Академический Документы
Профессиональный Документы
Культура Документы
Singla A., Modeling, Analysis and Control of Flexible Robotic Manipulators
Загружено:
Sameer GuptaОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Singla A., Modeling, Analysis and Control of Flexible Robotic Manipulators
Загружено:
Sameer GuptaАвторское право:
Доступные форматы
Modeling, Analysis and Control of
Flexible Robotic Manipulators
Dr. Ashish Singla
ashish.singla@thapar.edu
Talk@STTPAR2013
March 22, 2013
1
OUTLINE
Motivation
LiteratureReview
DynamicModeling
CommandShaping
ControllerDesign
ResultsandDiscussions
!
"#
$
%&#
!#
$
%&'"#
(
%#
)
"#
)#
*#
$
%+
"
*%#
,
%-#
#
,
%-'.#
)
%#
(/#(
"#
%
#
!
%#
2
MOTIVATION
InherentCapabilitiesofFlexibleManipulators
Fastersystemresponse,
Lowenergyconsumption,
Utilizationofrelativelysmalleractuators,
Lessweight,
Lessoverallcost.
Challenge:Largestructuralvibrations(precisecontrol)
3
ApplicationsofFlexibleManipulators
Painting,
Drawing,
Polishing,
Automated deburring,
Patternrecognition,
Nuclearmaintenance,
Storagetankcleaningandinspection,
Micro-surgicaloperation,
Spaceapplicationsandmanyotherchallengingareas.
4
LITERATUREREVIEW
5
ModelingofFlexibleManipulators
Distributed
System
Discrete
System
Dynamic
Model
LITERATUREREVIEW
6
ModelingofFlexibleManipulators
Distributed
System
LPM
FEM
AMM
Discrete
System
Dynamic
Model
LITERATUREREVIEW
7
ModelingofFlexibleManipulators
Distributed
System
LPM
FEM
AMM
Discrete
System
Dynamic
Model
Kovecses(1998)
Possess infinite degrees of freedom
Governed by PDEs and leads to BVPs
These BVPs do not admit closed-form solutions
Yoshikawa&Hosoda(1996),Konno&Uchiyama(1996),
Dingetal.(2004)
System modeled as a spring-mass system
Easy to implement for quick analysis
Does not have a solid mathematical foundation
Hastening&Book(1986),Wang&Vidyasagar(1991),
DeLuca&Siciliano(1991),Morris&Madani(1998)
Discretization is performed by means of a series solution
Conceptually simple
Does not have a solid mathematical foundation.
Usoroetal.(1986),Naganathan&Soni(1987)
TheodoreandGhosal(1995),Mohamed&Tokhi(2004)
Can handle non-uniform cross-sections, irregular
structures and multi-body systems
Computationally expensive
Feedforward
Control
Feedback
Control
Control
Hybrid
Control
ControlofFlexibleManipulators
Feedforward
Control
Feedback
Control
Control
Nonlinear
Feedback
Linear
Feedback
Hybrid
Control
ControlofFlexibleManipulators
Feedforward Control
Bang-BangControl
Tokhi(2001)
Requires two-impulse inputs
Excites all the modes of the structure
Leads to high vibration level
Open-loopInputShaping
Active vibration suppression strategy
Prone to disturbances, which may arise due to unsuppressed
higher modes, parametric uncertainty or inaccurate modeling of
real-world systems.
Singer(1990)
Hyde&Seering(1991),
Pao(1998),Vaughan(2008),SinghoseandVaughan(2011)
Hillsley(1993),Tewari(2004)
10
FeedforwardControl
Multiple-modeshaping
Robust shaping techniques
Combination with feedback
control schemes
Nonlinear Controllers
Model-based control scheme
Used for tracking problem in joint space
Requires exact knowledge of the system parameters
Needs on-line dynamic computations at high sampling rate
Morris&Madani(1997),AousTn(1999)
Generalizes the concept of computed torque control
Linearizes the nonlinear system after a suitable change of
state-space variables.
DeLuca(1988),Linetal.(2003)
Able to maintain the desired performance despite
parametric uncertainties, unmodeled dynamics and external
disturbances present in the system
Leeetal.(2001),Theodore&Ghosal(2003)
Robust controller is a fixed controller designed to handle
uncertainties in a given range, whereas an adaptive
controller performs on-line parameter estimation
Yangetal.(1997),Chang&Fu(1997)
11
FeedbackControl
ComputedTorqueControl
AdaptiveControl
RobustControl
FeedbackLinearization
SlidingModeControl
NeuralNetwork
BasedControl
SingularPerturbation
Control
Nonlinear Feedback
Based on an augmented state feedback
Additional state variables are called as surface variables
Romanoetal.(2002),Feng&Yu(2009),Huetal.(2012)
Based on the separation between two dynamics --- slow
dynamics and fast dynamics.
The first one characterize the rigid joint motion, second
one is associated with the motion of elastic links
DeLuca(1988),Linetal.(2003)
To enhance the robustness of a controller to model
uncertainties, neural network approach is in conjunction with
classical control laws.
ShaheedandTokhi(2002),Yuanchunetal.(2003),Abe(2011)
12
FeedbackControl
Based on position as well as velocity error
PD control law is local (torques developed at a particular joint
depends on the position and velocity of that particular joint)
DeLucaandSiciliano(1993),LiuandYuan(2003),HueyandSinghose(2012)
Widely used for regulation problems
Over-abundance of design parameters for multi-input, multi-
output (MIMO) systems.
Additional constraints are required to find the design parameters
of a multi-input regulator.
Utkin(1998),Konnoetal.(2002)
Linear Controllers
Performance objectives of a control system can be directly
formulated to find the design parameters of MIMO systems.
Provides desired performance objectives with minimum control
energy.
OnsayandAkay(1991),MorrisandMadani(1998)
13
FeedbackControl
PDControl
OptimalControl
PolePlacementApproach
Compensator
t
o
Plant
Error Control Output
(Regulator + ROO) (Flexible Model)
Feedback Loop
(L)
Input
-
+
Inverse Dynamics
Feedforward Path (NL)
+
+
U
fb
U
ff
t
o
Input
Shaper
Input
Shaper
Reference
Trajectory
OVERALLSCHEME
14
!
"#
$
%&#
!#
$
%&'"#
(
%#
)
"#
)#
*#
$
%+
"
*%#
,
%-#
#
,
%-'.#
)
%#
(/#(
"#
%
#
!
%#
DYNAMICMODELING
Schematic Diagram of a 2-Link Flexible Manipulator
Smallangleapproximation.
Euler-Bernoullibeamtheory
Lagrange/FEMapproach
Eachlink-nitenumberofelements.
15
FEM: Elemental Equations of Motion
Transverse displacement within
the beam element is given as
Boundar y condi t i ons on shape
functions
Four constrai nts : Cubi c shape
functions
Shape functions for the i
th
element
Hermite Polynomials
u (t)
1
3
4
x
l
u (t)
u (t)
2
u (t)
y (x,t)
Figure 3.3: A uniform beam element.
Table 3.1: Boundary conditions on shape functions.
x
1
1
2
2
3
3
4
4
0 1 0 0 1 0 0 0 0
l 0 0 0 0 1 0 0 1
3.4.1 Element equations of motion
In this section, the equations of motion of a beam element are derived based on the Euler-Bernoulli theory.
The beam is divided into elements and each node of the element possess two degrees of freedom. The degrees
of freedom of i
th
node are u
2i1
(transverse displacement) and u
2i
(slope). The element nodal displacement
vector is represented as u
e
= {u
1
, u
2
, u
3
, u
4
}
T
. A typical beam element of length l, undergoing transverse
vibrations, is shown in Fig. 3.3. The transverse displacement y(x, t) within the element is given by
y(x, t) =
4
i1
i
(x)u
i
(t), (3.23)
where
i
(x) are the shape functions which must satisfy the nodal displacement and slope continuity require-
ments. The prescribed boundary conditions on the beam element can be given as
y(0, t) = u
1
(t),
y
x
(0, t) = u
2
(t),
y(l, t) = u
3
(t),
y
x
(l, t) = u
4
(t). (3.24)
Subject to the element boundary conditions, the shape functions must satisfy the boundary conditions, as
given in Table 3.1. As there are four constraints on each interpolation function, cubic shape functions are
selected, which are of the following form
i
(x) = a
i
+ b
i
x + c
i
x
2
+ d
i
x
3
, i = 1, ..., 4 (3.25)
12
u (t)
1
3
4
x
l
u (t)
u (t)
2
u (t)
y (x,t)
Figure 3.3: A uniform beam element.
Table 3.1: Boundary conditions on shape functions.
x
1
1
2
2
3
3
4
4
0 1 0 0 1 0 0 0 0
l 0 0 0 0 1 0 0 1
3.4.1 Element equations of motion
In this section, the equations of motion of a beam element are derived based on the Euler-Bernoulli theory.
The beam is divided into elements and each node of the element possess two degrees of freedom. The degrees
of freedom of i
th
node are u
2i1
(transverse displacement) and u
2i
(slope). The element nodal displacement
vector is represented as u
e
= {u
1
, u
2
, u
3
, u
4
}
T
. A typical beam element of length l, undergoing transverse
vibrations, is shown in Fig. 3.3. The transverse displacement y(x, t) within the element is given by
y(x, t) =
4
i1
i
(x)u
i
(t), (3.23)
where
i
(x) are the shape functions which must satisfy the nodal displacement and slope continuity require-
ments. The prescribed boundary conditions on the beam element can be given as
y(0, t) = u
1
(t),
y
x
(0, t) = u
2
(t),
y(l, t) = u
3
(t),
y
x
(l, t) = u
4
(t). (3.24)
Subject to the element boundary conditions, the shape functions must satisfy the boundary conditions, as
given in Table 3.1. As there are four constraints on each interpolation function, cubic shape functions are
selected, which are of the following form
i
(x) = a
i
+ b
i
x + c
i
x
2
+ d
i
x
3
, i = 1, ..., 4 (3.25)
12
u (t)
1
3
4
x
l
u (t)
u (t)
2
u (t)
y (x,t)
Figure 3.3: A uniform beam element.
Table 3.1: Boundary conditions on shape functions.
x
1
1
2
2
3
3
4
4
0 1 0 0 1 0 0 0 0
l 0 0 0 0 1 0 0 1
3.4.1 Element equations of motion
In this section, the equations of motion of a beam element are derived based on the Euler-Bernoulli theory.
The beam is divided into elements and each node of the element possess two degrees of freedom. The degrees
of freedom of i
th
node are u
2i1
(transverse displacement) and u
2i
(slope). The element nodal displacement
vector is represented as u
e
= {u
1
, u
2
, u
3
, u
4
}
T
. A typical beam element of length l, undergoing transverse
vibrations, is shown in Fig. 3.3. The transverse displacement y(x, t) within the element is given by
y(x, t) =
4
i1
i
(x)u
i
(t), (3.23)
where
i
(x) are the shape functions which must satisfy the nodal displacement and slope continuity require-
ments. The prescribed boundary conditions on the beam element can be given as
y(0, t) = u
1
(t),
y
x
(0, t) = u
2
(t),
y(l, t) = u
3
(t),
y
x
(l, t) = u
4
(t). (3.24)
Subject to the element boundary conditions, the shape functions must satisfy the boundary conditions, as
given in Table 3.1. As there are four constraints on each interpolation function, cubic shape functions are
selected, which are of the following form
i
(x) = a
i
+ b
i
x + c
i
x
2
+ d
i
x
3
, i = 1, ..., 4 (3.25)
12
1
Slope = 0
Slope = 0
0 1
! ( ) x
(x)
Slope = 0
Slope = 0
1
x
1
0
(x)
l
Slope = 0
(x)
2
0 l
! ( )
x
! ( )
l
0
(x)
Slope = 0 Slope = 1
! ( )
Slope = 1
3
4
x
Figure 3.4: Hermite cubic shape functions.
Eliminating the constants using Eq. (3.25), subject to the boundary conditions given in Table 3.1, the shape
functions for the i
th
element can be represented as
1
(x) = 1 3
x
2
l
2
+ 2
x
3
l
3
,
2
(x) = x 2
x
2
l
+
x
3
l
2
,
3
(x) = 3
x
2
l
2
2
x
3
l
3
,
4
(x) =
x
2
l
+
x
3
l
2
, (3.26)
which are known as Hermite polynomials [49], as shown in Fig. 3.4. Substituting Eq. (3.26) into Eq. (3.23),
the transverse deection of the beam element can be expressed as
y(x, t) =
1 3
x
2
l
2
+ 2
x
3
l
3
u
1
(t) +
x
l
2
x
2
l
2
+
x
3
l
3
lu
2
(t) +
3
x
2
l
2
2
x
3
l
3
u
3
(t) +
x
2
l
2
+
x
3
l
3
lu
4
(t). (3.27)
Further, the elemental kinetic energy can be computed as
T =
1
2
l
0
(x) [ y(x, t)]
2
dx. (3.28)
Using Eq. (3.23), kinetic energy of the element can be expressed as
T =
1
2
l
0
(x)
i=1
i
(x) u
i
(t)
j=1
j
(x) u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t) u
j
(t)
l
0
(x)
i
(x)
j
(x)
dx. (3.29)
13
1
Slope = 0
Slope = 0
0 1
! ( ) x
(x)
Slope = 0
Slope = 0
1
x
1
0
(x)
l
Slope = 0
(x)
2
0 l
! ( )
x
! ( )
l
0
(x)
Slope = 0 Slope = 1
! ( )
Slope = 1
3
4
x
Figure 3.4: Hermite cubic shape functions.
Eliminating the constants using Eq. (3.25), subject to the boundary conditions given in Table 3.1, the shape
functions for the i
th
element can be represented as
1
(x) = 1 3
x
2
l
2
+ 2
x
3
l
3
,
2
(x) = x 2
x
2
l
+
x
3
l
2
,
3
(x) = 3
x
2
l
2
2
x
3
l
3
,
4
(x) =
x
2
l
+
x
3
l
2
, (3.26)
which are known as Hermite polynomials [49], as shown in Fig. 3.4. Substituting Eq. (3.26) into Eq. (3.23),
the transverse deection of the beam element can be expressed as
y(x, t) =
1 3
x
2
l
2
+ 2
x
3
l
3
u
1
(t) +
x
l
2
x
2
l
2
+
x
3
l
3
lu
2
(t) +
3
x
2
l
2
2
x
3
l
3
u
3
(t) +
x
2
l
2
+
x
3
l
3
lu
4
(t). (3.27)
Further, the elemental kinetic energy can be computed as
T =
1
2
l
0
(x) [ y(x, t)]
2
dx. (3.28)
Using Eq. (3.23), kinetic energy of the element can be expressed as
T =
1
2
l
0
(x)
i=1
i
(x) u
i
(t)
j=1
j
(x) u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t) u
j
(t)
l
0
(x)
i
(x)
j
(x)
dx. (3.29)
13
u (t)
1
3
4
x
l
u (t)
u (t)
2
u (t)
y (x,t)
Figure 3.3: A uniform beam element.
Table 3.1: Boundary conditions on shape functions.
x
1
1
2
2
3
3
4
4
0 1 0 0 1 0 0 0 0
l 0 0 0 0 1 0 0 1
3.4.1 Element equations of motion
In this section, the equations of motion of a beam element are derived based on the Euler-Bernoulli theory.
The beam is divided into elements and each node of the element possess two degrees of freedom. The degrees
of freedom of i
th
node are u
2i1
(transverse displacement) and u
2i
(slope). The element nodal displacement
vector is represented as u
e
= {u
1
, u
2
, u
3
, u
4
}
T
. A typical beam element of length l, undergoing transverse
vibrations, is shown in Fig. 3.3. The transverse displacement y(x, t) within the element is given by
y(x, t) =
4
i1
i
(x)u
i
(t), (3.23)
where
i
(x) are the shape functions which must satisfy the nodal displacement and slope continuity require-
ments. The prescribed boundary conditions on the beam element can be given as
y(0, t) = u
1
(t),
y
x
(0, t) = u
2
(t),
y(l, t) = u
3
(t),
y
x
(l, t) = u
4
(t). (3.24)
Subject to the element boundary conditions, the shape functions must satisfy the boundary conditions, as
given in Table 3.1. As there are four constraints on each interpolation function, cubic shape functions are
selected, which are of the following form
i
(x) = a
i
+ b
i
x + c
i
x
2
+ d
i
x
3
, i = 1, ..., 4 (3.25)
12
1
Slope = 0
Slope = 0
0 1
! ( ) x
(x)
Slope = 0
Slope = 0
1
x
1
0
(x)
l
Slope = 0
(x)
2
0 l
! ( ) x
! ( )
l 0 (x)
Slope = 0 Slope = 1
! ( )
Slope = 1
3
4
x
Figure 3.4: Hermite cubic shape functions.
