Вам также может понравиться
- Suma de Vectores Por El Método Gráfico FisicaДокумент4 страницыSuma de Vectores Por El Método Gráfico FisicaJeniPresaОценок пока нет
- Teoria de Suma y Resta de VectoresДокумент11 страницTeoria de Suma y Resta de VectoresMariela Morato0% (1)
- Vector EsДокумент11 страницVector Eslop13165Оценок пока нет
- VectoresДокумент9 страницVectoresJona LunaОценок пока нет
- Ley Del ParalelogramoДокумент13 страницLey Del ParalelogramoEli SuarezОценок пока нет
- Operaciones Básicas de VectoresДокумент6 страницOperaciones Básicas de VectoresItzel Vasquez CarreraОценок пока нет
- Trabajo de MatematicaДокумент21 страницаTrabajo de MatematicaRaul Antonio Marin MarcanoОценок пока нет
- Valor Absoluto y Propiedades de Las DesigualdadesДокумент16 страницValor Absoluto y Propiedades de Las DesigualdadesGregorio CasasОценок пока нет
- Vectores MatematicasДокумент17 страницVectores MatematicasCIBER CENTERОценок пока нет
- VectoresДокумент4 страницыVectoresAndrés SanchezОценок пока нет
- VectorДокумент8 страницVectorSimon SalasОценок пока нет
- VectoresДокумент7 страницVectoresMercedes RoblesОценок пока нет
- Vectores - TeoríaДокумент70 страницVectores - TeoríaROGELIO SANTOS MAMANI QUISPEОценок пока нет
- Glosario 1. 1roalbДокумент51 страницаGlosario 1. 1roalbEvelyn LasluisaОценок пока нет
- VectoresДокумент23 страницыVectoresivanrodriguezgomez2007Оценок пока нет
- Contenidos Vectores y EscalaresДокумент10 страницContenidos Vectores y EscalaresPauQuezadaLeonОценок пока нет
- Geometria AnaliticaДокумент73 страницыGeometria AnaliticaAdo BlonsterОценок пока нет
- Multiplicacion de TensoresДокумент12 страницMultiplicacion de TensoresEduardo Estrada100% (1)
- Final AlgebraДокумент26 страницFinal AlgebraArea educ amb IfdcvmОценок пока нет
- MetodosДокумент19 страницMetodosEliana Margarita Suarez SalasОценок пока нет
- Guia 4 Cantidades Vectoriales y EscalaresДокумент12 страницGuia 4 Cantidades Vectoriales y Escalaresximena94Оценок пока нет
- D.6 Suma de VectoresДокумент5 страницD.6 Suma de Vectoresandres rosalesОценок пока нет
- Parametrizacion RectaДокумент4 страницыParametrizacion RectafranciscoОценок пока нет
- Vectores y EscalaresДокумент24 страницыVectores y EscalaresmalbejimОценок пока нет
- Fisica Primer MomentoДокумент19 страницFisica Primer MomentoJsn DkОценок пока нет
- Proyecto TrabajoДокумент13 страницProyecto TrabajoJP PIVO FFОценок пока нет
- Tarea 1 Física.Документ14 страницTarea 1 Física.IRELA DEYANIRA FONG OJEDAОценок пока нет
- Investigacion de Matrices InversasДокумент11 страницInvestigacion de Matrices InversasMilton REZEОценок пока нет
- Vectores en El Plano y en El Espacio (Original)Документ16 страницVectores en El Plano y en El Espacio (Original)Ayis Sche100% (1)
- Foro PDFДокумент10 страницForo PDFDiegopa RubianoОценок пока нет
- Vectores 2Документ9 страницVectores 2Juan Jose Perez CastroОценок пока нет
- Teoria VectoresДокумент5 страницTeoria VectoresFrank GarciaОценок пока нет
- Temario Razonamiento Matematico PaaДокумент69 страницTemario Razonamiento Matematico PaaIseela ChoiОценок пока нет
- VectoresДокумент4 страницыVectoresFernando SinayОценок пока нет
- Sesion 3 - 4Документ44 страницыSesion 3 - 4JUAN ATO PEÑAОценок пока нет
- Suma de VectoresДокумент17 страницSuma de Vectoresjose luis monОценок пока нет
- Algebra LinealДокумент12 страницAlgebra LinealHans ChamorroОценок пока нет
