v
L
2
(
K)
, v
P. (4.10)
De (4.10) temos
|v|
H
1
(K)
C
2
|K|
1
2
K
| v|
H
1
(
K)
C
2
|K|
1
2
K
v
H
1
(
K)
C
2
C
|K|
1
2
K
v
L
2
(
K)
.
Mas
v
2
L
2
(K)
=
K
(v
2
)dx
=
K
( v
2
)| det B|d x
= | det B|
K
( v
2
)d x
=
|K|
|
K|
K
( v
2
)d x
= C|K| v
2
L
2
(
K)
,
portanto
v
L
2
(K)
= C|K|
1
2
v
L
2
(
K)
.
Logo,
|v|
H
1
(K)
C
|K|
1
2
K
|K|
1
2
v
L
2
(K)
C
K
v
L
2
(K)
.
Como a famlia de triangularizacao e regular, existe > 0 tal que
h
K
K
=
1
h
K
,
72 CAP
ITULO 4. M
ETODO DE ELEMENTOS FINITOS
e portanto,
|v|
H
1
(K)
C
h
K
v
L
2
(K)
.
Utilizando a denicao da norma H
1
(), temos
v
2
H
1
(K)
= v
2
L
2
(K)
+ |v|
2
H
1
(K)
v
2
L
2
(K)
+
C
h
2
K
v
2
L
2
(K)
(h
2
K
+ C)
h
2
K
v
2
L
2
(K)
.
Como por hip otese h
K
h 1, obtemos
v
H
1
(K)
C
h
K
v
L
2
(K)
.
4.5.2 Erro de interpolacao global
Seja (
K, P
K
,
K
) o elemento nito de referencia de Lagrange de ordem k, k > 0, e
(K, P
K
,
K
) o correspondente elemento nito (via transformacao am) de Lagrange
de ordem k sobre o d-simplex K.
Seja V
h
o seguinte espaco de aproximacao
V
h
:= {v C
0
(
) : v|
K
P
k
(K), K T
h
},
onde {T
h
}
h>0
e uma famlia de malhas regulares.
Finalmente, seja o operador de interpolac ao global de ordem k,
I
k
h
: H
k+1
() V
h
, (v I
k
h
v),
tal que
I
k
h
v|
K
= I
k
K
v.
Lema 4.8. Assuma as hipoteses do Lema 4.7 validas. Seja R
d
um domnio
aberto limitado com fronteira poligonal. Existe C > 0, independente de h > 0 tal
que, v H
k+1
(),
v I
k
h
v
L
2
()
+
k+1
m=1
h
m
|v I
k
h
v|
H
m
()
Ch
k+1
|v|
H
k+1
()
.
Se v H
1
() temos
lim
h0
inf
v
h
V
h
|v v
h
|
H
1
()
= 0.
4.5. APROXIMAC
AO POLINOMIAL 73
Demonstracao. Por denic ao temos
v I
k
h
v
2
L
2
()
=
KT
h
v I
k
K
v
2
L
2
(K)
C
KT
h
h
2k+2
K
0
K
|v|
2
H
k+1
(K)
,
Ch
2k+2
KT
h
|v|
2
H
k+1
(K)
,
Ch
2k+2
|v|
2
H
k+1
()
, (4.11)
portanto
v I
k
h
v
L
2
()
Ch
k+1
|v|
H
k+1
()
.
Agora, tome m tal que 1 m k + 1. Logo,
h
2m
|v I
k
h
v|
2
H
m
()
= h
2m
KT
h
|v I
k
K
v|
2
H
m
(K)
h
2m
KT
h
h
2k+2
K
2m
K
|v|
2
H
k+1
(K)
Ch
2m
KT
h
h
2k+22m
K
|v|
2
H
k+1
(K)
(malha regular)
Ch
2k+2
KT
h
|v|
2
H
k+1
(K)
Ch
2k+2
|v|
2
H
k+1
()
,
e portanto
h
m
|v I
k
h
v|
H
m
()
Ch
k+1
|v|
H
k+1
()
.
O resultado segue somando o resultado acima para 1 m k + 1 e (4.11).
Seja v H
1
(). Como H
2
() e denso em H
1
(), existe w H
2
() tal que
|v w|
H
1
()
, > 0.
