Вам также может понравиться
- What Is A Variable Frequency Drive? How Does A VFD Work?Документ6 страницWhat Is A Variable Frequency Drive? How Does A VFD Work?S.M.Touhidur RahmanОценок пока нет
- VFD Rebate Dsire: What Is A VFD?Документ35 страницVFD Rebate Dsire: What Is A VFD?Stephen Rey CaldeaОценок пока нет
- Electric Drives: Drive BasicsДокумент5 страницElectric Drives: Drive BasicsJisha KuruvillaОценок пока нет
- Variable Frequency DriveДокумент12 страницVariable Frequency Drive-Danielle DimitrovaОценок пока нет
- Figure 1. Simple VFD / Fan ApplicationДокумент7 страницFigure 1. Simple VFD / Fan ApplicationTapas PalОценок пока нет
- Technical Note: What Is A VFD?Документ4 страницыTechnical Note: What Is A VFD?mdkhandaveОценок пока нет
- DC DrivesДокумент10 страницDC DrivesEuoshy HussainОценок пока нет
- Regenerative Braking of Induction MotorДокумент27 страницRegenerative Braking of Induction MotorcoolkannaОценок пока нет
- Ac MotorsДокумент17 страницAc MotorsPineappleJamОценок пока нет
- Drives and SoftstarterДокумент7 страницDrives and SoftstarterElectrification100% (1)
- Four Quadrant Speed Control of DC Motor Using ChopperДокумент5 страницFour Quadrant Speed Control of DC Motor Using ChopperismayilcОценок пока нет
- IDC Unit-4Документ9 страницIDC Unit-4Gaurav SinghОценок пока нет
- Voltage and Current Equation of A Shunt Wound DC MotorДокумент4 страницыVoltage and Current Equation of A Shunt Wound DC MotorBangla BashОценок пока нет
- AC MotorДокумент18 страницAC MotorCathy IsraelОценок пока нет
- Motors Convert Electric Energy To Mechanical MotionДокумент9 страницMotors Convert Electric Energy To Mechanical MotionwissamhijaziОценок пока нет
- TP2-Satya PrakashДокумент13 страницTP2-Satya Prakashm_azhagarОценок пока нет
- XLecture 7 - DC DrivesДокумент29 страницXLecture 7 - DC DrivesমোঃওমরফারুকОценок пока нет
- Induction Motor Braking Regenerative Plugging Dynamic Braking of Induction MotorДокумент9 страницInduction Motor Braking Regenerative Plugging Dynamic Braking of Induction MotorRajeev ValunjkarОценок пока нет
- Tutorial 3 19BME069Документ14 страницTutorial 3 19BME06920BME005 INAM SABRIОценок пока нет
- VVVF - Working Principle & Its OperationДокумент18 страницVVVF - Working Principle & Its Operationdownload4sumitОценок пока нет
- Electric DrivesДокумент35 страницElectric Drivesbabli.panchal1984Оценок пока нет
- Single Phase MotorДокумент32 страницыSingle Phase MotorsnzaimahОценок пока нет
- Chapter 1: IntroductionДокумент118 страницChapter 1: Introductionrizwan_adilОценок пока нет
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFДокумент6 страницPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniОценок пока нет
- AC Drives and Soft Starter Application Guide - AllenBradleyCoДокумент5 страницAC Drives and Soft Starter Application Guide - AllenBradleyCojoyama100% (1)
- AC Machine 4Документ35 страницAC Machine 4Fadhil A. HasanОценок пока нет
- A.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryДокумент5 страницA.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryCønstäh Van Der WüppertälärîanskíhОценок пока нет
- 2365 02 l2 202 Handout 25Документ2 страницы2365 02 l2 202 Handout 25dvm4yfptzmОценок пока нет
- Motors and DrivesДокумент23 страницыMotors and DrivesharishkumarsinghОценок пока нет
- AC Drive Theory and Application: Benefits of Using AC DrivesДокумент8 страницAC Drive Theory and Application: Benefits of Using AC DrivesRaghu KodiОценок пока нет