Eliminating the constants using Eq. (3.25), subject to the boundary conditions given in Table 3.1, the shape
functions for the i
th
element can be represented as
1(x) = 1 3
x
2
l
2
+ 2
x
3
l
3
,
2(x) = x 2
x
2
l
+
x
3
l
2
,
3(x) = 3
x
2
l
2
2
x
3
l
3
,
4(x) =
x
2
l
+
x
3
l
2
, (3.26)
which are known as Hermite polynomials [49], as shown in Fig. 3.4. Substituting Eq. (3.26) into Eq. (3.23),
the transverse deection of the beam element can be expressed as
y(x, t) =
1 3
x
2
l
2
+ 2
x
3
l
3
u1(t) +
x
l
2
x
2
l
2
+
x
3
l
3
lu2(t) +
3
x
2
l
2
2
x
3
l
3
u3(t) +
x
2
l
2
+
x
3
l
3
lu4(t). (3.27)
Further, the elemental kinetic energy can be computed as
T =
1
2
l
0
(x) [ y(x, t)]
2
dx. (3.28)
Using Eq. (3.23), kinetic energy of the element can be expressed as
T =
1
2
l
0
(x)
i=1
i(x) ui(t)
j=1
j(x) uj (t)
dx
=
1
2
4
i=1
4
j=1
ui(t) uj(t)
l
0
(x)i(x)j (x)
dx. (3.29)
13
u (t)
1
3
4
x
l
u (t)
u (t)
2
u (t)
y (x,t)
Figure 3.3: A uniform beam element.
Table 3.1: Boundary conditions on shape functions.
x
1
1
2
2
3
3
4
4
0 1 0 0 1 0 0 0 0
l 0 0 0 0 1 0 0 1
3.4.1 Element equations of motion
In this section, the equations of motion of a beam element are derived based on the Euler-Bernoulli theory.
The beam is divided into elements and each node of the element possess two degrees of freedom. The degrees
of freedom of i
th
node are u
2i1
(transverse displacement) and u
2i
(slope). The element nodal displacement
vector is represented as u
e
= {u
1
, u
2
, u
3
, u
4
}
T
. A typical beam element of length l, undergoing transverse
vibrations, is shown in Fig. 3.3. The transverse displacement y(x, t) within the element is given by
y(x, t) =
4
i1
i
(x)u
i
(t), (3.23)
where
i
(x) are the shape functions which must satisfy the nodal displacement and slope continuity require-
ments. The prescribed boundary conditions on the beam element can be given as
y(0, t) = u
1
(t),
y
x
(0, t) = u
2
(t),
y(l, t) = u
3
(t),
y
x
(l, t) = u
4
(t). (3.24)
Subject to the element boundary conditions, the shape functions must satisfy the boundary conditions, as
given in Table 3.1. As there are four constraints on each interpolation function, cubic shape functions are
selected, which are of the following form
i
(x) = a
i
+ b
i
x + c
i
x
2
+ d
i
x
3
, i = 1, ..., 4 (3.25)
12
16
17
Elemental Kinetic Energy
4.4. FINITE ELEMENT METHOD
expressed as
y(x, t) =
1 3
x
2
l
2
+ 2
x
3
l
3
u
1
(t) +
x
l
2
x
2
l
2
+
x
3
l
3
lu
2
(t) +
3
x
2
l
2
2
x
3
l
3
u
3
(t) +
x
2
l
2
+
x
3
l
3
lu
4
(t). (4.30)
Further, the elemental kinetic energy can be computed as
T =
1
2
l
0
(x) [ y(x, t)]
2
dx. (4.31)
Using Eq. (4.26), kinetic energy of the element can be expressed as
T =
1
2
l
0
(x)
i=1
i
(x) u
i
(t)
j=1
j
(x) u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t) u
j
(t)
l
0
(x)
i
(x)
j
(x)
dx. (4.32)
From the above expression, elemental mass matrix can be computed as
M
e
=
l
0
(x)
i
(x)
j
(x)dx i = j = 1, , 4
=
l
420
156 22l 54 13l
22l 4l
2
13l 3l
2
54 13l 156 22l
13l 3l
2
22l 4l
2
. (4.33)
On the other hand, elemental potential energy can be expressed as
V =
1
2
l
0
EI(x) [y
(x, t)]
2
dx, (4.34)
which can be approximated as
V =
1
2
l
0
EI(x)
i=1
i
(x)u
i
(t)
j=1
j
(x)u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t)u
j
(t)
l
0
EI(x)
i
(x)
j
(x)
dx. (4.35)
From the above expression, elemental stiness matrix can be computed as
K
e
=
l
0
EI(x)
i
(x)
j
(x) i = j = 1, , 4
=
EI
l
3
12 6l 12 6l
6l 4l
2
6l 2l
2
12 6l 12 6l
6l 2l
2
6l 4l
2
. (4.36)
53
4.4. FINITE ELEMENT METHOD
expressed as
y(x, t) =
1 3
x
2
l
2
+ 2
x
3
l
3
u
1
(t) +
x
l
2
x
2
l
2
+
x
3
l
3
lu
2
(t) +
3
x
2
l
2
2
x
3
l
3
u
3
(t) +
x
2
l
2
+
x
3
l
3
lu
4
(t). (4.30)
Further, the elemental kinetic energy can be computed as
T =
1
2
l
0
(x) [ y(x, t)]
2
dx. (4.31)
Using Eq. (4.26), kinetic energy of the element can be expressed as
T =
1
2
l
0
(x)
i=1
i
(x) u
i
(t)
j=1
j
(x) u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t) u
j
(t)
l
0
(x)
i
(x)
j
(x)
dx. (4.32)
From the above expression, elemental mass matrix can be computed as
M
e
=
l
0
(x)
i
(x)
j
(x)dx i = j = 1, , 4
=
l
420
156 22l 54 13l
22l 4l
2
13l 3l
2
54 13l 156 22l
13l 3l
2
22l 4l
2
. (4.33)
On the other hand, elemental potential energy can be expressed as
V =
1
2
l
0
EI(x) [y
(x, t)]
2
dx, (4.34)
which can be approximated as
V =
1
2
l
0
EI(x)
i=1
i
(x)u
i
(t)
j=1
j
(x)u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t)u
j
(t)
l
0
EI(x)
i
(x)
j
(x)
dx. (4.35)
From the above expression, elemental stiness matrix can be computed as
K
e
=
l
0
EI(x)
i
(x)
j
(x) i = j = 1, , 4
=
EI
l
3
12 6l 12 6l
6l 4l
2
6l 2l
2
12 6l 12 6l
6l 2l
2
6l 4l
2
. (4.36)
53
Elemental Mass Matrix
4.4. FINITE ELEMENT METHOD
expressed as
y(x, t) =
1 3
x
2
l
2
+ 2
x
3
l
3
u
1
(t) +
x
l
2
x
2
l
2
+
x
3
l
3
lu
2
(t) +
3
x
2
l
2
2
x
3
l
3
u
3
(t) +
x
2
l
2
+
x
3
l
3
lu
4
(t). (4.30)
Further, the elemental kinetic energy can be computed as
T =
1
2
l
0
(x) [ y(x, t)]
2
dx. (4.31)
Using Eq. (4.26), kinetic energy of the element can be expressed as
T =
1
2
l
0
(x)
i=1
i
(x) u
i
(t)
j=1
j
(x) u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t) u
j
(t)
l
0
(x)
i
(x)
j
(x)
dx. (4.32)
From the above expression, elemental mass matrix can be computed as
M
e
=
l
0
(x)
i
(x)
j
(x)dx i = j = 1, , 4
=
l
420
156 22l 54 13l
22l 4l
2
13l 3l
2
54 13l 156 22l
13l 3l
2
22l 4l
2
. (4.33)
On the other hand, elemental potential energy can be expressed as
V =
1
2
l
0
EI(x) [y
(x, t)]
2
dx, (4.34)
which can be approximated as
V =
1
2
l
0
EI(x)
i=1
i
(x)u
i
(t)
j=1
j
(x)u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t)u
j
(t)
l
0
EI(x)
i
(x)
j
(x)
dx. (4.35)
From the above expression, elemental stiness matrix can be computed as
K
e
=
l
0
EI(x)
i
(x)
j
(x) i = j = 1, , 4
=
EI
l
3
12 6l 12 6l
6l 4l
2
6l 2l
2
12 6l 12 6l
6l 2l
2
6l 4l
2
. (4.36)
53
4.4. FINITE ELEMENT METHOD
expressed as
y(x, t) =
1 3
x
2
l
2
+ 2
x
3
l
3
u
1
(t) +
x
l
2
x
2
l
2
+
x
3
l
3
lu
2
(t) +
3
x
2
l
2
2
x
3
l
3
u
3
(t) +
x
2
l
2
+
x
3
l
3
lu
4
(t). (4.30)
Further, the elemental kinetic energy can be computed as
T =
1
2
l
0
(x) [ y(x, t)]
2
dx. (4.31)
Using Eq. (4.26), kinetic energy of the element can be expressed as
T =
1
2
l
0
(x)
i=1
i
(x) u
i
(t)
j=1
j
(x) u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t) u
j
(t)
l
0
(x)
i
(x)
j
(x)
dx. (4.32)
From the above expression, elemental mass matrix can be computed as
M
e
=
l
0
(x)
i
(x)
j
(x)dx i = j = 1, , 4
=
l
420
156 22l 54 13l
22l 4l
2
13l 3l
2
54 13l 156 22l
13l 3l
2
22l 4l
2
. (4.33)
On the other hand, elemental potential energy can be expressed as
V =
1
2
l
0
EI(x) [y
(x, t)]
2
dx, (4.34)
which can be approximated as
V =
1
2
l
0
EI(x)
i=1
i
(x)u
i
(t)
j=1
j
(x)u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t)u
j
(t)
l
0
EI(x)
i
(x)
j
(x)
dx. (4.35)
From the above expression, elemental stiness matrix can be computed as
K
e
=
l
0
EI(x)
i
(x)
j
(x) i = j = 1, , 4
=
EI
l
3
12 6l 12 6l
6l 4l
2
6l 2l
2
12 6l 12 6l
6l 2l
2
6l 4l
2
. (4.36)
53
Elemental Potential Energy
4.4. FINITE ELEMENT METHOD
expressed as
y(x, t) =
1 3
x
2
l
2
+ 2
x
3
l
3
u
1
(t) +
x
l
2
x
2
l
2
+
x
3
l
3
lu
2
(t) +
3
x
2
l
2
2
x
3
l
3
u
3
(t) +
x
2
l
2
+
x
3
l
3
lu
4
(t). (4.30)
Further, the elemental kinetic energy can be computed as
T =
1
2
l
0
(x) [ y(x, t)]
2
dx. (4.31)
Using Eq. (4.26), kinetic energy of the element can be expressed as
T =
1
2
l
0
(x)
i=1
i
(x) u
i
(t)
j=1
j
(x) u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t) u
j
(t)
l
0
(x)
i
(x)
j
(x)
dx. (4.32)
From the above expression, elemental mass matrix can be computed as
M
e
=
l
0
(x)
i
(x)
j
(x)dx i = j = 1, , 4
=
l
420
156 22l 54 13l
22l 4l
2
13l 3l
2
54 13l 156 22l
13l 3l
2
22l 4l
2
. (4.33)
On the other hand, elemental potential energy can be expressed as
V =
1
2
l
0
EI(x) [y
(x, t)]
2
dx, (4.34)
which can be approximated as
V =
1
2
l
0
EI(x)
i=1
i
(x)u
i
(t)
j=1
j
(x)u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t)u
j
(t)
l
0
EI(x)
i
(x)
j
(x)
dx. (4.35)
From the above expression, elemental stiness matrix can be computed as
K
e
=
l
0
EI(x)
i
(x)
j
(x) i = j = 1, , 4
=
EI
l
3
12 6l 12 6l
6l 4l
2
6l 2l
2
12 6l 12 6l
6l 2l
2
6l 4l
2
. (4.36)
53
Elemental Stiffness Matrix
Generalized Force Vector
Elemental Equations of Motion (using Lagrange equations)
18
4.4. FINITE ELEMENT METHOD
expressed as
y(x, t) =
1 3
x
2
l
2
+ 2
x
3
l
3
u
1
(t) +
x
l
2
x
2
l
2
+
x
3
l
3
lu
2
(t) +
3
x
2
l
2
2
x
3
l
3
u
3
(t) +
x
2
l
2
+
x
3
l
3
lu
4
(t). (4.30)
Further, the elemental kinetic energy can be computed as
T =
1
2
l
0
(x) [ y(x, t)]
2
dx. (4.31)
Using Eq. (4.26), kinetic energy of the element can be expressed as
T =
1
2
l
0
(x)
i=1
i
(x) u
i
(t)
j=1
j
(x) u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t) u
j
(t)
l
0
(x)
i
(x)
j
(x)
dx. (4.32)
From the above expression, elemental mass matrix can be computed as
M
e
=
l
0
(x)
i
(x)
j
(x)dx i = j = 1, , 4
=
l
420
156 22l 54 13l
22l 4l
2
13l 3l
2
54 13l 156 22l
13l 3l
2
22l 4l
2
. (4.33)
On the other hand, elemental potential energy can be expressed as
V =
1
2
l
0
EI(x) [y
(x, t)]
2
dx, (4.34)
which can be approximated as
V =
1
2
l
0
EI(x)
i=1
i
(x)u
i
(t)
j=1
j
(x)u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t)u
j
(t)
l
0
EI(x)
i
(x)
j
(x)
dx. (4.35)
From the above expression, elemental stiness matrix can be computed as
K
e
=
l
0
EI(x)
i
(x)
j
(x) i = j = 1, , 4
=
EI
l
3
12 6l 12 6l
6l 4l
2
6l 2l
2
12 6l 12 6l
6l 2l
2
6l 4l
2
. (4.36)
53
4.4. FINITE ELEMENT METHOD
expressed as
y(x, t) =
1 3
x
2
l
2
+ 2
x
3
l
3
u
1
(t) +
x
l
2
x
2
l
2
+
x
3
l
3
lu
2
(t) +
3
x
2
l
2
2
x
3
l
3
u
3
(t) +
x
2
l
2
+
x
3
l
3
lu
4
(t). (4.30)
Further, the elemental kinetic energy can be computed as
T =
1
2
l
0
(x) [ y(x, t)]
2
dx. (4.31)
Using Eq. (4.26), kinetic energy of the element can be expressed as
T =
1
2
l
0
(x)
i=1
i
(x) u
i
(t)
j=1
j
(x) u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t) u
j
(t)
l
0
(x)
i
(x)
j
(x)
dx. (4.32)
From the above expression, elemental mass matrix can be computed as
M
e
=
l
0
(x)
i
(x)
j
(x)dx i = j = 1, , 4
=
l
420
156 22l 54 13l
22l 4l
2
13l 3l
2
54 13l 156 22l
13l 3l
2
22l 4l
2
. (4.33)
On the other hand, elemental potential energy can be expressed as
V =
1
2
l
0
EI(x) [y
(x, t)]
2
dx, (4.34)
which can be approximated as
V =
1
2
l
0
EI(x)
i=1
i
(x)u
i
(t)
j=1
j
(x)u
j
(t)
dx
=
1
2
4
i=1
4
j=1
u
i
(t)u
j
(t)
l
0
EI(x)
i
(x)
j
(x)
dx. (4.35)
From the above expression, elemental stiness matrix can be computed as
K
e
=
l
0
EI(x)
i
(x)
j
(x) i = j = 1, , 4
=
EI
l
3
12 6l 12 6l
6l 4l
2
6l 2l
2
12 6l 12 6l
6l 2l
2
6l 4l
2
. (4.36)
53
CHAPTER 4. MODELING OF FLEXIBLE MANIPULATORS
Finally, generalized force vector is given as
f
e
=
l
0
f(x, t)
i
(x)dx i = 1, , 4
=
fl
12
6
l
6
l
. (4.37)
where f(x, t) is the transverse load uniformly distributed over the beam element.