Aplicando o resultado anterior com w temos
inf
v
h
V
h
|w v
h
|
H
1
()
|w I
k
h
w|
H
1
()
Ch|w|
H
2
()
,
logo
lim
h0
inf
v
h
V
h
|v v
h
|
H
1
()
|v w|
H
1
()
+ lim
h0
inf
v
h
V
h
|w v
h
|
,
e como e arbitr ario o segundo resultado segue.
74 CAP
ITULO 4. M
ETODO DE ELEMENTOS FINITOS
Captulo 5
Aplicacao do Metodo de
Elementos Finitos
5.1 Elemento nito de Lagrange de ordem P
k
()
Denimos o operador
Lu := (u) + u + u.
Considere o problema
_
_
_
Achar u tal que
Lu = f, em ,
u = 0, em,
(5.1)
onde R
d
um domnio aberto limitado com fronteira poligonal .
Supomos
L
() = (x) >
0
positiva.
(x) = (
1
(x), . . . ,
d
(x))
T
,
i
C
0
(
) e = 0.
L
() = (x) >
0
> 0 positiva.
f L
2
().
Multiplicando a EDP do problema (5.1) por v H
1
0
() (a fun cao teste),
(u) v dx +
u v dx +
uv dx =
f v dx. (5.2)
Usando a formula de Green e v |
= 0, temos
(u) v dx =
u v dx
u nv ds,
75
76 CAP
ITULO 5. APLICAC
AO DO M
ETODO DE ELEMENTOS FINITOS
portanto, (5.2) torna-se,
u v dx +
u v dx +
uv dx =
f v dx. (5.3)
Seja (V, (., .)
V
) o seguinte espaco de Hilbert
V := H
1
0
() ,
(u, v)
V
=
u v dx +
u v dx.
Portanto o problema variacional correspondente ao problema (5.1) e
Achar u V tal que
a(u, v) = L(v), v V,
(5.4)
onde
a(u, v) :=
u v dx +
u v dx +
uv dx
L(u) :=
f v dx.
Observacao 5.1. A soluc ao do problema (5.4) satisfaz (5.1) quase sempre, isto e,
u V
Lu v dx =
f v dx, v L
2
() Lu = f em L
2
().
(Guermond e Ern [1])
A formulacao variacional (5.4) tem solucao unica em V . De fato, provemos as
hip oteses do Teorema de Lax-Milgram.
(i) Continuidade de L(). Dado v V ,
|L(v)| = |
f v dx| f
L
2
()
v
L
2
()
C
f
L
2
()
v
H
1
()
,
logo
|L(v)| C
L
v
H
1
()
,
onde C
L
:= C
f
L
2
()
> 0.
5.1. ELEMENTO FINITO DE LAGRANGE DE ORDEM P
K
() 77
(ii) Continuidade de a(., .). Dado u, v V ,
|a(u, v) = |
u v dx +
u v dx +
uv dx|
|
u v dx| + |
u v dx| + |
uv dx|
L
()
u
L
2
()
v
L
2
()
+ max
i
{
i
()
}u
L
2
()
v
L
2
()
+
L
()
u
L
2
()
v
L
2
()
L
()
u
L
2
()
v
L
2
()
+ C
()
}u
L
2
()
v
L
2
()
+
L
()
u
L
2
()
v
L
2
()
max{
L
()
, C
()
}u
L
2
()
v
L
2
()
+
L
()
u
L
2
()
v
L
2
()
C
a
u
H
1
()
v
H
1
()
,
onde C
a
:= max{
L
()
, C
()
,
L
()
} > 0.
(iii) Coercividade de a(., .). Seja v V ,
a(v, v) =
v v dx +
u v dx +
uv dx
0
v
2
L
2
()
+
0
v
2
L
2
()
v
2
H
1
()
,
onde := min{
0
,
0
}.
Portanto, pelo Theorema de Lax-Milgram, existe um unico u V soluc ao de
(5.4) e
u
H
1
()
L
[H
1
0
()]
= sup
vV, v=0
|L(v)|
v
H
1
0
()
C
f
L
2
()
.
Seja V
h
V denido por
V
h
:= {v
h
C
0
(
) : v
h
|
K
P
k
(K), K T
h
} H
1
0
(),
onde T
h
e uma parti cao do domnio e P
k
(K) e o espaco dos polin omios de ordem
menor ou igual a k sobre o d-simplex K.
Portanto, como (V
h
, (., .)