- EEE 321 Marking SchemeДокумент8 страницEEE 321 Marking Schemefaisal sbennaОценок пока нет
- Nema Design Code For MotorsДокумент8 страницNema Design Code For MotorsMani KumarОценок пока нет
- Eee 321Документ7 страницEee 321faisal sbennaОценок пока нет
- The Voltech Handbook of PWM Motor DrivesДокумент53 страницыThe Voltech Handbook of PWM Motor DrivesPovaS100% (1)
- Motor Fundamentals PDFДокумент12 страницMotor Fundamentals PDFrajeshpalla4uОценок пока нет
- Three-Phase Squirrel-Cage Induction Motor Drive Analysis Using LabVIEWДокумент26 страницThree-Phase Squirrel-Cage Induction Motor Drive Analysis Using LabVIEWCarlos Roberto Amaya Rodriguez100% (1)
- 1-Phase Induction MotorДокумент20 страниц1-Phase Induction MotorNure AlamОценок пока нет
- 4.1 DC Motor SpecificationДокумент6 страниц4.1 DC Motor SpecificationAsgher KhattakОценок пока нет
- Course Notes - AC MOTORДокумент21 страницаCourse Notes - AC MOTORHarold DuranoОценок пока нет
- DriveMotorBasics01 PDFДокумент11 страницDriveMotorBasics01 PDFSundar Kumar Vasantha GovindarajuluОценок пока нет
- Fundamentals OF Polyphase Electric MotorsДокумент12 страницFundamentals OF Polyphase Electric Motors1960maocОценок пока нет
- EES (Lec20)Документ16 страницEES (Lec20)Muhammad SagheerОценок пока нет
- Ac Drive: FundamentalsДокумент45 страницAc Drive: FundamentalsShivaji ThubeОценок пока нет
- Question Bank SSD EaswariEnggДокумент46 страницQuestion Bank SSD EaswariEnggmenakaОценок пока нет
- Part II - AC MotorsДокумент30 страницPart II - AC MotorsYan Liang HaoОценок пока нет
- Em - 16 MarksДокумент14 страницEm - 16 MarkskesavantОценок пока нет
- Direct Torque Control (DTC) in Induction Motor: M.G.MorshadДокумент12 страницDirect Torque Control (DTC) in Induction Motor: M.G.MorshadAdil FarzandОценок пока нет
- How It Works?Документ2 страницыHow It Works?Lina M. Abd ElSalamОценок пока нет
- Motors: Ratings and SpecificationsДокумент8 страницMotors: Ratings and SpecificationsSoumen BanerjeeОценок пока нет
- Four Quadrant OperationДокумент9 страницFour Quadrant OperationMOTILAL SUTHAR215291Оценок пока нет
- Induction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFДокумент7 страницInduction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFbalajiОценок пока нет
- Imp Questions EdДокумент2 страницыImp Questions EdUmang MewaraОценок пока нет
- Brushless DC MotorДокумент13 страницBrushless DC MotorYova PrameswariОценок пока нет
- Braking Schemes of TractionДокумент7 страницBraking Schemes of TractionSuraj BhushanОценок пока нет
- Name: Maturan, Renz Myko B. Date: November 28, 2022 Subject & Section: EE 330 AC/DC Machineries - CДокумент7 страницName: Maturan, Renz Myko B. Date: November 28, 2022 Subject & Section: EE 330 AC/DC Machineries - CRenz MykoОценок пока нет
- Electrical Machines: Lecture Notes for Electrical Machines CourseОт EverandElectrical Machines: Lecture Notes for Electrical Machines CourseОценок пока нет
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetРейтинг: 2 из 5 звезд2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОценок пока нет
- Solenoid ValveДокумент9 страницSolenoid ValveNitish DhawanОценок пока нет
- Here My Own Quotes, Shayri, Lyrics & Rhymes (Pen Name-Andy) - Nitish Dhawan (ND)Документ3 страницыHere My Own Quotes, Shayri, Lyrics & Rhymes (Pen Name-Andy) - Nitish Dhawan (ND)Nitish DhawanОценок пока нет
- Handout PEST AnalysisДокумент6 страницHandout PEST AnalysisSundas KhanОценок пока нет
- 715 Loop Calibrators DSДокумент2 страницы715 Loop Calibrators DSNitish DhawanОценок пока нет