Using the Lagrange equations, elemental equations of motion are given as
M
e
u
e
+K
e
u
e
= f
e
. (4.38)
4.4.2 Assembling process
In the previous section mass matrix, stiness matrix and nodal force vector
are developed at the elemental level. In the present section, results obtained
at elemental level are extended for the complete structure as an assemblage of
individual elements. The complete structure can be adequately modeled by in-
corporating the constraint of geometric compatibility at each element node, i.e.
nodal displacements translations and rotations, shared by several elements must
be same. The nodal forces forces and torques, must be statically equivalent to
the applied forces. The common set of local displacement coordinates become the
generalized coordinates of the whole structure. The whole assembly procedure
has been presented below with a xed-free beam of length L, which is divided into
x
1 2
n
1
2 3
u
2n1
u
2n+1
2n
u
u
2n+2
u
3
u
2
u
4
u
1
n1
n1 n
n+1
L
Figure 4.5: A xed-free beam discretized into n elements.
54
CHAPTER 4. MODELING OF FLEXIBLE MANIPULATORS
Finally, generalized force vector is given as
f
e
=
l
0
f(x, t)
i
(x)dx i = 1, , 4
=
fl
12
6
l
6
l
. (4.37)
where f(x, t) is the transverse load uniformly distributed over the beam element.
Using the Lagrange equations, elemental equations of motion are given as
M
e
u
e
+K
e
u
e
= f
e
. (4.38)
4.4.2 Assembling process
In the previous section mass matrix, stiness matrix and nodal force vector
are developed at the elemental level. In the present section, results obtained
at elemental level are extended for the complete structure as an assemblage of
individual elements. The complete structure can be adequately modeled by in-
corporating the constraint of geometric compatibility at each element node, i.e.
nodal displacements translations and rotations, shared by several elements must
be same. The nodal forces forces and torques, must be statically equivalent to
the applied forces. The common set of local displacement coordinates become the
generalized coordinates of the whole structure. The whole assembly procedure
has been presented below with a xed-free beam of length L, which is divided into
x
1 2
n
1
2 3
u
2n1
u
2n+1
2n
u
u
2n+2
u
3
u
2
u
4
u
1
n1
n1 n
n+1
L
Figure 4.5: A xed-free beam discretized into n elements.
54
CHAPTER 4. MODELING OF FLEXIBLE MANIPULATORS
Finally, generalized force vector is given as
f
e
=
l
0
f(x, t)
i
(x)dx i = 1, , 4
=
fl
12
6
l
6
l
. (4.37)
where f(x, t) is the transverse load uniformly distributed over the beam element.
Using the Lagrange equations, elemental equations of motion are given as
M
e
u
e
+K
e
u
e
= f
e
. (4.38)
4.4.2 Assembling process
In the previous section mass matrix, stiness matrix and nodal force vector
are developed at the elemental level. In the present section, results obtained
at elemental level are extended for the complete structure as an assemblage of
individual elements. The complete structure can be adequately modeled by in-
corporating the constraint of geometric compatibility at each element node, i.e.
nodal displacements translations and rotations, shared by several elements must
be same. The nodal forces forces and torques, must be statically equivalent to
the applied forces. The common set of local displacement coordinates become the
generalized coordinates of the whole structure. The whole assembly procedure
has been presented below with a xed-free beam of length L, which is divided into
x
1 2
n
1
2 3
u
2n1
u
2n+1
2n
u
u
2n+2
u
3
u
2
u
4
u
1
n1
n1 n
n+1
L
Figure 4.5: A xed-free beam discretized into n elements.
54
FEM: Assembly Process of a Fixed-Free Beam
!
" #
$
"
# %
&
#$!"
&
#$'"
#$
&
&
#$'#
&
%
&
#
&
(
&
"
$!"
$!" $
$'"
L
Global Mass Matrix
19
Nodal displacement vector for the whole structure
4.4. FINITE ELEMENT METHOD
n elements as shown in Fig. 4.5. The global displacement vector for the whole
structure is given as u
g
= {u
1
, u
2
, , u
2n+2
}
T
. By considering the continuity of
nodal displacements, global mass matrix (
M
g
) can be represented as
M
g
=
l
420
M
11
M
12
0 0 0 0
M
T
12
M
22
M
12
0 0 0
0
M
T
12
M
22
M
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0
M
22
M
12
0 0 0 0
M
T
12
M
33
, (4.39)
where
M
11
=
156 22l
22l 4l
2
,
M
12
=
54 13l
13l 3l
2
M
22
=
312 0
0 8l
2
,
M
33
=
156 22l
22l 4l
2
. (4.40)
Following a similar process, global stiness matrix (
K
g
) is given as
K
g
=
EI
l
3
K
11
K
12
0 0 0 0
K
T
12
K
22
K
12
0 0 0
0
K
T
12
K
22
K
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0
K
22
K
12
0 0 0 0
K
T
12
K
33
, (4.41)
where
K
11
=
12 6l
6l 4l
2
,
K
12
=
12 6l
6l 2l
2
K
22
=
24 0
0 8l
2
,
K
33
=
12 6l
6l 4l
2
. (4.42)
It is worth mentioning that both global mass and stiness matrices are of size
(2n + 2) (2n + 2) and are symmetric in nature.
55
4.4. FINITE ELEMENT METHOD
n elements as shown in Fig. 4.5. The global displacement vector for the whole
structure is given as u
g
= {u
1
, u
2
, , u
2n+2
}
T
. By considering the continuity of
nodal displacements, global mass matrix (
M
g
) can be represented as
M
g
=
l
420
M
11
M
12
0 0 0 0
M
T
12
M
22
M
12
0 0 0
0
M
T
12
M
22
M
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0
M
22
M
12
0 0 0 0
M
T
12
M
33
, (4.39)
where
M
11
=
156 22l
22l 4l
2
,
M
12
=
54 13l
13l 3l
2
M
22
=
312 0
0 8l
2
,
M
33
=
156 22l
22l 4l
2
. (4.40)
Following a similar process, global stiness matrix (
K
g
) is given as
K
g
=
EI
l
3
K
11
K
12
0 0 0 0
K
T
12
K
22
K
12
0 0 0
0
K
T
12
K
22
K
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0
K
22
K
12
0 0 0 0
K
T
12
K
33
, (4.41)
where
K
11
=
12 6l
6l 4l
2
,
K
12
=
12 6l
6l 2l
2
K
22
=
24 0
0 8l
2
,
K
33
=
12 6l
6l 4l
2
. (4.42)
It is worth mentioning that both global mass and stiness matrices are of size
(2n + 2) (2n + 2) and are symmetric in nature.
55
4.4. FINITE ELEMENT METHOD
n elements as shown in Fig. 4.5. The global displacement vector for the whole
structure is given as u
g
= {u
1
, u
2
, , u
2n+2
}
T
. By considering the continuity of
nodal displacements, global mass matrix (
M
g
) can be represented as
M
g
=
l
420
M
11
M
12
0 0 0 0
M
T
12
M
22
M
12
0 0 0
0
M
T
12
M
22
M
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0
M
22
M
12
0 0 0 0
M
T
12
M
33
, (4.39)
where
M
11
=
156 22l
22l 4l
2
,
M
12
=
54 13l
13l 3l
2
M
22
=
312 0
0 8l
2
,
M
33
=
156 22l
22l 4l
2
. (4.40)
Following a similar process, global stiness matrix (
K
g
) is given as
K
g
=
EI
l
3
K
11
K
12
0 0 0 0
K
T
12
K
22
K
12
0 0 0
0
K
T
12
K
22
K
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0
K
22
K
12
0 0 0 0
K
T
12
K
33
, (4.41)
where
K
11
=
12 6l
6l 4l
2
,
K
12
=
12 6l
6l 2l
2
K
22
=
24 0
0 8l
2
,
K
33
=
12 6l
6l 4l
2
. (4.42)
It is worth mentioning that both global mass and stiness matrices are of size
(2n + 2) (2n + 2) and are symmetric in nature.
55
where
Global Stiffness Matrix
where
20
4.4. FINITE ELEMENT METHOD
n elements as shown in Fig. 4.5. The global displacement vector for the whole
structure is given as u
g
= {u
1
, u
2
, , u
2n+2
}
T
. By considering the continuity of
nodal displacements, global mass matrix (
M
g
) can be represented as
M
g
=
l
420
M
11
M
12
0 0 0 0
M
T
12
M
22
M
12
0 0 0
0
M
T
12
M
22
M
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0
M
22
M
12
0 0 0 0
M
T
12
M
33
, (4.39)
where
M
11
=
156 22l
22l 4l
2
,
M
12
=
54 13l
13l 3l
2
M
22
=
312 0
0 8l
2
,
M
33
=
156 22l
22l 4l
2
. (4.40)
Following a similar process, global stiness matrix (
K
g
) is given as
K
g
=
EI
l
3
K
11
K
12
0 0 0 0
K
T
12
K
22
K
12
0 0 0
0
K
T
12
K
22
K
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0
K
22
K
12
0 0 0 0
K
T
12
K
33
, (4.41)
where
K
11
=
12 6l
6l 4l
2
,
K
12
=
12 6l
6l 2l
2
K
22
=
24 0
0 8l
2
,
K
33
=
12 6l
6l 4l
2
. (4.42)
It is worth mentioning that both global mass and stiness matrices are of size
(2n + 2) (2n + 2) and are symmetric in nature.
55
4.4. FINITE ELEMENT METHOD
n elements as shown in Fig. 4.5. The global displacement vector for the whole
structure is given as u
g
= {u
1
, u
2
, , u
2n+2
}
T
. By considering the continuity of
nodal displacements, global mass matrix (
M
g
) can be represented as
M
g
=
l
420
M
11
M
12
0 0 0 0
M
T
12
M
22
M
12
0 0 0
0
M
T
12
M
22
M
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0
M
22
M
12
0 0 0 0
M
T
12
M
33
, (4.39)
where
M
11
=
156 22l
22l 4l
2
,
M
12
=
54 13l
13l 3l
2
M
22
=
312 0
0 8l
2
,
M
33
=
156 22l
22l 4l
2
. (4.40)
Following a similar process, global stiness matrix (
K
g
) is given as
K
g
=
EI
l
3
K
11
K
12
0 0 0 0
K
T
12
K
22
K
12
0 0 0
0
K
T
12
K
22
K
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0
K
22
K
12
0 0 0 0
K
T
12
K
33
, (4.41)
where
K
11
=
12 6l
6l 4l
2
,
K
12
=
12 6l
6l 2l
2
K
22
=
24 0
0 8l
2
,
K
33
=
12 6l
6l 4l
2
. (4.42)
It is worth mentioning that both global mass and stiness matrices are of size
(2n + 2) (2n + 2) and are symmetric in nature.
55
FEM: Boundary Conditions
Fixed-free case leads to the following boundary conditions
where
Global Mass Matrix
21
CHAPTER 4. MODELING OF FLEXIBLE MANIPULATORS
4.4.3 Boundary conditions
The whole assembly procedure is presented in the previous section, where each
element node is assumed to be unrestrained. This implies that all nodes of the
structure can undergo displacements i.e. the whole structure can undergo rigid
body motion under the joint forces, which leads to a singular stiness matrix.
However, structures are supported in general to prevent the rigid body mode.
Thus, it is necessary to incorporate the boundary conditions in equations of mo-
tion of the complete structure. Boundary condition are generally of two types
essential boundary conditions (prescribed displacements) and natural bound-
ary conditions (prescribed forces). While modeling the structure with FEM, force
boundary condition are taken into account while evaluating the externally applied
nodal force vector. However, displacement boundary conditions are imposed on
the global matrices. For example, in the case of clamped-free beam discussed
above, left-end of the beam is xed, which leads to the following boundary con-
ditions
y(x = 0, t) = 0 u
1
(t) = 0,
y
x
(x = 0, t) = 0 u
2
(t) = 0. (4.43)
These boundary conditions are implemented by deleting the rst two rows and
columns of global mass and stiness matrices. In addition, force distribution
on the beam is assumed to be zero i.e. f(x, t) = 0. The modied global dis-
placement vector for the whole structure is of size 2n 1 and can be given as
u
g
= {u
3
, u
4
, , u
2n+2
}
T
. Referring back to Eqs. (4.39) and (4.41), after impos-
ing the boundary conditions, global mass and stiness matrices can be modied
as
56
4.4. FINITE ELEMENT METHOD
M
g
=
l
420
M
11
M
12
0 0 0 0
M
T
12
M
11
M
12
0 0 0
0 M
T
12
M
11
M
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0 M
11
M
12
0 0 0 0 M
T
12
M
22
, (4.44)
where
M
11
=
M
22
, M
22
=
M
33
, M
12
=
M
12
. (4.45)
K
g
=
EI
l
3
K
11
K
12
0 0 0 0
K
T
12
K
11
K
12
0 0 0
0 K
T
12
K
11
K
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0 K
11
K
12
0 0 0 0 K
T
12
K
22
, (4.46)
where
K
11
=
K
22
, K
22
=
K
33
, K
12
=
K
12
. (4.47)
After imposing the boundary conditions, dimension of the system [M
g
, K
g
, u
g
]
is reduced to 2n. Finally, using the Lagrange equations, equations of motion for
the whole structure are given in the form
M
g
u
g
+K
g
u
g
= 0. (4.48)
57
4.4. FINITE ELEMENT METHOD
M
g
=
l
420
M
11
M
12
0 0 0 0
M
T
12
M
11
M
12
0 0 0
0 M
T
12
M
11
M
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0 M
11
M
12
0 0 0 0 M
T
12
M
22
, (4.44)
where
M
11
=
M
22
, M
22
=
M
33
, M
12
=
M
12
. (4.45)
K
g
=
EI
l
3
K
11
K
12
0 0 0 0
K
T
12
K
11
K
12
0 0 0
0 K
T
12
K
11
K
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0 K
11
K
12
0 0 0 0 K
T
12
K
22
, (4.46)
where
K
11
=
K
22
, K
22
=
K
33
, K
12
=
K
12
. (4.47)
After imposing the boundary conditions, dimension of the system [M
g
, K
g
, u
g
]
is reduced to 2n. Finally, using the Lagrange equations, equations of motion for
the whole structure are given in the form
M
g
u
g
+K
g
u
g
= 0. (4.48)
57
Global Stiffness Matrix
where
Equations of motion after imposing the boundary conditions
22
4.4. FINITE ELEMENT METHOD
M
g
=
l
420
M
11
M
12
0 0 0 0
M
T
12
M
11
M
12
0 0 0
0 M
T
12
M
11
M
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0 M
11
M
12
0 0 0 0 M
T
12
M
22
, (4.44)
where
M
11
=
M
22
, M
22
=
M
33
, M
12
=
M
12
. (4.45)
K
g
=
EI
l
3
K
11
K
12
0 0 0 0
K
T
12
K
11
K
12
0 0 0
0 K
T
12
K
11
K
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0 K
11
K
12
0 0 0 0 K
T
12
K
22
, (4.46)
where
K
11
=
K
22
, K
22
=
K
33
, K
12
=
K
12
. (4.47)
After imposing the boundary conditions, dimension of the system [M
g
, K
g
, u
g
]
is reduced to 2n. Finally, using the Lagrange equations, equations of motion for
the whole structure are given in the form
M
g
u
g
+K
g
u
g
= 0. (4.48)
57
4.4. FINITE ELEMENT METHOD
M
g
=
l
420
M
11
M
12
0 0 0 0
M
T
12
M
11
M
12
0 0 0
0 M
T
12
M
11
M
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0 M
11
M
12
0 0 0 0 M
T
12
M
22
, (4.44)
where
M
11
=
M
22
, M
22
=
M
33
, M
12
=
M
12
. (4.45)
K
g
=
EI
l
3
K
11
K
12
0 0 0 0
K
T
12
K
11
K
12
0 0 0
0 K
T
12
K
11
K
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0 K
11
K
12
0 0 0 0 K
T
12
K
22
, (4.46)
where
K
11
=
K
22
, K
22
=
K
33
, K
12
=
K
12
. (4.47)
After imposing the boundary conditions, dimension of the system [M
g
, K
g
, u
g
]
is reduced to 2n. Finally, using the Lagrange equations, equations of motion for
the whole structure are given in the form
M
g
u
g
+K
g
u
g
= 0. (4.48)
57
4.4. FINITE ELEMENT METHOD
M
g
=
l
420
M
11
M
12
0 0 0 0
M
T
12
M
11
M
12
0 0 0
0 M
T
12
M
11
M
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0 M
11
M
12
0 0 0 0 M
T
12
M
22
, (4.44)
where
M
11
=
M
22
, M
22
=
M
33
, M
12
=
M
12
. (4.45)
K
g
=
EI
l
3
K
11
K
12
0 0 0 0
K
T
12
K
11
K
12
0 0 0
0 K
T
12
K
11
K
12
0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0 K
11
K
12
0 0 0 0 K
T
12
K
22
, (4.46)
where
K
11
=
K
22
, K
22
=
K
33
, K
12
=
K
12
. (4.47)
After imposing the boundary conditions, dimension of the system [M
g
, K
g
, u
g
]
is reduced to 2n. Finally, using the Lagrange equations, equations of motion for
the whole structure are given in the form
M
g
u
g
+K
g
u
g
= 0. (4.48)
57
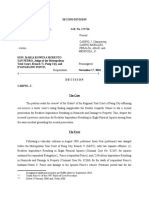
ValidationoftheFEMModel
Parameterstovalidatethemodel
- Usoroetal(1986).