- Produccion Final Algebra Lineal 1Документ13 страницProduccion Final Algebra Lineal 1Rocio SantanaОценок пока нет
- Suma y Resta de Vectores UCE EstudioДокумент7 страницSuma y Resta de Vectores UCE EstudioEmily LopezОценок пока нет
- Magnitudes VectorialesДокумент52 страницыMagnitudes VectorialesEnriqe PuentesОценок пока нет
- Repaso Algebra LinealДокумент2 страницыRepaso Algebra LinealAlejandro NuñezОценок пока нет
- Operaciones Con VectoresДокумент7 страницOperaciones Con Vectoresefren ayalaОценок пока нет
- Lab 01Документ12 страницLab 01Maicol Isaac Pereira CastellanosОценок пока нет
- Vectores Uni 2022Документ22 страницыVectores Uni 2022Perla Martínez ChávezОценок пока нет
- FISICAДокумент8 страницFISICAAngui BasurtoОценок пока нет
- Qué Es La Matriz Inversa o La Inversa de Una Matriz Este Es El BuenoДокумент11 страницQué Es La Matriz Inversa o La Inversa de Una Matriz Este Es El BuenoJose MartinezОценок пока нет
- Vectores MarendiДокумент6 страницVectores MarendiMardoqueoRamos93Оценок пока нет
- VECTORESДокумент16 страницVECTORESclaudia espinozaОценок пока нет
- VectorДокумент18 страницVectorJulio Cesar Garcia CananОценок пока нет
- VectorДокумент13 страницVectorJavier RomeroОценок пока нет
- Propiedades de Los DeterminantesДокумент12 страницPropiedades de Los Determinantesayrton_fbc1Оценок пока нет
- Geometria de Pares OrdenadosДокумент26 страницGeometria de Pares OrdenadosBrisa treysi Arosi AquinoОценок пока нет
- Matriz InversaДокумент14 страницMatriz InversabernardoОценок пока нет
- Campos Escalares o Funciones MultivariablesДокумент29 страницCampos Escalares o Funciones MultivariablesKENDY VALENTINA CARPIO ALFAROОценок пока нет
- Qué Son Los VectoresДокумент8 страницQué Son Los VectoresMàx RomeroОценок пока нет
- Manual de Introducción A Matlab PDFДокумент26 страницManual de Introducción A Matlab PDFSabino HectorCamposОценок пока нет
- Tutorial Matlab..EspanolДокумент101 страницаTutorial Matlab..Espanolhernandez5Оценок пока нет
- Actividad 8Документ1 страницаActividad 8David BolОценок пока нет
- Conceptos de RadiofrecuenciaДокумент20 страницConceptos de Radiofrecuencia19920921Оценок пока нет
- Clase InstДокумент29 страницClase InstDavid BolОценок пока нет
- Tutorial Matlab..EspanolДокумент101 страницаTutorial Matlab..Espanolhernandez5Оценок пока нет
- Manual Visual Basic - Guía Del Estudiante (Español)Документ606 страницManual Visual Basic - Guía Del Estudiante (Español)Carlos Osechas50% (2)
- Temas SelectosДокумент16 страницTemas SelectosDavid BolОценок пока нет
- Formato CfeДокумент2 страницыFormato Cfehomertrix-neo130564% (22)
- Clase 1Документ18 страницClase 1David BolОценок пока нет
- Manual para El Servicio Publico de Energia Electrica PDFДокумент11 страницManual para El Servicio Publico de Energia Electrica PDFDavid BolОценок пока нет
- Temas SelectosДокумент16 страницTemas SelectosDavid BolОценок пока нет
- Clase Tipos de Materiales1Документ42 страницыClase Tipos de Materiales1David BolОценок пока нет
- Reglas de MatricesДокумент5 страницReglas de MatricesDavid BolОценок пока нет
- Propiedades MagnéticasДокумент13 страницPropiedades MagnéticasDavid BolОценок пока нет
- Presentacion de OndasДокумент10 страницPresentacion de OndasDavid BolОценок пока нет
- CorrosionДокумент19 страницCorrosionDavid BolОценок пока нет
- PresentacДокумент6 страницPresentacDavid BolОценок пока нет