V
) e um espaco de Hilbert e por V
h
V ser fechado,
temos que o problema:
Achar u
h
V
h
tal que
a(u
h
, v
h
) = L(v
h
), v
h
V
h
(5.5)
tem uma solu cao unica pelo teorema de Lax-Milgram.
78 CAP
ITULO 5. APLICAC
AO DO M
ETODO DE ELEMENTOS FINITOS
Vamos estimar o erro entre u e u
h
soluc oes de (5.4) e (5.5), respectivamente.
Para tanto, seja
I
k
h
: C
0
(
) V
h
,
o interpolante global de Lagrange de ordem k, e assuma a seguinte regularidade:
u H
k+1
() H
1
0
().
Lembre que
u I
k
h
u
L
2
()
+
k+1
m=1
h
m
|u I
k
h
u|
H
m
()
Ch
k+1
|u|
H
k+1
()
.
Recordando a demonstracao do Lema de C`ea, temos
u u
h
2
H
1
0
()
a(u u
h
, u u
h
) (coercividade)
= a(u u
h
, u v
h
+ v
h
u
h
)
= a(u u
h
, u v
h
) +
0
a(u u
h
, v
h
u
h
) (linearidade e ortogonalidade)
= a(u u
h
, u v
h
)
C
a
u u
h
H
1
()
u v
h
H
1
()
, (continuidade)
portanto, usando (ii) e (iii), temos
u u
h
H
1
()
C
a
u v
h
H
1
()
.
Tome v
h
= I
k
h
u, logo
u u
h
H
1
()
C
a
u I
k
h
u
H
1
()
=
C
a
u I
k
h
u
2
L
2
()
+(u I
k
h
u)
2
L
2
()
1/2
C
C
a
h
k+1
|u|
H
k+1
()
+ h
k+11
|u|
H
k+1
()
C
C
a
h
k
|u|
H
k+1
()
.
Observacao 5.2.
O erro converge de forma otima na norma .
H
1
()
, porem nao na norma
.
L
2
()
. Isto e,
(u u
h
)
L
2
()
C
C
a
h
k
u
H
k+1
()
(convergencia otima!);
u u
h
L
2
()
C
C
a
h
k
u
H
k+1
()
(convergencia sub-otima!).
A constant
C
a
depende de , , e como
C
a
=
max{
L
()
, C
()
,
L
()
}
min{
0
,
0
}
.
Logo se 0,
C
a
.
5.1. ELEMENTO FINITO DE LAGRANGE DE ORDEM P
K
() 79
Vamos mostrar que convergencia em .
L
2
()
e de fato otima, se assumimos que
e um domnio convexo. Denimos o seguinte problema, chamado de dual:
_
_
_
Achar H
2
() tal que
L
= u u
h
, em ,
= 0, em ,
(5.6)
onde
L
= () + ,
e chamado de operador adjunto de L. Temos que ||
H
2
()
Cu u
h
L
2
()
, C > 0,
se for convexo. Logo
u u
h
2
L
2
()
= (u u
h
, u u
h
)
L
2
()
= (L
, u u
h
)
L
2
()
= ( () + , u u
h
)
L
2
()
= (, (u u
h
))
L
2
()
0
( n, u u
h
)
L
2
()
+ (, (u u
h
))
L
2
()
0
(, n(u u
h
))
L
2
()
+ (, (u u
h
))
L
2
()
= (, (u u
h
))
L
2
()
+ (, (u u
h
))
L
2
()
+ (, (u u
h
))
L
2
()
= a(u u
h
, )
= a(u u
h
, I
k
h
) (ortogonalidade)
C
a
u u
h
H
1
()
I
k
h
H
1
()
(continuidade)
C
a
C h||
H
2
()
u u
h
H
1
()
. (erro de interpolacao)
Mas, existe C > 0 tal que
||
H
2
()
Cu u
h
L
2
()
,
logo,
u u
h
2
L
2
()
CC
a
hu u
h
L
2
()
u u
h
H
1
()
,
ou seja
u u
h
L
2
()
CC
a
hu u
h
H
1
()
C
C
2
a
h
k+1
|u|
H
k+1
()
.
Teorema 5.1. Seja u H
k+1
() H
1
0
(), onde e convexo, solucao de (5.4) e
k > 0. Seja u
h
solucao de (5.5). Logo, existe C > 0, independente de h, tal que
u u
h
L
2
()
+ h(u u
h
)
L
2
()
Ch
k+1
|u|
H
k+1
()
.