- L1=L2=1m,
I1=I2=510
9
m
4
,
1=2=5Kg/mand
E=210
11
N/m
2
.
EachlinkdiscreTsedin4elements.
Resultsincloseagreement
23
Plot1(a):AngleandEndpointCoordinates
0 1 2 3 4 5
!1.6
!1.55
!1.5
!1.45
!
1
(
r
a
d
)
Initial Response
Usoro et al. (1986)
0 1 2 3 4 5
!0.1
!0.05
0
0.05
0.1
!
2
(
r
a
d
)
0 1 2 3 4 5
!0.1
!0.05
0
0.05
0.1
X
2
T
i
p
(
m
)
Time (s)
0 1 2 3 4 5
!2
!1.999
!1.998
!1.997
!1.996
Y
2
T
i
p
(
m
)
Time (s)
24
0 1 2 3 4 5
!5
0
5
x 10
!5
u
5
(
m
)
0 1 2 3 4 5
!4
!2
0
2
4
x 10
!4
u
9
(
m
)
0 1 2 3 4 5
!2
!1
0
1
2
x 10
!4
w
5
(
m
)
Time (s)
0 1 2 3 4 5
!4
!2
0
2
4
x 10
!4
w
9
(
m
)
Time (s)
u
5
(u
9
) = Flextural displacement of mid-point (end-point) of
Link 1
w
5
(w
9
) = Flextural displacement of mid-point (end-point) of
Link 2
Plot 1(b) : Flextural Displacements
25
0 1 2 3 4 5
!4
!2
0
2
4
x 10
!4
u
6
(
r
a
d
)
0 1 2 3 4 5
!5
0
5
x 10
!4
u
1
0
(
r
a
d
)
0 1 2 3 4 5
!4
!2
0
2
4
x 10
!4
w
6
(
r
a
d
)
Time (s)
0 1 2 3 4 5
!1
!0.5
0
0.5
1
x 10
!3
w
1
0
(
r
a
d
)
Time (s)
u
6
(u
10
) = Flextural slope of mid-point (end-point) of Link 1
w
6
(w
10
) = Flextural slope of mid-point (end-point) of Link 2
Plot 1(c) : Flextural Slopes
26
COMMANDSHAPING
!
1
!
2
+
0
!
1
0
!
2
!
First Mode Shaper Second Mode Shaper
0
Two!Mode Shaper
Convolution of two single-mode shapers
27
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
!3
!2
!1
0
1
2
3
4
Time
A
m
p
l
i
t
u
d
e
BasisofCommandShaping
28
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
!3
!2
!1
0
1
2
3
4
Time
A
m
p
l
i
t
u
d
e
BasisofCommandShaping...
29
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
!3
!2
!1
0
1
2
3
4
Time
A
m
p
l
i
t
u
d
e
BasisofCommandShaping...
30
SystemsResponsetoMultipleImpulses(SuperpositionPrinciple)
ImpulseResponseofaSecondOrderUnder-dampedSystem
DevelopmentofConstraintEquations
31
TransferFunctionofaGeneralUnder-Damped,Second-OrderSystem
CHAPTER 3. COMMAND SHAPING TECHNIQUES
the amplitudes (A
i
) and time locations (t
i
) of ZV shapers is outlined. It is well
known that the behavior of an n-th order system can be well represented by the
superposition of second-order systems. The transfer function of such a general,
underdamped, second-order system can be given as
G(s) =
2
n
s
2
+ 2
n
+
2
n
, (3.1)
where
n
and are the natural frequency and damping ratio of the underdamped
system respectively. The impulse response of a second-order system is given as
y
o
(t) =
A
o
1
2
e
n(tto)
sin(
n
1
2
(t t
o
)), (3.2)
where A
o
and t
o
are amplitude and time instant, when the impulse is applied.
Using the principle of superposition, response of the system to a sequence of N
impulses after the time of last impulse can be obtained as
y(t) =
N
i=1
A
i
1
2
e
n(tti)
sin(
n
1
2
(t t
i
)), (3.3)
where A
i
and t
i
are the amplitudes and time instants of the i-th impulse. Using
polar coordinates, the above equation can be written in more compact form as
y(t) = P sin(
d
t + ), (3.4)
where is the phase shift (unimportant here) and P is the residual vibration
amplitude given as
P =
i=1
P
i
cos(
d
t
i
)
2
+
i=1
P
i
sin(
d
t
i
)
2
, (3.5)
where
d
=
n
1
2
= Damped natural frequency, (3.6)
P
i
=
A
i
1
2
e
n(tti)
. (3.7)
To calculate P caused by an impulse sequence of N impulses, (3.5) is evaluated
at the time instant of last impulse, t = t
N
. Substituting the value of P
i
from
28
CHAPTER 3. COMMAND SHAPING TECHNIQUES
the amplitudes (A
i
) and time locations (t
i
) of ZV shapers is outlined. It is well
known that the behavior of an n-th order system can be well represented by the
superposition of second-order systems. The transfer function of such a general,
underdamped, second-order system can be given as
G(s) =
2
n
s
2
+ 2
n
+
2
n
, (3.1)
where
n
and are the natural frequency and damping ratio of the underdamped
system respectively. The impulse response of a second-order system is given as
y
o
(t) =
A
o
1
2
e
n(tto)
sin(
n
1
2
(t t
o
)), (3.2)
where A
o
and t
o
are amplitude and time instant, when the impulse is applied.
Using the principle of superposition, response of the system to a sequence of N
impulses after the time of last impulse can be obtained as
y(t) =
N
i=1
A
i
1
2
e
n(tti)
sin(
n
1
2
(t t
i
)), (3.3)
where A
i
and t
i
are the amplitudes and time instants of the i-th impulse. Using
polar coordinates, the above equation can be written in more compact form as
y(t) = P sin(
d
t + ), (3.4)
where is the phase shift (unimportant here) and P is the residual vibration
amplitude given as
P =
i=1
P
i
cos(
d
t
i
)
2
+
i=1
P
i
sin(
d
t
i
)
2
, (3.5)
where
d
=
n
1
2
= Damped natural frequency, (3.6)
P
i
=
A
i
1
2
e
n(tti)
. (3.7)
To calculate P caused by an impulse sequence of N impulses, (3.5) is evaluated
at the time instant of last impulse, t = t
N
. Substituting the value of P
i
from
28
CHAPTER 3. COMMAND SHAPING TECHNIQUES
the amplitudes (A
i
) and time locations (t
i
) of ZV shapers is outlined. It is well
known that the behavior of an n-th order system can be well represented by the
superposition of second-order systems. The transfer function of such a general,
underdamped, second-order system can be given as
G(s) =
2
n
s
2
+ 2
n
+
2
n
, (3.1)
where
n
and are the natural frequency and damping ratio of the underdamped
system respectively. The impulse response of a second-order system is given as
y
o
(t) =
A
o
1
2
e
n(tto)
sin(
n
1
2
(t t
o
)), (3.2)
where A
o
and t
o
are amplitude and time instant, when the impulse is applied.
Using the principle of superposition, response of the system to a sequence of N
impulses after the time of last impulse can be obtained as
y(t) =
N
i=1
A
i
1
2
e
n(tti)
sin(
n
1
2
(t t
i
)), (3.3)
where A
i
and t
i
are the amplitudes and time instants of the i-th impulse. Using
polar coordinates, the above equation can be written in more compact form as
y(t) = P sin(
d
t + ), (3.4)
where is the phase shift (unimportant here) and P is the residual vibration
amplitude given as
P =
i=1
P
i
cos(
d
t
i
)
2
+
i=1
P
i
sin(
d
t
i
)
2
, (3.5)
where
d
=
n
1
2
= Damped natural frequency, (3.6)
P
i
=
A
i
1
2
e
n(tti)
. (3.7)
To calculate P caused by an impulse sequence of N impulses, (3.5) is evaluated
at the time instant of last impulse, t = t
N
. Substituting the value of P
i
from
28
CHAPTER 3. COMMAND SHAPING TECHNIQUES
the amplitudes (A
i
) and time locations (t
i
) of ZV shapers is outlined. It is well
known that the behavior of an n-th order system can be well represented by the
superposition of second-order systems. The transfer function of such a general,
underdamped, second-order system can be given as
G(s) =
2
n
s
2
+ 2
n
+
2
n
, (3.1)
where
n
and are the natural frequency and damping ratio of the underdamped
system respectively. The impulse response of a second-order system is given as
y
o
(t) =
A
o
1
2
e
n(tto)
sin(
n
1
2
(t t
o
)), (3.2)
where A
o
and t
o
are amplitude and time instant, when the impulse is applied.
Using the principle of superposition, response of the system to a sequence of N
impulses after the time of last impulse can be obtained as
y(t) =
N
i=1
A
i
1
2
e
n(tti)
sin(
n
1
2
(t t
i
)), (3.3)
where A
i
and t
i
are the amplitudes and time instants of the i-th impulse. Using
polar coordinates, the above equation can be written in more compact form as
y(t) = P sin(
d
t + ), (3.4)
where is the phase shift (unimportant here) and P is the residual vibration
amplitude given as
P =
i=1
P
i
cos(
d
t
i
)
2
+
i=1
P
i
sin(
d
t
i
)
2
, (3.5)
where
d
=
n
1
2
= Damped natural frequency, (3.6)
P
i
=
A
i
1
2
e
n(tti)
. (3.7)
To calculate P caused by an impulse sequence of N impulses, (3.5) is evaluated
at the time instant of last impulse, t = t
N
. Substituting the value of P
i
from
28
CHAPTER 3. COMMAND SHAPING TECHNIQUES
the amplitudes (A
i
) and time locations (t
i
) of ZV shapers is outlined. It is well
known that the behavior of an n-th order system can be well represented by the
superposition of second-order systems. The transfer function of such a general,
underdamped, second-order system can be given as
G(s) =
2
n
s
2
+ 2
n
+
2
n
, (3.1)
where
n
and are the natural frequency and damping ratio of the underdamped
system respectively. The impulse response of a second-order system is given as
y
o
(t) =
A
o
1
2
e
n(tto)
sin(
n
1
2
(t t
o
)), (3.2)
where A
o
and t
o
are amplitude and time instant, when the impulse is applied.
Using the principle of superposition, response of the system to a sequence of N
impulses after the time of last impulse can be obtained as
y(t) =
N
i=1
A
i
1
2
e
n(tti)
sin(
n
1
2
(t t
i
)), (3.3)
where A
i
and t
i
are the amplitudes and time instants of the i-th impulse. Using
polar coordinates, the above equation can be written in more compact form as
y(t) = P sin(
d
t + ), (3.4)
where is the phase shift (unimportant here) and P is the residual vibration
amplitude given as
P =
i=1
P
i
cos(
d
t
i
)
2
+
i=1
P
i
sin(
d
t
i
)
2
, (3.5)
where
d
=
n
1
2
= Damped natural frequency, (3.6)
P
i
=
A
i
1
2
e
n(tti)
. (3.7)
To calculate P caused by an impulse sequence of N impulses, (3.5) is evaluated
at the time instant of last impulse, t = t
N
. Substituting the value of P
i
from
28
CHAPTER 3. COMMAND SHAPING TECHNIQUES
the amplitudes (A
i
) and time locations (t
i
) of ZV shapers is outlined. It is well
known that the behavior of an n-th order system can be well represented by the
superposition of second-order systems. The transfer function of such a general,
underdamped, second-order system can be given as
G(s) =
2
n
s
2
+ 2
n
+
2
n
, (3.1)
where
n
and are the natural frequency and damping ratio of the underdamped
system respectively. The impulse response of a second-order system is given as
y
o
(t) =
A
o
1
2
e
n(tto)
sin(
n
1
2
(t t
o
)), (3.2)
where A
o
and t
o
are amplitude and time instant, when the impulse is applied.
Using the principle of superposition, response of the system to a sequence of N
impulses after the time of last impulse can be obtained as
y(t) =
N
i=1
A
i
1
2
e
n(tti)
sin(
n
1
2
(t t
i
)), (3.3)
where A
i
and t
i
are the amplitudes and time instants of the i-th impulse. Using
polar coordinates, the above equation can be written in more compact form as
y(t) = P sin(
d
t + ), (3.4)
where is the phase shift (unimportant here) and P is the residual vibration
amplitude given as
P =
i=1
P
i
cos(
d
t
i
)
2
+
i=1
P
i
sin(
d
t
i
)
2
, (3.5)
where
d
=
n
1
2
= Damped natural frequency, (3.6)
P
i
=
A
i
1
2
e
n(tti)
. (3.7)
To calculate P caused by an impulse sequence of N impulses, (3.5) is evaluated
at the time instant of last impulse, t = t
N
. Substituting the value of P
i
from
28
InPolarCoordinates
CHAPTER 3. COMMAND SHAPING TECHNIQUES
the amplitudes (A
i
) and time locations (t
i
) of ZV shapers is outlined. It is well
known that the behavior of an n-th order system can be well represented by the
superposition of second-order systems. The transfer function of such a general,
underdamped, second-order system can be given as
G(s) =
2
n
s
2
+ 2
n
+
2
n
, (3.1)
where
n
and are the natural frequency and damping ratio of the underdamped
system respectively. The impulse response of a second-order system is given as
y
o
(t) =
A
o
1
2
e
n(tto)
sin(
n
1
2
(t t
o
)), (3.2)
where A
o
and t
o
are amplitude and time instant, when the impulse is applied.
Using the principle of superposition, response of the system to a sequence of N
impulses after the time of last impulse can be obtained as
y(t) =
N
i=1
A
i
1
2
e
n(tti)
sin(
n
1
2
(t t
i
)), (3.3)
where A
i
and t
i
are the amplitudes and time instants of the i-th impulse. Using
polar coordinates, the above equation can be written in more compact form as
y(t) = P sin(
d
t + ), (3.4)
where is the phase shift (unimportant here) and P is the residual vibration
amplitude given as
P =
i=1
P
i
cos(
d
t
i
)
2
+
i=1
P
i
sin(
d
t
i
)
2
, (3.5)
where
d
=
n
1
2
= Damped natural frequency, (3.6)
P
i
=
A
i
1
2
e
n(tti)
. (3.7)
To calculate P caused by an impulse sequence of N impulses, (3.5) is evaluated
at the time instant of last impulse, t = t
N
. Substituting the value of P
i
from
28
wherePistheresidualvibrationamplitudeandisthephaseshift.
CHAPTER 3. COMMAND SHAPING TECHNIQUES
the amplitudes (A
i
) and time locations (t
i
) of ZV shapers is outlined. It is well
known that the behavior of an n-th order system can be well represented by the
superposition of second-order systems. The transfer function of such a general,
underdamped, second-order system can be given as
G(s) =
2
n
s
2
+ 2
n
+
2
n
, (3.1)
where
n
and are the natural frequency and damping ratio of the underdamped
system respectively. The impulse response of a second-order system is given as
y
o
(t) =
A
o
1
2
e
n
(tt
o
)
sin(
n
1
2
(t t
o
)), (3.2)
where A
o
and t
o
are amplitude and time instant, when the impulse is applied.