- Sistemas de ControlДокумент10 страницSistemas de ControlalexrondonОценок пока нет
- Primera Parte de La ClaseДокумент8 страницPrimera Parte de La ClaseDavid BolОценок пока нет
- Primer Parcial ResueltoДокумент37 страницPrimer Parcial ResueltoDavid BolОценок пока нет
- Apuntes Señales y Sistemas yДокумент12 страницApuntes Señales y Sistemas yBRAYAN DANILO ORTIZ BELTRANОценок пока нет
- MatemáticasДокумент17 страницMatemáticasJuan Carlos SantibáñezОценок пока нет
- Division Algebraica PDFДокумент9 страницDivision Algebraica PDFfelix raulОценок пока нет
- Locura Parabólica - El - Pi - de Las Parábolas - GaussianosДокумент14 страницLocura Parabólica - El - Pi - de Las Parábolas - GaussianosJeffrey LewisОценок пока нет
- TEMA Matematicas para RSA PDFДокумент39 страницTEMA Matematicas para RSA PDFUrban palaОценок пока нет
- Tema 11Документ26 страницTema 11Takeshi STОценок пока нет
- Lab 3 CALVДокумент15 страницLab 3 CALVAndres Felipe HernandezОценок пока нет
- Geometria - Analitica (1) - 220711 - 093222Документ70 страницGeometria - Analitica (1) - 220711 - 093222JezzyОценок пока нет
- Derivadas HiperbolicasДокумент3 страницыDerivadas HiperbolicasJhonny Chugá MejìaОценок пока нет
- Algebra LinealДокумент2 страницыAlgebra LinealMILKAR NEIRA RUIZОценок пока нет
- 2.3 Funcion Cuadratica Parte 1Документ12 страниц2.3 Funcion Cuadratica Parte 1Eliana JENIFER CY.Оценок пока нет
- Guía de Matemática IIIsbsjjsjsnnДокумент250 страницGuía de Matemática IIIsbsjjsjsnnLubi Diaz Navarrete50% (2)
- Presentación 1Документ52 страницыPresentación 1Jefferson Heli Reyes CardenasОценок пока нет
- Matriz IdempotenteДокумент11 страницMatriz IdempotenteINES RODRIGUEZ VILCAОценок пока нет
- Syllabus Analisis de Fourier WaveletsДокумент10 страницSyllabus Analisis de Fourier WaveletsJose Miguel ChacónОценок пока нет
- Entregable2 - Hernandez Bautista Juan Daniel 2Документ16 страницEntregable2 - Hernandez Bautista Juan Daniel 2Daniel BautistaОценок пока нет
- Ecuaciones Diferenciales de Primer OrdenДокумент41 страницаEcuaciones Diferenciales de Primer OrdenJuan Carlos Bejarano CuestaОценок пока нет
- LogicaДокумент29 страницLogicaMIGUEL ONCOY CORDOVAОценок пока нет
- Cónicas. La ParabolaДокумент5 страницCónicas. La ParabolaNoel RodriguezОценок пока нет
- MATEMATICAДокумент23 страницыMATEMATICARafo OrtizОценок пока нет
- Coordenadas y Matrices HomogéneasДокумент1 страницаCoordenadas y Matrices HomogéneasManuel JuarezОценок пока нет
- Ejercicio 41 - 1Документ3 страницыEjercicio 41 - 1jonatan juarezОценок пока нет
- Taller Transformaciones de FuncionesДокумент20 страницTaller Transformaciones de FuncionesSebastián NiñoОценок пока нет
- L1 LM 6PДокумент42 страницыL1 LM 6PGuido OrlandoОценок пока нет
- Tema 4 - Matemática 2 - 2020 IДокумент6 страницTema 4 - Matemática 2 - 2020 IGiovanny David Carpio QuispeОценок пока нет
- CepreUni Final 2020 IДокумент1 страницаCepreUni Final 2020 IFelipe GallegosОценок пока нет
- Practica9 LCA1 ScilabДокумент12 страницPractica9 LCA1 ScilabThethinker RudolfОценок пока нет
- Entrega Matematicas Semana 3Документ6 страницEntrega Matematicas Semana 3Fernando Cantillo100% (2)
- Geometría Semana.5Документ5 страницGeometría Semana.5clara valdivianoОценок пока нет
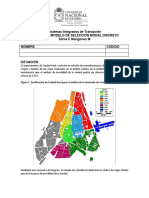
- Taller 5 Modelo de Selección Modal Discreto PDFДокумент3 страницыTaller 5 Modelo de Selección Modal Discreto PDFdaniel caraballo hernandezОценок пока нет