80 CAP
ITULO 5. APLICAC
AO DO M
ETODO DE ELEMENTOS FINITOS
Perguntas:
Como minimizar a dependencia da constante C do theorema acima com relac ao
a , e ?
Esta dependencia e de fato um problema numerico?
Вам также может понравиться
- ESA Edital Verticalizado SargentoДокумент98 страницESA Edital Verticalizado SargentoLucas MartinsОценок пока нет
- Processos de UsinagemДокумент85 страницProcessos de Usinagemwellington848100% (6)
- Matemática para Computação Eds Unip M1 A M4Документ19 страницMatemática para Computação Eds Unip M1 A M4SHIROОценок пока нет
- Matrizes e Vetores em Linguagem CДокумент3 страницыMatrizes e Vetores em Linguagem CSérgio Portari Jr67% (3)
- Analise Estruturas1Документ196 страницAnalise Estruturas1Anderson LopesОценок пока нет
- Apostila MEFДокумент66 страницApostila MEFnhoquimОценок пока нет
- Cálculo I - Fundamentos matemáticosДокумент214 страницCálculo I - Fundamentos matemáticosGabriel PaulinoОценок пока нет
- Apostila - Cálculo 1 SashaДокумент214 страницApostila - Cálculo 1 SashaPaulo Sérgio AlvesОценок пока нет
- Álgebra LinearДокумент120 страницÁlgebra LinearChico CaprarioОценок пока нет
- Pré-CálcuДокумент168 страницPré-CálcuDanielle FerreiraОценок пока нет
- Cálculo Integral, Equações Diferenciais e suas AplicaçõesДокумент137 страницCálculo Integral, Equações Diferenciais e suas AplicaçõesTuane SantosОценок пока нет
- ApontamentosДокумент49 страницApontamentosHelton Damião BiéОценок пока нет
- Lógica ProposicionalДокумент46 страницLógica ProposicionalDiego de FariasОценок пока нет
- Resolução EDOs Séries LaplaceДокумент81 страницаResolução EDOs Séries LaplaceFelipe BorghiОценок пока нет
- Finitos Do Jun FonsecaДокумент90 страницFinitos Do Jun FonsecaMaikson TonattoОценок пока нет
- Introdução à Matemática ComputacionalДокумент37 страницIntrodução à Matemática ComputacionalIsrael AlvesОценок пока нет
- Análise Numérica TeoriaДокумент117 страницAnálise Numérica TeoriaRenan Certa MetrologiaОценок пока нет
- ElementosDeMatematicaDisceta LAbovskyДокумент63 страницыElementosDeMatematicaDisceta LAbovskyelmodai100% (1)
- Métodos EstatísticaДокумент95 страницMétodos EstatísticaJoão Paulo JPОценок пока нет
- SebentaДокумент166 страницSebentaIsa PatricioОценок пока нет
- 043 Notasdeaulaalgebralinearaplicada FalДокумент186 страниц043 Notasdeaulaalgebralinearaplicada FalOdair GuimarãesОценок пока нет
- Cálculo Integral IIДокумент174 страницыCálculo Integral IIRafaelRodriguesОценок пока нет
- Calculo 1Документ57 страницCalculo 1Nathan Nascimento SantosОценок пока нет
- Livro Controle 3Документ110 страницLivro Controle 3Patrick MendesОценок пока нет
- Apostila ToscanoДокумент139 страницApostila ToscanojuliabrainerОценок пока нет
- UFU Cálculo NuméricoДокумент97 страницUFU Cálculo NuméricofvnandoОценок пока нет
- Matdisc StolfiДокумент267 страницMatdisc StolfiGabriel TadeuОценок пока нет
- Notas de Aula de Fundamentos de MatemáticaДокумент292 страницыNotas de Aula de Fundamentos de MatemáticadoglasnegriОценок пока нет
- Notas de Aula de Economia MatemáticaДокумент171 страницаNotas de Aula de Economia MatemáticaEmagrecimento Saudável100% (1)
- Apostila de Calculo II NOVOДокумент114 страницApostila de Calculo II NOVOsylviocoelhoОценок пока нет
- Física Matemática: Sistemas de Coordenadas CurvilíneasДокумент286 страницFísica Matemática: Sistemas de Coordenadas CurvilíneasBenhur A. PossattoОценок пока нет