Using the principle of superposition, response of the system to a sequence of N
impulses after the time of last impulse can be obtained as
y(t) =
N
i=1
A
i
1
2
e
n
(tt
i
)
sin(
n
1
2
(t t
i
)), (3.3)
where A
i
and t
i
are the amplitudes and time instants of the i-th impulse. Using
polar coordinates, the above equation can be written in more compact form as
y(t) = P sin(
d
t + ), (3.4)
where is the phase shift (unimportant here) and P is the residual vibration
amplitude given as
P =
i=1
P
i
cos(
d
t
i
)
2
+
i=1
P
i
sin(
d
t
i
)
2
, (3.5)
where
d
=
n
1
2
= Damped natural frequency, (3.6)
P
i
=
A
i
1
2
e
n
(tt
i
)
. (3.7)
To calculate P caused by an impulse sequence of N impulses, (3.5) is evaluated
at the time instant of last impulse, t = t
N
. Substituting the value of P
i
from
28
CHAPTER 3. COMMAND SHAPING TECHNIQUES
the amplitudes (A
i
) and time locations (t
i
) of ZV shapers is outlined. It is well
known that the behavior of an n-th order system can be well represented by the
superposition of second-order systems. The transfer function of such a general,
underdamped, second-order system can be given as
G(s) =
2
n
s
2
+ 2
n
+
2
n
, (3.1)
where
n
and are the natural frequency and damping ratio of the underdamped
system respectively. The impulse response of a second-order system is given as
y
o
(t) =
A
o
1
2
e
n
(tt
o
)
sin(
n
1
2
(t t
o
)), (3.2)
where A
o
and t
o
are amplitude and time instant, when the impulse is applied.
Using the principle of superposition, response of the system to a sequence of N
impulses after the time of last impulse can be obtained as
y(t) =
N
i=1
A
i
1
2
e
n
(tt
i
)
sin(
n
1
2
(t t
i
)), (3.3)
where A
i
and t
i
are the amplitudes and time instants of the i-th impulse. Using
polar coordinates, the above equation can be written in more compact form as
y(t) = P sin(
d
t + ), (3.4)
where is the phase shift (unimportant here) and P is the residual vibration
amplitude given as
P =
i=1
P
i
cos(
d
t
i
)
2
+
i=1
P
i
sin(
d
t
i
)
2
, (3.5)
where
d
=
n
1
2
= Damped natural frequency, (3.6)
P
i
=
A
i
1
2
e
n
(tt
i
)
. (3.7)
To calculate P caused by an impulse sequence of N impulses, (3.5) is evaluated
at the time instant of last impulse, t = t
N
. Substituting the value of P
i
from
28
CHAPTER 3. COMMAND SHAPING TECHNIQUES
the amplitudes (A
i
) and time locations (t
i
) of ZV shapers is outlined. It is well
known that the behavior of an n-th order system can be well represented by the
superposition of second-order systems. The transfer function of such a general,
underdamped, second-order system can be given as
G(s) =
2
n
s
2
+ 2
n
+
2
n
, (3.1)
where
n
and are the natural frequency and damping ratio of the underdamped
system respectively. The impulse response of a second-order system is given as
y
o
(t) =
A
o
1
2
e
n
(tt
o
)
sin(
n
1
2
(t t
o
)), (3.2)
where A
o
and t
o
are amplitude and time instant, when the impulse is applied.
Using the principle of superposition, response of the system to a sequence of N
impulses after the time of last impulse can be obtained as
y(t) =
N
i=1
A
i
1
2
e
n
(tt
i
)
sin(
n
1
2
(t t
i
)), (3.3)
where A
i
and t
i
are the amplitudes and time instants of the i-th impulse. Using
polar coordinates, the above equation can be written in more compact form as
y(t) = P sin(
d
t + ), (3.4)
where is the phase shift (unimportant here) and P is the residual vibration
amplitude given as
P =
i=1
P
i
cos(
d
t
i
)
2
+
i=1
P
i
sin(
d
t
i
)
2
, (3.5)
where
d
=
n
1
2
= Damped natural frequency, (3.6)
P
i
=
A
i
1
2
e
n
(tt
i
)
. (3.7)
To calculate P caused by an impulse sequence of N impulses, (3.5) is evaluated
at the time instant of last impulse, t = t
N
. Substituting the value of P
i
from
28
CHAPTER 3. COMMAND SHAPING TECHNIQUES
the amplitudes (A
i
) and time locations (t
i
) of ZV shapers is outlined. It is well
known that the behavior of an n-th order system can be well represented by the
superposition of second-order systems. The transfer function of such a general,
underdamped, second-order system can be given as
G(s) =
2
n
s
2
+ 2
n
+
2
n
, (3.1)
where
n
and are the natural frequency and damping ratio of the underdamped
system respectively. The impulse response of a second-order system is given as
y
o
(t) =
A
o
1
2
e
n
(tt
o
)
sin(
n
1
2
(t t
o
)), (3.2)
where A
o
and t
o
are amplitude and time instant, when the impulse is applied.
Using the principle of superposition, response of the system to a sequence of N
impulses after the time of last impulse can be obtained as
y(t) =
N
i=1
A
i
1
2
e
n
(tt
i
)
sin(
n
1
2
(t t
i
)), (3.3)
where A
i
and t
i
are the amplitudes and time instants of the i-th impulse. Using
polar coordinates, the above equation can be written in more compact form as
y(t) = P sin(
d
t + ), (3.4)
where is the phase shift (unimportant here) and P is the residual vibration
amplitude given as
P =
i=1
P
i
cos(
d
t
i
)
2
+
i=1
P
i
sin(
d
t
i
)
2
, (3.5)
where
d
=
n
1
2
= Damped natural frequency, (3.6)
P
i
=
A
i
1
2
e
n
(tt
i
)
. (3.7)
To calculate P caused by an impulse sequence of N impulses, (3.5) is evaluated
at the time instant of last impulse, t = t
N
. Substituting the value of P
i
from
28
DevelopmentofConstraintEquations
32
SubstitutingthevalueofP
i
intoP
Residualvibrationfromasingleimpulseofunitymagnitude
3.3. ZERO VIBRATION/TWO-IMPULSE SEQUENCE
(3.7) in (3.5), and taking constant terms out of the square root, the amplitude
of single-mode residual vibrations (refer [108, 109, 110]), as an outcome to a se-
quence of impulses, can be obtained as
P =
n
1
2
e
nt
N
i=1
A
i
e
nti
cos(
d
t
i
)
2
+
i=1
A
i
e
nti
sin(
d
t
i
)
2
.
(3.8)
To represent the above amplitude as a non-dimensional quantity (refer [86]), (3.8)
can be divided by the amplitude of a residual vibration from a single impulse of
a unity magnitude (P
), which is given as
P
=
n
1
2
. (3.9)
The resulting percentage of residual vibration expression i.e. V (
n
, ) =
P
P
,
represents the ratio of vibration with input shaping to that without input shaping.
Thus, the relative vibration expression (in percentage values) can be written as
V (
n
, ) = e
nt
N
[V
C
(
n
, )]
2
+ [V
S
(
n
, )]
2
,
V
C
(
n
, ) =
N
i=1
A
i
e
nti
cos(
d
t
i
),
V
S
(
n
, ) =
N
i=1
A
i
e
nti
sin(
d
t
i
).
(3.10)
The zero-vibration solution leads us to set V (
n
, ) = 0 and solve for the variables
of the shaper. However, since the Eqn. (3.10) is nonlinear and under-determined
in nature, innite possible solutions can exist. To avoid trivial solutions, i.e. zero-
valued and innite-valued impulses [111], it is better to put some constraints on
the system. Thus, the two-impulse sequence can be found by solving a nonlinear
system of equations as
V (
n
, ) = 0, (3.11)
2
i=1
A
i
= 1, (3.12)
A
i
> 0 i. (3.13)
29
Residualvibrationfromasingleimpulseofunitymagnitude
CHAPTER 3. COMMAND SHAPING TECHNIQUES
the amplitudes (A
i
) and time locations (t
i
) of ZV shapers is outlined. It is well
known that the behavior of an n-th order system can be well represented by the
superposition of second-order systems. The transfer function of such a general,
underdamped, second-order system can be given as
G(s) =
2
n
s
2
+ 2
n
+
2
n
, (3.1)
where
n
and are the natural frequency and damping ratio of the underdamped
system respectively. The impulse response of a second-order system is given as
y
o
(t) =
A
o
1
2
e
n
(tt
o
)
sin(
n
1
2
(t t
o
)), (3.2)
where A
o
and t
o
are amplitude and time instant, when the impulse is applied.
Using the principle of superposition, response of the system to a sequence of N
impulses after the time of last impulse can be obtained as
y(t) =
N
i=1
A
i
1
2
e
n
(tt
i
)
sin(
n
1
2
(t t
i
)), (3.3)
where A
i
and t
i
are the amplitudes and time instants of the i-th impulse. Using
polar coordinates, the above equation can be written in more compact form as
y(t) = P sin(
d
t + ), (3.4)
where is the phase shift (unimportant here) and P is the residual vibration
amplitude given as
P =
i=1
P
i
cos(
d
t
i
)
2
+
i=1
P
i
sin(
d
t
i
)
2
, (3.5)
where
d
=
n
1
2
= Damped natural frequency, (3.6)
P
i
=
A
i
1
2
e
n
(tt
i
)
. (3.7)
To calculate P caused by an impulse sequence of N impulses, (3.5) is evaluated
at the time instant of last impulse, t = t
N
. Substituting the value of P
i
from
28
CHAPTER 3. COMMAND SHAPING TECHNIQUES
the amplitudes (A
i
) and time locations (t
i
) of ZV shapers is outlined. It is well
known that the behavior of an n-th order system can be well represented by the
superposition of second-order systems. The transfer function of such a general,
underdamped, second-order system can be given as
G(s) =
2
n
s
2
+ 2
n
+
2
n
, (3.1)
where
n
and are the natural frequency and damping ratio of the underdamped
system respectively. The impulse response of a second-order system is given as
y
o
(t) =
A
o
1
2
e
n
(tt
o
)
sin(
n
1
2
(t t
o
)), (3.2)
where A
o
and t
o
are amplitude and time instant, when the impulse is applied.
Using the principle of superposition, response of the system to a sequence of N
impulses after the time of last impulse can be obtained as
y(t) =
N
i=1
A
i
1
2
e
n
(tt
i
)
sin(
n
1
2
(t t
i
)), (3.3)
where A
i
and t
i
are the amplitudes and time instants of the i-th impulse. Using
polar coordinates, the above equation can be written in more compact form as
y(t) = P sin(
d
t + ), (3.4)
where is the phase shift (unimportant here) and P is the residual vibration
amplitude given as
P =
i=1
P
i
cos(
d
t
i
)
2
+
i=1
P
i
sin(
d
t
i
)
2
, (3.5)
where
d
=
n
1
2
= Damped natural frequency, (3.6)
P
i
=
A
i
1
2
e
n
(tt
i
)
. (3.7)
To calculate P caused by an impulse sequence of N impulses, (3.5) is evaluated
at the time instant of last impulse, t = t
N
. Substituting the value of P
i
from
28
3.3. ZERO VIBRATION/TWO-IMPULSE SEQUENCE
(3.7) in (3.5), and taking constant terms out of the square root, the amplitude
of single-mode residual vibrations (refer [108, 109, 110]), as an outcome to a se-
quence of impulses, can be obtained as
P =
n
1
2
e
n
t
N
i=1
A
i
e
n
t
i
cos(
d
t
i
)
2
+
i=1
A
i
e
n
t
i
sin(
d
t
i
)
2
.
(3.8)
To represent the above amplitude as a non-dimensional quantity (refer [86]), (3.8)
can be divided by the amplitude of a residual vibration from a single impulse of
a unity magnitude (P
), which is given as
P
=
n
1
2
. (3.9)
The resulting percentage of residual vibration expression i.e. V (
n
, ) =
P
P
,
represents the ratio of vibration with input shaping to that without input shaping.
Thus, the relative vibration expression (in percentage values) can be written as
V (
n
, ) = e
n
t
N
[V
C
(
n
, )]
2
+ [V
S
(
n
, )]
2
,
V
C
(
n
, ) =
N
i=1
A
i
e
n
t
i
cos(
d
t
i
),
V
S
(
n
, ) =
N
i=1
A
i
e
n
t
i
sin(
d
t
i
).
(3.10)
The zero-vibration solution leads us to set V (
n
, ) = 0 and solve for the variables
of the shaper. However, since the Eqn. (3.10) is nonlinear and under-determined
in nature, innite possible solutions can exist. To avoid trivial solutions, i.e. zero-
valued and innite-valued impulses [111], it is better to put some constraints on
the system. Thus, the two-impulse sequence can be found by solving a nonlinear
system of equations as
V (
n
, ) = 0, (3.11)
2
i=1
A
i
= 1, (3.12)
A
i
> 0 i. (3.13)
29
3.3. ZERO VIBRATION/TWO-IMPULSE SEQUENCE
(3.7) in (3.5), and taking constant terms out of the square root, the amplitude
of single-mode residual vibrations (refer [108, 109, 110]), as an outcome to a se-
quence of impulses, can be obtained as
P =
n
1
2
e
n
t
N
i=1
A
i
e
n
t
i
cos(
d
t
i
)
2
+
i=1
A
i
e
n
t
i
sin(
d
t
i
)
2
.
(3.8)
To represent the above amplitude as a non-dimensional quantity (refer [86]), (3.8)
can be divided by the amplitude of a residual vibration from a single impulse of
a unity magnitude (P
), which is given as
P
=
n
1
2
. (3.9)
The resulting percentage of residual vibration expression i.e. V (
n
, ) =
P
P
,
represents the ratio of vibration with input shaping to that without input shaping.
Thus, the relative vibration expression (in percentage values) can be written as
V (
n
, ) = e
n
t
N
[V
C
(
n
, )]
2
+ [V
S
(
n
, )]
2
,
V
C
(
n
, ) =
N
i=1
A
i
e
n
t
i
cos(
d
t
i
),
V
S
(
n
, ) =
N
i=1
A
i
e
n
t
i
sin(
d
t
i
).
(3.10)
The zero-vibration solution leads us to set V (
n
, ) = 0 and solve for the variables
of the shaper. However, since the Eqn. (3.10) is nonlinear and under-determined
in nature, innite possible solutions can exist. To avoid trivial solutions, i.e. zero-
valued and innite-valued impulses [111], it is better to put some constraints on
the system. Thus, the two-impulse sequence can be found by solving a nonlinear
system of equations as
V (
n
, ) = 0, (3.11)
2
i=1
A
i
= 1, (3.12)
A
i
> 0 i. (3.13)
29
3.3. ZERO VIBRATION/TWO-IMPULSE SEQUENCE
(3.7) in (3.5), and taking constant terms out of the square root, the amplitude
of single-mode residual vibrations (refer [108, 109, 110]), as an outcome to a se-
quence of impulses, can be obtained as
P =
n
1
2
e
n
t
N
i=1
A
i
e
n
t
i
cos(
d
t
i
)
2
+
i=1
A
i
e
n
t
i
sin(
d
t
i
)
2
.
(3.8)
To represent the above amplitude as a non-dimensional quantity (refer [86]), (3.8)
can be divided by the amplitude of a residual vibration from a single impulse of
a unity magnitude (P
), which is given as
P
=
n
1
2
. (3.9)
The resulting percentage of residual vibration expression i.e. V (
n
, ) =
P
P
,
represents the ratio of vibration with input shaping to that without input shaping.
Thus, the relative vibration expression (in percentage values) can be written as
V (
n
, ) = e
n
t
N
[V
C
(
n
, )]
2
+ [V
S
(
n
, )]
2
,
V
C
(
n
, ) =
N
i=1
A
i
e
n
t
i
cos(
d
t
i
),
V
S
(
n
, ) =
N
i=1
A
i
e
n
t
i
sin(
d
t
i
).
(3.10)
The zero-vibration solution leads us to set V (
n
, ) = 0 and solve for the variables
of the shaper. However, since the Eqn. (3.10) is nonlinear and under-determined
in nature, innite possible solutions can exist. To avoid trivial solutions, i.e. zero-
valued and innite-valued impulses [111], it is better to put some constraints on
the system. Thus, the two-impulse sequence can be found by solving a nonlinear
system of equations as
V (
n
, ) = 0, (3.11)
2
i=1
A
i
= 1, (3.12)
A
i
> 0 i. (3.13)
29
ResidualVibrationAmplitude(inpercentagevalues)
33
where
3.3. ZERO VIBRATION/TWO-IMPULSE SEQUENCE
(3.7) in (3.5), and taking constant terms out of the square root, the amplitude
of single-mode residual vibrations (refer [108, 109, 110]), as an outcome to a se-
quence of impulses, can be obtained as
P =
n
1
2
e
nt
N
i=1
A
i
e
nti
cos(
d
t
i
)
2
+
i=1
A
i
e
nti
sin(
d
t
i
)
2
.
