Вам также может понравиться
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- TAB Procedures From An Engineering FirmДокумент18 страницTAB Procedures From An Engineering Firmtestuser180Оценок пока нет
- 9zero Liquid Discharge Plant - Multiple Effect Evaporator-Khatav PDFДокумент29 страниц9zero Liquid Discharge Plant - Multiple Effect Evaporator-Khatav PDFहरिओम हरी100% (2)
- Module 5 Data Collection Presentation and AnalysisДокумент63 страницыModule 5 Data Collection Presentation and AnalysisAngel Vera CastardoОценок пока нет
- 1934 PARIS AIRSHOW REPORT - Part1 PDFДокумент11 страниц1934 PARIS AIRSHOW REPORT - Part1 PDFstarsalingsoul8000Оценок пока нет
- Deed of Assignment CorporateДокумент4 страницыDeed of Assignment CorporateEric JayОценок пока нет
- HSBC in A Nut ShellДокумент190 страницHSBC in A Nut Shelllanpham19842003Оценок пока нет
- Hariom ReportДокумент60 страницHariom Reportहरिओम हरी100% (2)
- Exercise 6 ElectrowinningДокумент2 страницыExercise 6 Electrowinningहरिओम हरी100% (4)
- Exercise 6 ElectrowinningДокумент2 страницыExercise 6 Electrowinningहरिओम हरी100% (4)
- 09 WA500-3 Shop ManualДокумент1 335 страниц09 WA500-3 Shop ManualCristhian Gutierrez Tamayo93% (14)
- Optimal Reactive Extraction of Valeric Acid From Aqueous Solutions Using Tri-N-Propyl Amine/diluent and Dibenzyl Amine/diluent SystemsДокумент14 страницOptimal Reactive Extraction of Valeric Acid From Aqueous Solutions Using Tri-N-Propyl Amine/diluent and Dibenzyl Amine/diluent Systemsहरिओम हरीОценок пока нет
- Optimum Brochure EmailДокумент4 страницыOptimum Brochure Emailहरिओम हरीОценок пока нет
- Experimental and Analytical Study of Effect of Forced Convectional Cooling of Bus Duct System in The Prediction of Temperature RiseДокумент8 страницExperimental and Analytical Study of Effect of Forced Convectional Cooling of Bus Duct System in The Prediction of Temperature Riseहरिओम हरीОценок пока нет
- Design and Construction of A Spiral Heat Exchanger: Jamshid Khorshidi, Salman HeidariДокумент8 страницDesign and Construction of A Spiral Heat Exchanger: Jamshid Khorshidi, Salman Heidariहरिओम हरीОценок пока нет
- Optimization of Heat Transfer and Pressure Drop Characteristics Via Air Bubble Injection Inside A Shell and Coiled Tube Heat ExchangerДокумент9 страницOptimization of Heat Transfer and Pressure Drop Characteristics Via Air Bubble Injection Inside A Shell and Coiled Tube Heat Exchangerहरिओम हरीОценок пока нет
- 4 Ankur Goyal MMTC PampДокумент23 страницы4 Ankur Goyal MMTC Pampहरिओम हरीОценок пока нет
- Applied Thermal Engineering: Tomasz MuszynskiДокумент11 страницApplied Thermal Engineering: Tomasz Muszynskiहरिओम हरीОценок пока нет
- Design and Fabrication of Shell and Tube Heat Exchanger For Practical ApplicationsДокумент10 страницDesign and Fabrication of Shell and Tube Heat Exchanger For Practical Applicationsहरिओम हरीОценок пока нет
- Thermodynamics of Ag CL H, O, Ag BR H, OДокумент9 страницThermodynamics of Ag CL H, O, Ag BR H, Oहरिओम हरीОценок пока нет
- (The Minerals, Metals & Materials Series) Marc André Meyers Et Al. (Eds.) - Proceedings of The 3rd Pan American Materials Congress-Springer (2017) PDFДокумент790 страниц(The Minerals, Metals & Materials Series) Marc André Meyers Et Al. (Eds.) - Proceedings of The 3rd Pan American Materials Congress-Springer (2017) PDFहरिओम हरीОценок пока нет