- Análise Matemática I: Noções topológicas, números complexos e funções reaisДокумент60 страницAnálise Matemática I: Noções topológicas, números complexos e funções reaisEdilson Valente JotteОценок пока нет
- Métodos Probabilísticos para Engenharia e CiênciasДокумент144 страницыMétodos Probabilísticos para Engenharia e CiênciasSara Das Graças SantiagoОценок пока нет
- C Alculo I: Prof. J Org SchleicherДокумент254 страницыC Alculo I: Prof. J Org SchleicherVictor Hugo Santos.Оценок пока нет
- Métodos Numéricos Representação e ErrosДокумент97 страницMétodos Numéricos Representação e ErrosAbelpintoОценок пока нет
- Matemática Básica: operações com números racionaisДокумент76 страницMatemática Básica: operações com números racionaisVitor Eduardo SantosОценок пока нет
- Livropdf Otimização Linear Maculan Fampa (Документ262 страницыLivropdf Otimização Linear Maculan Fampa (pimentelwagnerОценок пока нет
- Cálculo NuméricoДокумент102 страницыCálculo NuméricoAna Maria PereiraОценок пока нет
- Lições de Cálculo MultivariávelДокумент178 страницLições de Cálculo MultivariávelThiago AugustoОценок пока нет
- História dos números complexosДокумент73 страницыHistória dos números complexosfockewulОценок пока нет
- RotacionalДокумент190 страницRotacionalemilioabreuОценок пока нет
- Cálculo II - Exercícios de ApoioДокумент59 страницCálculo II - Exercícios de ApoioTiago LuzОценок пока нет
- Alexandre Nolasco de Carvalho - AnaliseIIДокумент187 страницAlexandre Nolasco de Carvalho - AnaliseIIAndrey FerreiraОценок пока нет
- Cálculo vetorial e séries: integração múltiplaДокумент220 страницCálculo vetorial e séries: integração múltiplaPedro Igor100% (2)
- ApostilaДокумент147 страницApostilaKamilla RodriguesОценок пока нет
- Discret AДокумент168 страницDiscret AAbrãoОценок пока нет
- Cálculo Numérico - Introdução à Matemática ComputacionalДокумент100 страницCálculo Numérico - Introdução à Matemática ComputacionalDário MacedoОценок пока нет
- Calc Numerico - Maio2014 - LNA PDFДокумент100 страницCalc Numerico - Maio2014 - LNA PDFAdilson NeponucenoОценок пока нет
- E Let Ro Magnetism o ScriptДокумент376 страницE Let Ro Magnetism o ScriptSadoque PB100% (2)
- Manual Básico De Quatérnios E Rotações 3d Com MatlabОт EverandManual Básico De Quatérnios E Rotações 3d Com MatlabОценок пока нет
- Um Primeiro Curso Direto De Calculo Diferencial E IntegralОт EverandUm Primeiro Curso Direto De Calculo Diferencial E IntegralОценок пока нет
- Algoritmos Em CОт EverandAlgoritmos Em CОценок пока нет
- Controle de sistemas por computador: projeto e identificaçãoОт EverandControle de sistemas por computador: projeto e identificaçãoОценок пока нет
- Edital PIBITI #57-13 de 21 de Maio de 2013Документ18 страницEdital PIBITI #57-13 de 21 de Maio de 2013ErnaneufuОценок пока нет
- 6 - Análise de RegressãoДокумент22 страницы6 - Análise de RegressãodanilocutiОценок пока нет
- Edital BIC-JR N°58-13 de 21 de Maio de 2013Документ23 страницыEdital BIC-JR N°58-13 de 21 de Maio de 2013ErnaneufuОценок пока нет
- Eng Superficie 1 2010Документ50 страницEng Superficie 1 2010psblimaОценок пока нет
- TabelaДокумент2 страницыTabelaErnaneufuОценок пока нет
- ApostilaElementosFinitos - Calor Elemento Triangular PDFДокумент40 страницApostilaElementosFinitos - Calor Elemento Triangular PDFVitor Folador GonçalvesОценок пока нет
- Aula 11 Materiais CeramicosДокумент57 страницAula 11 Materiais CeramicosErnaneufuОценок пока нет
- Ementas DisciplinasДокумент32 страницыEmentas DisciplinasErnaneufuОценок пока нет