- Managerial EconomicsДокумент2 страницыManagerial EconomicsNitish DhawanОценок пока нет
- Economies of Scope and The Learning CurveДокумент7 страницEconomies of Scope and The Learning CurveNitish DhawanОценок пока нет
- Loyalty Program Retail Mba Report @lifestyleДокумент34 страницыLoyalty Program Retail Mba Report @lifestyleNitish Dhawan100% (1)
- Carinthia Katalog DownloadДокумент16 страницCarinthia Katalog DownloadOperator_010100% (2)
- EXCEL For Pump DesignДокумент2 страницыEXCEL For Pump Designkad-7Оценок пока нет
- The Indian & The SnakeДокумент3 страницыThe Indian & The SnakeashvinОценок пока нет
- English Class Vii PDFДокумент101 страницаEnglish Class Vii PDFpannapurohitОценок пока нет
- Child DevelopmentДокумент15 страницChild Development4AndreeaОценок пока нет
- Bravo MRI II Operation ManualДокумент45 страницBravo MRI II Operation ManualLuis100% (1)
- Bulk Material/Part Ppap Process Checklist / Approval: Required?Документ32 страницыBulk Material/Part Ppap Process Checklist / Approval: Required?krds chidОценок пока нет
- Surface Finish Measurement NotesДокумент32 страницыSurface Finish Measurement NotesAneez ShresthaОценок пока нет
- Beastlikebalsam - Muscle BuildingДокумент10 страницBeastlikebalsam - Muscle BuildingBalsam LaaroussiОценок пока нет
- ACR39U-U1: (USB Type A) Smart Card ReaderДокумент8 страницACR39U-U1: (USB Type A) Smart Card Readersuraj18in4uОценок пока нет
- Basics of Population EducationДокумент4 страницыBasics of Population EducationLAILANIE DELA PENAОценок пока нет
- 23001864Документ15 страниц23001864vinodsrawat33.asiОценок пока нет
- Reading Part 2Документ14 страницReading Part 2drama channelОценок пока нет
- Phrasal Verbs Related To HealthДокумент2 страницыPhrasal Verbs Related To HealthKnuckles El Naco Narco LechugueroОценок пока нет
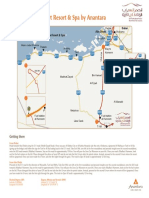
- Qasr Al Sarab Desert Resort Location Map June2012Документ1 страницаQasr Al Sarab Desert Resort Location Map June2012Anant GârgОценок пока нет
- Hypothesis Testing - IДокумент36 страницHypothesis Testing - Isai revanthОценок пока нет
- Medical GeneticsДокумент4 страницыMedical GeneticsCpopОценок пока нет
- 3397 - Ciat LDC 300VДокумент71 страница3397 - Ciat LDC 300VPeradОценок пока нет
- Pharmalytica Exhibitor List 2023Документ3 страницыPharmalytica Exhibitor List 2023Suchita PoojaryОценок пока нет
- OPTCL-Fin-Bhw-12Документ51 страницаOPTCL-Fin-Bhw-12Bimal Kumar DashОценок пока нет
- Arts Class: Lesson 01Документ24 страницыArts Class: Lesson 01Lianne BryОценок пока нет
- Metaphysics of LucretiusДокумент6 страницMetaphysics of LucretiusChristopher BennettОценок пока нет
- 1 s2.0 S1110016815000563 Main PDFДокумент13 страниц1 s2.0 S1110016815000563 Main PDFvale1299Оценок пока нет
- Regression Analysis Random Motors ProjectДокумент22 страницыRegression Analysis Random Motors ProjectPrateek AgrawalОценок пока нет
- Chillers VoltasДокумент4 страницыChillers Voltasanil shuklaОценок пока нет
- Pusheen With Donut: Light Grey, Dark Grey, Brown, RoséДокумент13 страницPusheen With Donut: Light Grey, Dark Grey, Brown, RosémafaldasОценок пока нет
- Cold Regions Science and TechnologyДокумент8 страницCold Regions Science and TechnologyAbraham SilesОценок пока нет
- MC MATH 01 Syllabus SJCCДокумент11 страницMC MATH 01 Syllabus SJCCAcire NonacОценок пока нет
- Karl MarxДокумент4 страницыKarl Marxeirvine noah isidroОценок пока нет
- Smart Grid TechnologyДокумент43 страницыSmart Grid Technologyarnav LakshkarОценок пока нет