- Chemical Reactor Modeling - Lecture 7Документ4 страницыChemical Reactor Modeling - Lecture 7हरिओम हरीОценок пока нет
- CH 6130: Optimization Techniques: Assignment # 3 Submission Date: March 31, 2013Документ1 страницаCH 6130: Optimization Techniques: Assignment # 3 Submission Date: March 31, 2013हरिओम हरीОценок пока нет
- Effect of Shape & Orientation of Heated Objects On Free Convection in Power-Law FluidsДокумент1 страницаEffect of Shape & Orientation of Heated Objects On Free Convection in Power-Law Fluidsहरिओम हरीОценок пока нет
- Dynamic Relaxation: A New Optimization Method For PEM Fuel Cell AnalysisДокумент6 страницDynamic Relaxation: A New Optimization Method For PEM Fuel Cell Analysisहरिओम हरीОценок пока нет
- Phase 1: API Lifecycle (2 Days)Документ3 страницыPhase 1: API Lifecycle (2 Days)DevendraОценок пока нет
- Missouri Courts Appellate PracticeДокумент27 страницMissouri Courts Appellate PracticeGeneОценок пока нет
- Maths PDFДокумент3 страницыMaths PDFChristina HemsworthОценок пока нет
- Basic DfwmacДокумент6 страницBasic DfwmacDinesh Kumar PОценок пока нет
- Dry Canyon Artillery RangeДокумент133 страницыDry Canyon Artillery RangeCAP History LibraryОценок пока нет
- Material Safety Data Sheet (According To 91/155 EC)Документ4 страницыMaterial Safety Data Sheet (According To 91/155 EC)Jaymit PatelОценок пока нет
- STM - Welding BookДокумент5 страницSTM - Welding BookAlvin MoollenОценок пока нет
- BYJU's July PayslipДокумент2 страницыBYJU's July PayslipGopi ReddyОценок пока нет
- Professional Regula/on Commission: Clarita C. Maaño, M.DДокумент31 страницаProfessional Regula/on Commission: Clarita C. Maaño, M.Dmiguel triggartОценок пока нет
- Action Plan Lis 2021-2022Документ3 страницыAction Plan Lis 2021-2022Vervie BingalogОценок пока нет
- PCДокумент4 страницыPCHrithik AryaОценок пока нет
- Exp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.Документ7 страницExp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.AbhishEk SinghОценок пока нет
- Ikea AnalysisДокумент33 страницыIkea AnalysisVinod BridglalsinghОценок пока нет
- Ingles Avanzado 1 Trabajo FinalДокумент4 страницыIngles Avanzado 1 Trabajo FinalFrancis GarciaОценок пока нет
- TSB 120Документ7 страницTSB 120patelpiyushbОценок пока нет
- RevisionHistory APFIFF33 To V219Документ12 страницRevisionHistory APFIFF33 To V219younesОценок пока нет
- Tanzania Finance Act 2008Документ25 страницTanzania Finance Act 2008Andrey PavlovskiyОценок пока нет
- Simoreg ErrorДокумент30 страницSimoreg Errorphth411Оценок пока нет
- Peoria County Jail Booking Sheet For Oct. 7, 2016Документ6 страницPeoria County Jail Booking Sheet For Oct. 7, 2016Journal Star police documents50% (2)
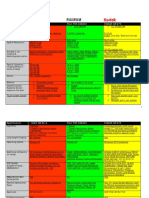
- Agfa CR 85-X: Specification Fuji FCR Xg5000 Kodak CR 975Документ3 страницыAgfa CR 85-X: Specification Fuji FCR Xg5000 Kodak CR 975Youness Ben TibariОценок пока нет
- Portrait of An INTJДокумент2 страницыPortrait of An INTJDelia VlasceanuОценок пока нет
- Brand Positioning of PepsiCoДокумент9 страницBrand Positioning of PepsiCoAbhishek DhawanОценок пока нет
- Web Technology PDFДокумент3 страницыWeb Technology PDFRahul Sachdeva100% (1)
- CIR Vs PAL - ConstructionДокумент8 страницCIR Vs PAL - ConstructionEvan NervezaОценок пока нет