- Tratamentos Térmicos1Документ67 страницTratamentos Térmicos1Gustavo MendesОценок пока нет
- Sonda de 4 Pontas - Muito Import AnteДокумент9 страницSonda de 4 Pontas - Muito Import AnteCássio SoaresОценок пока нет
- 58 1 A GT8 - Souza - Ta PDFДокумент17 страниц58 1 A GT8 - Souza - Ta PDFmalaneapolonioОценок пока нет
- Introdução aos Processos EstocásticosДокумент15 страницIntrodução aos Processos EstocásticosTamara CostaОценок пока нет
- Aplicacao de Integral Tripla 1Документ12 страницAplicacao de Integral Tripla 1Horacio JuniorОценок пока нет
- Conteúdos por avaliação 6o ao 9o ano segundo planejamento didáticoДокумент2 страницыConteúdos por avaliação 6o ao 9o ano segundo planejamento didáticoAna JuliaОценок пока нет
- Análise de transferências entre cursos com matrizДокумент5 страницAnálise de transferências entre cursos com matrizrogerioigancioОценок пока нет
- Curso Estatística BásicaДокумент71 страницаCurso Estatística BásicaGeval EnergiaОценок пока нет
- Física III - Primeira Prova de Múltipla Escolha e Cálculo de Cargas ElétricasДокумент4 страницыFísica III - Primeira Prova de Múltipla Escolha e Cálculo de Cargas ElétricasJuliane RochaОценок пока нет
- Livro EDO (Reginaldo J Santos) UFMG2009Документ600 страницLivro EDO (Reginaldo J Santos) UFMG2009boypaiОценок пока нет
- Modelagem Matematica - Uma Investigacao PDFДокумент385 страницModelagem Matematica - Uma Investigacao PDFFelipeapalexandОценок пока нет
- GrelhasДокумент5 страницGrelhasroneykzОценок пока нет
- M8 1bim Aluno 2017 PDFДокумент48 страницM8 1bim Aluno 2017 PDFTh1Ag0BRKSОценок пока нет
- mx8 Relacao Temas Capacidades ExerciciosДокумент6 страницmx8 Relacao Temas Capacidades ExerciciosanachiorОценок пока нет
- Estatística Aplicada à Negócios I - Funções de Probabilidade, Esperança e VariânciaДокумент87 страницEstatística Aplicada à Negócios I - Funções de Probabilidade, Esperança e VariânciaMarceloOliveiraFlaОценок пока нет
- (Aula 2) Razão e ProporçãoДокумент37 страниц(Aula 2) Razão e ProporçãoFred TavaresОценок пока нет
- AlfaCon PDFДокумент3 страницыAlfaCon PDFDavid WillianОценок пока нет
- Programacao Linear e Algumas Extensoes - Adilia Oliveira Neves RafaelДокумент76 страницProgramacao Linear e Algumas Extensoes - Adilia Oliveira Neves RafaelGershon ManjoloОценок пока нет
- Origem da escrita e numeração na Babilônia e Egito antigoДокумент25 страницOrigem da escrita e numeração na Babilônia e Egito antigoÉrica BatistaОценок пока нет
- Circulo ApolonioДокумент3 страницыCirculo ApolonioFilipe CaceresОценок пока нет
- Resolução de equações do 2o grau e problemas de MatemáticaДокумент3 страницыResolução de equações do 2o grau e problemas de MatemáticaSara FrancoОценок пока нет
- Ae Nmsi6 Ficha Va 2Документ3 страницыAe Nmsi6 Ficha Va 2jlmreisОценок пока нет
- Aula 11 v1Документ100 страницAula 11 v1Neusa Helena Da Silva RodriguesОценок пока нет
- Ava 2Документ3 страницыAva 2Pedro RodriguesОценок пока нет
- Planejamento 32 SemanasДокумент42 страницыPlanejamento 32 SemanasJudson SilvaОценок пока нет
- Análise de dados e finançasДокумент3 страницыAnálise de dados e finançasAndre BritoОценок пока нет
- A Geometria Do Futebol - MESTRADOДокумент20 страницA Geometria Do Futebol - MESTRADOBárbara NunesОценок пока нет
- Velocidade média e taxa de variação em função do tempoДокумент9 страницVelocidade média e taxa de variação em função do tempoCarla CostaОценок пока нет
- Eletiva Matematica BásicaДокумент53 страницыEletiva Matematica BásicatiagotgmatОценок пока нет