(3.8)
To represent the above amplitude as a non-dimensional quantity (refer [86]), (3.8)
can be divided by the amplitude of a residual vibration from a single impulse of
a unity magnitude (P
), which is given as
P
=
n
1
2
. (3.9)
The resulting percentage of residual vibration expression i.e. V (
n
, ) =
P
P
,
represents the ratio of vibration with input shaping to that without input shaping.
Thus, the relative vibration expression (in percentage values) can be written as
V (
n
, ) = e
nt
N
[V
C
(
n
, )]
2
+ [V
S
(
n
, )]
2
,
V
C
(
n
, ) =
N
i=1
A
i
e
nti
cos(
d
t
i
),
V
S
(
n
, ) =
N
i=1
A
i
e
nti
sin(
d
t
i
).
(3.10)
The zero-vibration solution leads us to set V (
n
, ) = 0 and solve for the variables
of the shaper. However, since the Eqn. (3.10) is nonlinear and under-determined
in nature, innite possible solutions can exist. To avoid trivial solutions, i.e. zero-
valued and innite-valued impulses [111], it is better to put some constraints on
the system. Thus, the two-impulse sequence can be found by solving a nonlinear
system of equations as
V (
n
, ) = 0, (3.11)
2
i=1
A
i
= 1, (3.12)
A
i
> 0 i. (3.13)
29
Theaboveequationisnonlinearandunderdeterminedinnature.Toavoidtrivial
solutions,itisbettertoputsomeconstraints.
NonlinearSystem
(4variablesand3constraints)
Toavoidmoredelay,choose
CHAPTER 3. COMMAND SHAPING TECHNIQUES
The above problem has four variables (A
1
, A
2
, t
1
, t
2
). The second equation, i.e.
Eqn. (3.12) signies that the shaped command signal produces the same rigid-
body motion as that of the reference signal. The next inequality in (3.13) avoids
saturation of the actuators. To avoid more delay, choose t
1
= 0, leading to a
nonlinear system with three unknowns only. Thus, Eqn. (3.10) can be written in
an expanded form as
V
C
(
n
, ) =
2
i=1
A
i
e
nti
cos(
d
t
i
) = A
1
e
nt1
cos(
d
t
1
) + A
2
e
nt2
cos(
d
t
2
) = 0,
(3.14)
V
S
(
n
, ) =
2
i=1
A
i
e
nti
sin(
d
t
i
) = A
1
e
nt1
sin(
d
t
1
) + A
2
e
nt2
sin(
d
t
2
) = 0.
(3.15)
Using t
1
= 0, the above equations can be written as
A
1
+ A
2
e
nt2
cos(
d
t
2
) = 0, (3.16)
A
2
e
nt2
sin(
d
t
2
) = 0. (3.17)
The non-trivial solution of Eqn. (3.17) gives
d
t
2
= k k = 1, 2, ... (3.18)
t
2
=
k
d
=
kT
d
2
k = 1, 2, ..., (3.19)
where T
d
=
2
d
is the time period of damped vibrations. In order to generate the
impulse sequence with minimum delay, choose k = 1, which results in
t
2
=
T
d
2
. (3.20)
With the above equation, two unknowns, i.e. the time instants of the shaper, are
known. Further, the amplitude constraint, i.e.
N
i=1
A
i
= 1, reduces to
30
whichleadstoanonlinearsystemwiththreeunknowns(A1,A2,t2)only.
3.3. ZERO VIBRATION/TWO-IMPULSE SEQUENCE
(3.7) in (3.5), and taking constant terms out of the square root, the amplitude
of single-mode residual vibrations (refer [108, 109, 110]), as an outcome to a se-
quence of impulses, can be obtained as
P =
n
1
2
e
n
t
N
i=1
A
i
e
n
t
i
cos(
d
t
i
)
2
+
i=1
A
i
e
n
t
i
sin(
d
t
i
)
2
.
(3.8)
To represent the above amplitude as a non-dimensional quantity (refer [86]), (3.8)
can be divided by the amplitude of a residual vibration from a single impulse of
a unity magnitude (P
), which is given as
P
=
n
1
2
. (3.9)
The resulting percentage of residual vibration expression i.e. V (
n
, ) =
P
P
,
represents the ratio of vibration with input shaping to that without input shaping.
Thus, the relative vibration expression (in percentage values) can be written as
V (
n
, ) = e
n
t
N
[V
C
(
n
, )]
2
+ [V
S
(
n
, )]
2
,
V
C
(
n
, ) =
N
i=1
A
i
e
n
t
i
cos(
d
t
i
),
V
S
(
n
, ) =
N
i=1
A
i
e
n
t
i
sin(
d
t
i
).
(3.10)
The zero-vibration solution leads us to set V (
n
, ) = 0 and solve for the variables
of the shaper. However, since the Eqn. (3.10) is nonlinear and under-determined
in nature, innite possible solutions can exist. To avoid trivial solutions, i.e. zero-
valued and innite-valued impulses [111], it is better to put some constraints on
the system. Thus, the two-impulse sequence can be found by solving a nonlinear
system of equations as
V (
n
, ) = 0, (3.11)
2
i=1
A
i
= 1, (3.12)
A
i
> 0 i. (3.13)
29
3.3. ZERO VIBRATION/TWO-IMPULSE SEQUENCE
(3.7) in (3.5), and taking constant terms out of the square root, the amplitude
of single-mode residual vibrations (refer [108, 109, 110]), as an outcome to a se-
quence of impulses, can be obtained as
P =
n
1
2
e
n
t
N
i=1
A
i
e
n
t
i
cos(
d
t
i
)
2
+
i=1
A
i
e
n
t
i
sin(
d
t
i
)
2
.
(3.8)
To represent the above amplitude as a non-dimensional quantity (refer [86]), (3.8)
can be divided by the amplitude of a residual vibration from a single impulse of
a unity magnitude (P
), which is given as
P
=
n
1
2
. (3.9)
The resulting percentage of residual vibration expression i.e. V (
n
, ) =
P
P
,
represents the ratio of vibration with input shaping to that without input shaping.
Thus, the relative vibration expression (in percentage values) can be written as
V (
n
, ) = e
n
t
N
[V
C
(
n
, )]
2
+ [V
S
(
n
, )]
2
,
V
C
(
n
, ) =
N
i=1
A
i
e
n
t
i
cos(
d
t
i
),
V
S
(
n
, ) =
N
i=1
A
i
e
n
t
i
sin(
d
t
i
).
(3.10)
The zero-vibration solution leads us to set V (
n
, ) = 0 and solve for the variables
of the shaper. However, since the Eqn. (3.10) is nonlinear and under-determined
in nature, innite possible solutions can exist. To avoid trivial solutions, i.e. zero-
valued and innite-valued impulses [111], it is better to put some constraints on
the system. Thus, the two-impulse sequence can be found by solving a nonlinear
system of equations as
V (
n
, ) = 0, (3.11)
2
i=1
A
i
= 1, (3.12)
A
i
> 0 i. (3.13)
29
CHAPTER 3. COMMAND SHAPING TECHNIQUES
The above problem has four variables (A
1
, A
2
, t
1
, t
2
). The second equation, i.e.
Eqn. (3.12) signies that the shaped command signal produces the same rigid-
body motion as that of the reference signal. The next inequality in (3.13) avoids
saturation of the actuators. To avoid more delay, choose t
1
= 0, leading to a
nonlinear system with three unknowns only. Thus, Eqn. (3.10) can be written in
an expanded form as
V
C
(
n
, ) =
2
i=1
A
i
e
n
t
i
cos(
d
t
i
) = A
1
e
n
t
1
cos(
d
t
1
) + A
2
e
n
t
2
cos(
d
t
2
) = 0,
(3.14)
V
S
(
n
, ) =
2
i=1
A
i
e
n
t
i
sin(
d
t
i
) = A
1
e
n
t
1
sin(
d
t
1
) + A
2
e
n
t
2
sin(
d
t
2
) = 0.
(3.15)
Using t
1
= 0, the above equations can be written as
A
1
+ A
2
e
n
t
2
cos(
d
t
2
) = 0, (3.16)
A
2
e
n
t
2
sin(
d
t
2
) = 0. (3.17)
The non-trivial solution of Eqn. (3.17) gives
d
t
2
= k k = 1, 2, ... (3.18)
t
2
=
k
d
=
kT
d
2
k = 1, 2, ..., (3.19)
where T
d
=
2
d
is the time period of damped vibrations. In order to generate the
impulse sequence with minimum delay, choose k = 1, which results in
t
2
=
T
d
2
. (3.20)
With the above equation, two unknowns, i.e. the time instants of the shaper, are
known. Further, the amplitude constraint, i.e.
N
i=1
A
i
= 1, reduces to
30
TwoImpulseSequence(ZVShaper)
34
ZVShaper
CHAPTER 3. COMMAND SHAPING TECHNIQUES
The above problem has four variables (A
1
, A
2
, t
1
, t
2
). The second equation, i.e.
Eqn. (3.12) signies that the shaped command signal produces the same rigid-
body motion as that of the reference signal. The next inequality in (3.13) avoids
saturation of the actuators. To avoid more delay, choose t
1
= 0, leading to a
nonlinear system with three unknowns only. Thus, Eqn. (3.10) can be written in
an expanded form as
V
C
(
n
, ) =
2
i=1
A
i
e
nti
cos(
d
t
i
) = A
1
e
nt1
cos(
d
t
1
) + A
2
e
nt2
cos(
d
t
2
) = 0,
(3.14)
V
S
(
n
, ) =
2
i=1
A
i
e
nti
sin(
d
t
i
) = A
1
e
nt1
sin(
d
t
1
) + A
2
e
nt2
sin(
d
t
2
) = 0.
(3.15)
Using t
1
= 0, the above equations can be written as
A
1
+ A
2
e
nt2
cos(
d
t
2
) = 0, (3.16)
A
2
e
nt2
sin(
d
t
2
) = 0. (3.17)
The non-trivial solution of Eqn. (3.17) gives
d
t
2
= k k = 1, 2, ... (3.18)
t
2
=
k
d
=
kT
d
2
k = 1, 2, ..., (3.19)
where T
d
=
2
d
is the time period of damped vibrations. In order to generate the
impulse sequence with minimum delay, choose k = 1, which results in
t
2
=
T
d
2
. (3.20)
With the above equation, two unknowns, i.e. the time instants of the shaper, are
known. Further, the amplitude constraint, i.e.
N
i=1
A
i
= 1, reduces to
30
CHAPTER 3. COMMAND SHAPING TECHNIQUES
The above problem has four variables (A
1
, A
2
, t
1
, t
2
). The second equation, i.e.
Eqn. (3.12) signies that the shaped command signal produces the same rigid-
body motion as that of the reference signal. The next inequality in (3.13) avoids
saturation of the actuators. To avoid more delay, choose t
1
= 0, leading to a
nonlinear system with three unknowns only. Thus, Eqn. (3.10) can be written in
an expanded form as
V
C
(
n
, ) =
2
i=1
A
i
e
nti
cos(
d
t
i
) = A
1
e
nt1
cos(
d
t
1
) + A
2
e
nt2
cos(
d
t
2
) = 0,
(3.14)
V
S
(
n
, ) =
2
i=1
A
i
e
nti
sin(
d
t
i
) = A
1
e
nt1
sin(
d
t
1
) + A
2
e
nt2
sin(
d
t
2
) = 0.
(3.15)
Using t
1
= 0, the above equations can be written as
A
1
+ A
2
e
nt2
cos(
d
t
2
) = 0, (3.16)
A
2
e
nt2
sin(
d
t
2
) = 0. (3.17)
The non-trivial solution of Eqn. (3.17) gives
d
t
2
= k k = 1, 2, ... (3.18)
t
2
=
k
d
=
kT
d
2
k = 1, 2, ..., (3.19)
where T
d
=
2
d
is the time period of damped vibrations. In order to generate the
impulse sequence with minimum delay, choose k = 1, which results in
t
2
=
T
d
2
. (3.20)
With the above equation, two unknowns, i.e. the time instants of the shaper, are
known. Further, the amplitude constraint, i.e.
N
i=1
A
i
= 1, reduces to
30
CHAPTER 3. COMMAND SHAPING TECHNIQUES
The above problem has four variables (A
1
, A
2
, t
1
, t
2
). The second equation, i.e.
Eqn. (3.12) signies that the shaped command signal produces the same rigid-
body motion as that of the reference signal. The next inequality in (3.13) avoids
saturation of the actuators. To avoid more delay, choose t
1
= 0, leading to a
nonlinear system with three unknowns only. Thus, Eqn. (3.10) can be written in
an expanded form as
V
C
(
n
, ) =
2
i=1
A
i
e
nti
cos(
d
t
i
) = A
1
e
nt1
cos(
d
t
1
) + A
2
e
nt2
cos(
d
t
2
) = 0,
(3.14)
V
S
(
n
, ) =
2
i=1
A
i
e
nti
sin(
d
t
i
) = A
1
e
nt1
sin(
d
t
1
) + A
2
e
nt2
sin(
d
t
2
) = 0.
(3.15)
Using t
1
= 0, the above equations can be written as
A
1
+ A
2
e
nt2
cos(
d
t
2
) = 0, (3.16)
A
2
e
nt2
sin(
d
t
2
) = 0. (3.17)
The non-trivial solution of Eqn. (3.17) gives
d
t
2
= k k = 1, 2, ... (3.18)
t
2
=
k
d
=
kT
d
2
k = 1, 2, ..., (3.19)
where T
d
=
2
d
is the time period of damped vibrations. In order to generate the
impulse sequence with minimum delay, choose k = 1, which results in
t
2
=
T
d
2
. (3.20)
With the above equation, two unknowns, i.e. the time instants of the shaper, are
known. Further, the amplitude constraint, i.e.
N
i=1
A
i
= 1, reduces to
30
Inexpandedform
Witht1=0,theaboveequationscanbewrittenas
CHAPTER 3. COMMAND SHAPING TECHNIQUES
The above problem has four variables (A
1
, A
2
, t
1
, t
2
). The second equation, i.e.
Eqn. (3.12) signies that the shaped command signal produces the same rigid-
body motion as that of the reference signal. The next inequality in (3.13) avoids
saturation of the actuators. To avoid more delay, choose t
1
= 0, leading to a
nonlinear system with three unknowns only. Thus, Eqn. (3.10) can be written in
an expanded form as
V
C
(
n
, ) =
2
i=1
A
i
e
nti
cos(
d
t
i
) = A
1
e
nt1
cos(
d
t
1
) + A
2
e
nt2
cos(
d
t
2
) = 0,
(3.14)
V
S
(
n
, ) =
2
i=1
A
i
e
nti
sin(
d
t
i
) = A
1
e
nt1
sin(
d
t
1
) + A
2
e
nt2
sin(
d
t
2
) = 0.
(3.15)
Using t
1
= 0, the above equations can be written as
A
1
+ A
2
e
nt2
cos(
d
t
2
) = 0, (3.16)
A
2
e
nt2
sin(
d
t
2
) = 0. (3.17)
The non-trivial solution of Eqn. (3.17) gives
d
t
2
= k k = 1, 2, ... (3.18)
t
2
=
k
d
=
kT
d
2
k = 1, 2, ..., (3.19)
where T
d
=
2
d
is the time period of damped vibrations. In order to generate the
impulse sequence with minimum delay, choose k = 1, which results in
t
2
=
T
d
2
. (3.20)
With the above equation, two unknowns, i.e. the time instants of the shaper, are
known. Further, the amplitude constraint, i.e.
N
i=1
A
i
= 1, reduces to
30
CHAPTER 3. COMMAND SHAPING TECHNIQUES
The above problem has four variables (A
1
, A
2
, t
1
, t
2
). The second equation, i.e.
Eqn. (3.12) signies that the shaped command signal produces the same rigid-
body motion as that of the reference signal. The next inequality in (3.13) avoids
saturation of the actuators. To avoid more delay, choose t
1
= 0, leading to a
nonlinear system with three unknowns only. Thus, Eqn. (3.10) can be written in
an expanded form as
V
C
(
n
, ) =
2
i=1
A
i
e
n
t
i
cos(
d
t
i
) = A
1
e
n
t
1
cos(
d
t
1
) + A
2
e
n
t
2
cos(
d
t
2
) = 0,
(3.14)
V
S
(
n
, ) =
2
i=1
A
i
e
n
t
i
sin(
d
t
i
) = A
1
e
n
t
1
sin(
d
t
1
) + A
2
e
n
t
2
sin(
d
t
2
) = 0.
(3.15)
Using t
1
= 0, the above equations can be written as
A
1
+ A
2
e
n
t
2
cos(
d
t
2
) = 0, (3.16)
A
2
e
n
t
2
sin(
d
t
2
) = 0. (3.17)
The non-trivial solution of Eqn. (3.17) gives
d
t
2
= k k = 1, 2, ... (3.18)
t
2
=
k
d
=
kT
d
2
k = 1, 2, ..., (3.19)
where T
d
=
2
d
is the time period of damped vibrations. In order to generate the
impulse sequence with minimum delay, choose k = 1, which results in
t
2
=
T
d
2
. (3.20)
With the above equation, two unknowns, i.e. the time instants of the shaper, are
known. Further, the amplitude constraint, i.e.
N
i=1
A
i
= 1, reduces to
30
CHAPTER 3. COMMAND SHAPING TECHNIQUES
The above problem has four variables (A
1
, A
2
, t
1
, t
2
). The second equation, i.e.
Eqn. (3.12) signies that the shaped command signal produces the same rigid-
body motion as that of the reference signal. The next inequality in (3.13) avoids
saturation of the actuators. To avoid more delay, choose t
1
= 0, leading to a
nonlinear system with three unknowns only. Thus, Eqn. (3.10) can be written in
an expanded form as
V
C
(
n
, ) =
2
i=1
A
i
e
n
t
i
cos(
d
t
i
) = A
1
e
n
t
1
cos(
d
t
1
) + A
2
e
n
t
2
cos(
d
t
2
) = 0,
(3.14)
V
S
(
n
, ) =
2
i=1
A
i
e
n
t
i
sin(
d
t
i
) = A
1
e
n
t
1
sin(
d
t
1
) + A
2
e
n
t
2
sin(
d
t
2
) = 0.
(3.15)
Using t
1
= 0, the above equations can be written as
A
1
+ A
2
e
n
t
2
cos(
d
t
2
) = 0, (3.16)
A
2
e
n
t
2
sin(
d
t
2
) = 0. (3.17)
The non-trivial solution of Eqn. (3.17) gives
d
t
2
= k k = 1, 2, ... (3.18)
t
2
=
k
d
=
kT
d
2
k = 1, 2, ..., (3.19)
where T
d
=
2
d
is the time period of damped vibrations. In order to generate the
impulse sequence with minimum delay, choose k = 1, which results in
t
2
=
T
d
2
. (3.20)
With the above equation, two unknowns, i.e. the time instants of the shaper, are
known. Further, the amplitude constraint, i.e.
N
i=1
A
i
= 1, reduces to
30
CHAPTER 3. COMMAND SHAPING TECHNIQUES
The above problem has four variables (A
1
, A
2
, t
1
, t
2
). The second equation, i.e.
Eqn. (3.12) signies that the shaped command signal produces the same rigid-
body motion as that of the reference signal. The next inequality in (3.13) avoids
saturation of the actuators. To avoid more delay, choose t
1
= 0, leading to a
nonlinear system with three unknowns only. Thus, Eqn. (3.10) can be written in
an expanded form as
V
C
(
n
, ) =
2
i=1
A
i
e
n
t
i
cos(
d
t
i
) = A
1
e
n
t
1
cos(
d
t
1
) + A
2
e
n
t
2
cos(
d
t
2
) = 0,
(3.14)
V
S
(
n
, ) =
2
i=1
A
i
e
n
t
i
sin(
d
t
i
) = A
1
e
n
t
1
sin(
d
t
1
) + A
2
e
n
t
2
sin(
d
t
2
) = 0.
(3.15)
Using t
1
= 0, the above equations can be written as
A
1
+ A
2
e
n
t
2
cos(
d
t
2
) = 0, (3.16)
A
2
e
n
t
2
sin(
d
t
2
) = 0. (3.17)
The non-trivial solution of Eqn. (3.17) gives
d
t
2
= k k = 1, 2, ... (3.18)
t
2
=
k
d
=
kT
d
2
k = 1, 2, ..., (3.19)
where T
d
=
2
d
is the time period of damped vibrations. In order to generate the
impulse sequence with minimum delay, choose k = 1, which results in
t
2
=
T
d
2
. (3.20)
With the above equation, two unknowns, i.e. the time instants of the shaper, are
known. Further, the amplitude constraint, i.e.
N
i=1
A
i
= 1, reduces to
30
3.4. GRAPHICAL REPRESENTATION OF AN IMPULSE SEQUENCE
A
1
+ A
2
= 1. (3.21)
Substitution of Eqns. (3.20) and (3.21) in (3.16) gives
A
1
+ (1 A
1
)e
1
2
= 0, (3.22)
A
1
=
1
1 + e
1
2
=
1
1 + M
, (3.23)
where
M = e
1
2
. (3.24)
Further, A
2
can be found by substituting Eqn. (3.23) into (3.21)
A
2
=
M
1 + M
. (3.25)
Finally, the ZV shaper in compact form can be written as
A
t
2
=
1
1+M
M
1+M
0
. (3.26)
The ZV shaper is highly susceptible to modeling errors and parametric uncer-
tainties. That is why it is being called as a non-robust shaper. To tackle this
problem, robustness issue as well as more robust shapers are presented in next
sections.
3.4 Graphical Representation of an Impulse Se-
quence
As discussed in the previous section, one way to nd the impulse response of
the system to multiple impulses is the analytical approach, in which principle
of superposition is used to calculate the residual vibration amplitude and phase
shift. An alternative method to do the similar process is the graphical approach,
which is also known as Vector Diagram Approach [112]. In this approach, the
vectors arising from several individual impulses are drawn on a vector diagram,
31
3.4. GRAPHICAL REPRESENTATION OF AN IMPULSE SEQUENCE
A
1
+ A
2
= 1. (3.21)
Substitution of Eqns. (3.20) and (3.21) in (3.16) gives
A
1
+ (1 A
1
)e
1
2
= 0, (3.22)
A
1
=
1
1 + e
1
2
=
1
1 + M
, (3.23)
where
M = e
1
2
. (3.24)
Further, A
2
can be found by substituting Eqn. (3.23) into (3.21)
A
2
=
M
1 + M
. (3.25)
Finally, the ZV shaper in compact form can be written as
A
t
2
=
1
1+M
M
1+M
0
. (3.26)
The ZV shaper is highly susceptible to modeling errors and parametric uncer-
tainties. That is why it is being called as a non-robust shaper. To tackle this
problem, robustness issue as well as more robust shapers are presented in next
sections.
3.4 Graphical Representation of an Impulse Se-
quence
As discussed in the previous section, one way to nd the impulse response of
the system to multiple impulses is the analytical approach, in which principle
of superposition is used to calculate the residual vibration amplitude and phase
shift. An alternative method to do the similar process is the graphical approach,
which is also known as Vector Diagram Approach [112]. In this approach, the
vectors arising from several individual impulses are drawn on a vector diagram,
31
where
Three Impulse Sequence (ZVD Shaper)
Four Impulse Sequence (ZVDD Shaper)
Robustness of Command Shaping
35
3.5. ROBUSTNESS OF AN INPUT SHAPER
3.5 Robustness of an Input Shaper
As mentioned earlier, the input shaper variables, i.e. amplitudes and time loca-
tions (instants) of the impulses are functions of natural frequencies and damping
ratios of the physical system. The success of input shaping technique depends
purely on the accuracy of the mathematical model of the physical system. Due to
parametric uncertainties and modeling inaccuracies, deriving an accurate math-
ematical model is quite challenging. In such a scenario, input shaping will not
produce a zero vibration response. The input shaper can be made insensitive to
errors in natural frequencies of the system by setting
V (
n
,)
n
= 0. Solving for the
shaper parameters after the addition of this constraint results in a three-impulse
sequence, which is also known as Zero Vibration and Derivative (ZVD) shaper.
The ZVD shaper [81] is given as
A
t
3
=
1
1+2M+M
2
2M
1+2M+M
2
M
2
1+2M+M
2
0
d
2
. (3.29)
This shaper is typically used where a fair amount of uncertainty can not be
neglected in the system parameters. It can be seen that the increase in robustness
of ZVD shaper is earned at the cost of a marginal time penalty, which increases
the time-lag of the system. The length (duration) of the ZVD shaper is exactly
twice that of the ZV shaper. The robustness of the input shaper can be further
increased by taking one step ahead i.e. setting
2
V (
n
,)
2
n
= 0, which results in a
four-impulse sequence [86] as
A
t
4
=
1
1+3M+3M
2
+M
3
3M
1+3M+3M
2
+M
3
3M
2
1+3M+3M
2
+M
3
M
3
1+3M+3M
2
+M
3
0
d
2
d
3
(3.30)
The above four-impulse sequence is also known as Zero Vibration and Dou-
ble Derivative (ZVDD) shaper. Further, to achieve more insensitivity, Extra-
33
3.5. ROBUSTNESS OF AN INPUT SHAPER
3.5 Robustness of an Input Shaper
As mentioned earlier, the input shaper variables, i.e. amplitudes and time loca-
tions (instants) of the impulses are functions of natural frequencies and damping
ratios of the physical system. The success of input shaping technique depends
purely on the accuracy of the mathematical model of the physical system. Due to
parametric uncertainties and modeling inaccuracies, deriving an accurate math-
ematical model is quite challenging. In such a scenario, input shaping will not
produce a zero vibration response. The input shaper can be made insensitive to
errors in natural frequencies of the system by setting
V (
n
,)
n
= 0. Solving for the
shaper parameters after the addition of this constraint results in a three-impulse
sequence, which is also known as Zero Vibration and Derivative (ZVD) shaper.
The ZVD shaper [81] is given as
A
t
3
=
1
1+2M+M
2
2M
1+2M+M
2
M
2
1+2M+M
2
0
d
2
. (3.29)
This shaper is typically used where a fair amount of uncertainty can not be
neglected in the system parameters. It can be seen that the increase in robustness
of ZVD shaper is earned at the cost of a marginal time penalty, which increases
the time-lag of the system. The length (duration) of the ZVD shaper is exactly
twice that of the ZV shaper. The robustness of the input shaper can be further
increased by taking one step ahead i.e. setting
2
V (
n
,)
2
n
= 0, which results in a
four-impulse sequence [86] as
A
t
4
=
1
1+3M+3M
2
+M
3
3M
1+3M+3M
2
+M
3
3M
2
1+3M+3M
2
+M
3
M
3
1+3M+3M
2
+M
3
0
d
2
d
3
(3.30)
The above four-impulse sequence is also known as Zero Vibration and Dou-
ble Derivative (ZVDD) shaper. Further, to achieve more insensitivity, Extra-
33
3.5. ROBUSTNESS OF AN INPUT SHAPER
3.5 Robustness of an Input Shaper
As mentioned earlier, the input shaper variables, i.e. amplitudes and time loca-
tions (instants) of the impulses are functions of natural frequencies and damping
ratios of the physical system. The success of input shaping technique depends
purely on the accuracy of the mathematical model of the physical system. Due to
parametric uncertainties and modeling inaccuracies, deriving an accurate math-
ematical model is quite challenging. In such a scenario, input shaping will not
produce a zero vibration response. The input shaper can be made insensitive to
errors in natural frequencies of the system by setting
V (
n
,)
n
= 0. Solving for the
shaper parameters after the addition of this constraint results in a three-impulse
sequence, which is also known as Zero Vibration and Derivative (ZVD) shaper.
The ZVD shaper [81] is given as
A
t
3
=
1
1+2M+M
2
2M
1+2M+M
2
M
2
1+2M+M
2
0
d
2
. (3.29)
This shaper is typically used where a fair amount of uncertainty can not be
neglected in the system parameters. It can be seen that the increase in robustness
of ZVD shaper is earned at the cost of a marginal time penalty, which increases
the time-lag of the system. The length (duration) of the ZVD shaper is exactly
twice that of the ZV shaper. The robustness of the input shaper can be further
increased by taking one step ahead i.e. setting
2
V (
n
,)
2
n
= 0, which results in a
four-impulse sequence [86] as
A
t
4
=
1
1+3M+3M
2
+M
3
3M
1+3M+3M
2
+M
3
3M
2
1+3M+3M
2
+M
3
M
3
1+3M+3M
2
+M
3
0
d
2
d
3
(3.30)
The above four-impulse sequence is also known as Zero Vibration and Dou-
ble Derivative (ZVDD) shaper. Further, to achieve more insensitivity, Extra-
33
Sensitivity Curve
!!"!##$
m
5
10
15
20
25
0
0.7
0.8 0.9 1.3 1.2 1.1 1.0
30
0.06
0.29
0.40
V
tol
P
e
r
c
e
n
t
a
g
e
V
i
b
r
a
t
i
o
n
(
P
R
V
)
Normalized Frequency
ZV Shaper
Robust ZVD Shaper
Very Robust Shaper
36
CONTROLLERDESIGN
Linearobserverbasedoptimalfeedbackterm
NonlinearFeedforwardControl
Thefeedforwardcontrolactionisgivenas
Bestutilizedforfastandrepetitivemoves.
Ecientsolutionolinecomputation(alongthenominaltrajectory).
Controlaction
NonlinearfeedforwardControl
Inputshaper
Thecontrollerconsistsofthreeparts
37
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
the control torques in real time. The use of feedforward control provides an
ecient solution to this problem as the whole computation is done o-line along
the nominal trajectory. Given the desired positions (
d
(t)), velocities (
d
(t)) and
accelerations (
d
(t)) in joint space, joint torques are calculated by the dynamic
inversion. The feedforward control action [121] is given as
u
ff
= M(
d
)
d
+n(
d
,
d
) +g(
d
) +K
d
, (5.38)
It can be seen from the above equation that feedforward control is nonlinear and
comes under the category of open-loop control as it does not depend on q and q.
5.4.2 Linear feedback control
In this section, the compensator design is presented, which is based on reduced-
order observer as all the states of exible manipulator are not measurable. The
plant state-vector x(t) can be partitioned as x(t) =
x
m
(t)
T
, x
u
(t)
T
T
, where
x
m
(t) is the vector of measured state variables and x
u
(t) is the vector of unmea-
sured state variables. The vector of measured outputs i.e. y(t) can directly be
chosen as equal to x
m
(t) or any linear combination of all the state variables of
x
m
(t). The output equation is given as
y(t) = Cx
m
(t), (5.39)
whete C is a constant, square matrix, indicating the same number of outputs
as the dimension of x
m
(t). The choice of C = I means that all the elements of
x
m
(t) are directly measurable. The plant state-equation (5.17) can be expressed
in partitioned form as
x
m
(t) = A
mm
x
m
(t) +A
mu
x
u
(t) +B
m
u(t), (5.40)
x
u
(t) = A
um
x
m
(t) +A
uu
x
u
(t) +B
u
u(t), (5.41)
where the state coecient matrices in partitioned form can be expressed as
A =
A
mm
A
mu
A
um
A
uu
, B =
B
m
B
u
. (5.42)
88
Plantsstateequation(partitionedform)
38
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
the control torques in real time. The use of feedforward control provides an
ecient solution to this problem as the whole computation is done o-line along
the nominal trajectory. Given the desired positions (
d
(t)), velocities (
d
(t)) and
accelerations (
d
(t)) in joint space, joint torques are calculated by the dynamic
inversion. The feedforward control action [121] is given as
u
ff
= M(
d
)
d
+n(
d
,
d
) +g(
d
) +K
d
, (5.38)
It can be seen from the above equation that feedforward control is nonlinear and
comes under the category of open-loop control as it does not depend on q and q.
5.4.2 Linear feedback control
In this section, the compensator design is presented, which is based on reduced-
order observer as all the states of exible manipulator are not measurable. The
plant state-vector x(t) can be partitioned as x(t) =
x
m
(t)
T
, x
u
(t)
T
T
, where
x
m
(t) is the vector of measured state variables and x
u
(t) is the vector of unmea-
sured state variables. The vector of measured outputs i.e. y(t) can directly be
chosen as equal to x
m
(t) or any linear combination of all the state variables of
x
m
(t). The output equation is given as
y(t) = Cx
m
(t), (5.39)
whete C is a constant, square matrix, indicating the same number of outputs
as the dimension of x
m
(t). The choice of C = I means that all the elements of
x
m
(t) are directly measurable. The plant state-equation (5.17) can be expressed
in partitioned form as
x
m
(t) = A
mm
x
m
(t) +A
mu
x
u
(t) +B
m
u(t), (5.40)
x
u
(t) = A
um
x
m
(t) +A
uu
x
u
(t) +B
u
u(t), (5.41)
where the state coecient matrices in partitioned form can be expressed as
A =
A
mm
A
mu
A
um
A
uu
, B =
B
m
B
u
. (5.42)
88
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
the control torques in real time. The use of feedforward control provides an
ecient solution to this problem as the whole computation is done o-line along
the nominal trajectory. Given the desired positions (
d
(t)), velocities (
d
(t)) and
accelerations (
d
(t)) in joint space, joint torques are calculated by the dynamic
inversion. The feedforward control action [121] is given as
u
ff
= M(
d
)
d
+n(
d
,
d
) +g(
d
) +K
d
, (5.38)
It can be seen from the above equation that feedforward control is nonlinear and
comes under the category of open-loop control as it does not depend on q and q.
5.4.2 Linear feedback control
In this section, the compensator design is presented, which is based on reduced-
order observer as all the states of exible manipulator are not measurable. The
plant state-vector x(t) can be partitioned as x(t) =
x
m
(t)
T
, x
u
(t)
T
T
, where
x
m
(t) is the vector of measured state variables and x
u
(t) is the vector of unmea-
sured state variables. The vector of measured outputs i.e. y(t) can directly be
chosen as equal to x
m
(t) or any linear combination of all the state variables of
x
m
(t). The output equation is given as
y(t) = Cx
m
(t), (5.39)
whete C is a constant, square matrix, indicating the same number of outputs
as the dimension of x
m
(t). The choice of C = I means that all the elements of
x
m
(t) are directly measurable. The plant state-equation (5.17) can be expressed
in partitioned form as
x
m
(t) = A
mm
x
m
(t) +A
mu
x
u
(t) +B
m
u(t), (5.40)
x
u
(t) = A
um
x
m
(t) +A
uu
x
u
(t) +B
u
u(t), (5.41)
where the state coecient matrices in partitioned form can be expressed as
A =
A
mm
A
mu
A
um
A
uu
, B =
B
m
B
u
. (5.42)
88
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
the control torques in real time. The use of feedforward control provides an
ecient solution to this problem as the whole computation is done o-line along
the nominal trajectory. Given the desired positions (
d
(t)), velocities (
d
(t)) and
accelerations (
d
(t)) in joint space, joint torques are calculated by the dynamic
inversion. The feedforward control action [121] is given as
u
ff
= M(
d
)
d
+n(
d
,
d
) +g(
d
) +K
d
, (5.38)
It can be seen from the above equation that feedforward control is nonlinear and
comes under the category of open-loop control as it does not depend on q and q.
5.4.2 Linear feedback control
In this section, the compensator design is presented, which is based on reduced-
order observer as all the states of exible manipulator are not measurable. The
plant state-vector x(t) can be partitioned as x(t) =
x
m
(t)
T
, x
u
(t)
T
T
, where
x
m
(t) is the vector of measured state variables and x
u
(t) is the vector of unmea-
sured state variables. The vector of measured outputs i.e. y(t) can directly be
chosen as equal to x
m
(t) or any linear combination of all the state variables of
x
m
(t). The output equation is given as
y(t) = Cx
m
(t), (5.39)
whete C is a constant, square matrix, indicating the same number of outputs
as the dimension of x
m
(t). The choice of C = I means that all the elements of
x
m
(t) are directly measurable. The plant state-equation (5.17) can be expressed
in partitioned form as
x
m
(t) = A
mm
x
m
(t) +A
mu
x
u
(t) +B
m
u(t), (5.40)
x
u
(t) = A
um
x
m
(t) +A
uu
x
u
(t) +B
u
u(t), (5.41)
where the state coecient matrices in partitioned form can be expressed as
A =
A
mm
A
mu
A
um
A
uu
, B =
B
m
B
u
. (5.42)
88
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
the control torques in real time. The use of feedforward control provides an
ecient solution to this problem as the whole computation is done o-line along
the nominal trajectory. Given the desired positions (
d
(t)), velocities (
d
(t)) and
accelerations (
d
(t)) in joint space, joint torques are calculated by the dynamic
inversion. The feedforward control action [121] is given as
u
ff
= M(
d
)
d
+n(
d
,
d
) +g(
d
) +K
d
, (5.38)
It can be seen from the above equation that feedforward control is nonlinear and
comes under the category of open-loop control as it does not depend on q and q.
5.4.2 Linear feedback control
In this section, the compensator design is presented, which is based on reduced-
order observer as all the states of exible manipulator are not measurable. The
plant state-vector x(t) can be partitioned as x(t) =
x
m
(t)
T
, x
u
(t)
T
T
, where
x
m
(t) is the vector of measured state variables and x
u
(t) is the vector of unmea-
sured state variables. The vector of measured outputs i.e. y(t) can directly be
chosen as equal to x
m
(t) or any linear combination of all the state variables of
x
m
(t). The output equation is given as
y(t) = Cx
m
(t), (5.39)
whete C is a constant, square matrix, indicating the same number of outputs
as the dimension of x
m
(t). The choice of C = I means that all the elements of
x
m
(t) are directly measurable. The plant state-equation (5.17) can be expressed
in partitioned form as
x
m
(t) = A
mm
x
m
(t) +A
mu
x
u
(t) +B
m
u(t), (5.40)
x
u
(t) = A
um
x
m
(t) +A
uu
x
u
(t) +B
u
u(t), (5.41)
where the state coecient matrices in partitioned form can be expressed as
A =
A
mm
A
mu
A
um
A
uu
, B =
B
m
B
u
. (5.42)
88
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
the control torques in real time. The use of feedforward control provides an
ecient solution to this problem as the whole computation is done o-line along
the nominal trajectory. Given the desired positions (
d
(t)), velocities (
d
(t)) and
accelerations (
d
(t)) in joint space, joint torques are calculated by the dynamic
inversion. The feedforward control action [121] is given as
u
ff
= M(
d
)
d
+n(
d
,
d
) +g(
d
) +K
d
, (5.38)
It can be seen from the above equation that feedforward control is nonlinear and
comes under the category of open-loop control as it does not depend on q and q.
5.4.2 Linear feedback control
In this section, the compensator design is presented, which is based on reduced-
order observer as all the states of exible manipulator are not measurable. The
plant state-vector x(t) can be partitioned as x(t) =
x
m
(t)
T
, x
u
(t)
T
T
, where
x
m
(t) is the vector of measured state variables and x
u
(t) is the vector of unmea-
sured state variables. The vector of measured outputs i.e. y(t) can directly be
chosen as equal to x
m
(t) or any linear combination of all the state variables of
x
m
(t). The output equation is given as
y(t) = Cx
m
(t), (5.39)
whete C is a constant, square matrix, indicating the same number of outputs
as the dimension of x
m
(t). The choice of C = I means that all the elements of
x
m
(t) are directly measurable. The plant state-equation (5.17) can be expressed
in partitioned form as
x
m
(t) = A
mm
x
m
(t) +A
mu
x
u
(t) +B
m
u(t), (5.40)
x
u
(t) = A
um
x
m
(t) +A
uu
x
u
(t) +B
u
u(t), (5.41)
where the state coecient matrices in partitioned form can be expressed as
A =
A
mm
A
mu
A
um
A
uu
, B =
B
m
B
u
. (5.42)
88
Statecoecientmatricesinpartitionedform
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
the control torques in real time. The use of feedforward control provides an
ecient solution to this problem as the whole computation is done o-line along
the nominal trajectory. Given the desired positions (
d
(t)), velocities (
d
(t)) and
accelerations (
d
(t)) in joint space, joint torques are calculated by the dynamic
inversion. The feedforward control action [121] is given as
u
ff
= M(
d
)
d
+n(
d
,
d
) +g(
d
) +K
d
, (5.38)
It can be seen from the above equation that feedforward control is nonlinear and
comes under the category of open-loop control as it does not depend on q and q.
5.4.2 Linear feedback control
In this section, the compensator design is presented, which is based on reduced-
order observer as all the states of exible manipulator are not measurable. The
plant state-vector x(t) can be partitioned as x(t) =
x
m
(t)
T
, x
u
(t)
T
T
, where
x
m
(t) is the vector of measured state variables and x
u
(t) is the vector of unmea-
sured state variables. The vector of measured outputs i.e. y(t) can directly be
chosen as equal to x
m
(t) or any linear combination of all the state variables of
x
m
(t). The output equation is given as
y(t) = Cx
m
(t), (5.39)
whete C is a constant, square matrix, indicating the same number of outputs
as the dimension of x
m
(t). The choice of C = I means that all the elements of
x
m
(t) are directly measurable. The plant state-equation (5.17) can be expressed
in partitioned form as
x
m
(t) = A
mm
x
m
(t) +A
mu
x
u
(t) +B
m
u(t), (5.40)
x
u
(t) = A
um
x
m
(t) +A
uu
x
u
(t) +B
u
u(t), (5.41)
where the state coecient matrices in partitioned form can be expressed as
A =
A
mm
A
mu
A
um
A
uu
, B =
B
m
B
u
. (5.42)
88
Linear Feedback Control
Plantstate-vector
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
the control torques in real time. The use of feedforward control provides an
ecient solution to this problem as the whole computation is done o-line along
the nominal trajectory. Given the desired positions (
d
(t)), velocities (
d
(t)) and
accelerations (
d
(t)) in joint space, joint torques are calculated by the dynamic
inversion. The feedforward control action [121] is given as
u
ff
= M(
d
)
d
+n(
d
,
d
) +g(
d
) +K
d
, (5.38)
It can be seen from the above equation that feedforward control is nonlinear and
comes under the category of open-loop control as it does not depend on q and q.
5.4.2 Linear feedback control
In this section, the compensator design is presented, which is based on reduced-
order observer as all the states of exible manipulator are not measurable. The
plant state-vector x(t) can be partitioned as x(t) =
x
m
(t)
T
, x
u
(t)
T
T
, where
x
m
(t) is the vector of measured state variables and x
u
(t) is the vector of unmea-
sured state variables. The vector of measured outputs i.e. y(t) can directly be
chosen as equal to x
m
(t) or any linear combination of all the state variables of
x
m
(t). The output equation is given as
y(t) = Cx
m
(t), (5.39)
whete C is a constant, square matrix, indicating the same number of outputs
as the dimension of x
m
(t). The choice of C = I means that all the elements of
x
m
(t) are directly measurable. The plant state-equation (5.17) can be expressed
in partitioned form as
x
m
(t) = A
mm
x
m
(t) +A
mu
x
u
(t) +B
m
u(t), (5.40)
x
u
(t) = A
um
x
m
(t) +A
uu
x
u
(t) +B
u
u(t), (5.41)
where the state coecient matrices in partitioned form can be expressed as
A =
A
mm
A
mu
A
um
A
uu
, B =
B
m
B
u
. (5.42)
88
measured/unmeasuredvariables.
Estimatedstate-vector
5.4. CONTROLLER DESIGN
With the order of the plant be n and the number of measures state variables be
k, a reduced-order observer of dimension (n k) is required to estimate all the
elements of x
u
(t). The estimated state vector x
o
(t) can be written as
x
o
(t) =
x
m
(t)
x
ou
C
1
y(t)
x
ou
, (5.43)
where x
ou
(t) is the estimation of the unmeasurable state-vector x
u
(t). To design
a reduced-order observer, C should be invertible, which means that the plant is
observable with the given choice of the output vector y(t), as given in (5.39).
Reduced-Order Observer Design
The objective of the observer is to achieve zero estimation error in the steady
state. The estimation error e
ou
(t) can be expressed as
e
ou
(t) = x
u
(t) x
ou
(t). (5.44)
The reduced-order observer dynamics (refer [122]) is given by
x
ou
(t) = Ly(t) +z(t), (5.45)
where L is the observer gain matrix and z(t) is the solution of the following state
equation
z(t) = Fz(t) +Hu(t) +Gy(t). (5.46)
Dierentiating (5.45) w.r.t time gives
x
ou
(t) = L y(t) + z(t). (5.47)
Inserting y(t) = C x
m
(t) and z(t) from (5.46), the above equation can be writ-
ten as
x
ou
(t) = LC x
m
(t) +Fz(t) +Hu(t) +Gy(t). (5.48)
89
estimation of the unmeasurable vector x
2
(t). The objective of the observer is to achieve zero
estimation error in the steady state. The reduced-order observer dynamics [32] is given by
x
o2
(t) = Ly(t) +z(t), (3.4)
where L is the observer gain matrix and z(t) is the solution of the following state equation
z(t) = Fz(t) +Hu(t) +Gy(t),
with
F = A
22
LCA
12
,
H = B
2
LCB
1
,
G = FL + (A
22
LCA
11
)C
1
.
(3.5)
The control law based on the reduced-order observer for a tracking problem can be written as
u
fb
(t) = K
opt
(x
d
(t) x
o
(t))
= K
opt
x
d
(t) K
1
x
1
(t) K
2
x
o2
(t), (3.6)
where x
d
(t) = {q
T
d
, q
T
d
}
T
is the desired state-vector and K
opt
is the optimal feedback gain ma-
trix being partitioned as K
opt
= [K
1
K
2
]. The feedback gain matrix is obtained by exploiting
the optimal control theory by minimizing the following objective function
J
(t) =
x
T
()Q()x() +u
T
()R()u()
d(), (3.7)
where J
(t) denes the objective function of the optimal control problem at steady-state,
Q(t) is a square, symmetric and positive semi-denite state weighing matrix and R(t) is a
square, symmetric and positive denite control cost matrix. Finally, the error dynamics of
the reduced-order compensator [32] can be written as
e(t)
e
o2
(t)
ABK
opt
BK
2
0 F
e(t)
e
o2
(t)
A
0
x
d
(t), , (3.8)
17
observergainmatrixsolutionofthefollowing
stateequation
Estimationerror
ROODynamics
39
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
the control torques in real time. The use of feedforward control provides an
ecient solution to this problem as the whole computation is done o-line along
the nominal trajectory. Given the desired positions (
d
(t)), velocities (
d
(t)) and
accelerations (
d
(t)) in joint space, joint torques are calculated by the dynamic
inversion. The feedforward control action [121] is given as
u
ff
= M(
d
)
d
+n(
d
,
d
) +g(
d
) +K
d
, (5.38)
It can be seen from the above equation that feedforward control is nonlinear and
comes under the category of open-loop control as it does not depend on q and q.
5.4.2 Linear feedback control
In this section, the compensator design is presented, which is based on reduced-
order observer as all the states of exible manipulator are not measurable. The
plant state-vector x(t) can be partitioned as x(t) =
x
m
(t)
T
, x
u
(t)
T
T
, where
x
m
(t) is the vector of measured state variables and x
u
(t) is the vector of unmea-
sured state variables. The vector of measured outputs i.e. y(t) can directly be
chosen as equal to x
m
(t) or any linear combination of all the state variables of
x
m
(t). The output equation is given as
y(t) = Cx
m
(t), (5.39)
whete C is a constant, square matrix, indicating the same number of outputs
as the dimension of x
m
(t). The choice of C = I means that all the elements of
x
m
(t) are directly measurable. The plant state-equation (5.17) can be expressed
in partitioned form as
x
m
(t) = A
mm
x
m
(t) +A
mu
x
u
(t) +B
m
u(t), (5.40)
x
u
(t) = A
um
x
m
(t) +A
uu
x
u
(t) +B
u
u(t), (5.41)
where the state coecient matrices in partitioned form can be expressed as
A =
A
mm
A
mu
A
um
A
uu
, B =
B
m
B
u
. (5.42)
88
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
the control torques in real time. The use of feedforward control provides an
ecient solution to this problem as the whole computation is done o-line along
the nominal trajectory. Given the desired positions (
d
(t)), velocities (
d
(t)) and
accelerations (
d
(t)) in joint space, joint torques are calculated by the dynamic
inversion. The feedforward control action [121] is given as
u
ff
= M(
d
)
d
+n(
d
,
d
) +g(
d
) +K
d
, (5.38)
It can be seen from the above equation that feedforward control is nonlinear and
comes under the category of open-loop control as it does not depend on q and q.
5.4.2 Linear feedback control
In this section, the compensator design is presented, which is based on reduced-
order observer as all the states of exible manipulator are not measurable. The
plant state-vector x(t) can be partitioned as x(t) =
x
m
(t)
T
, x
u
(t)
T
T
, where
x
m
(t) is the vector of measured state variables and x
u
(t) is the vector of unmea-
sured state variables. The vector of measured outputs i.e. y(t) can directly be
chosen as equal to x
m
(t) or any linear combination of all the state variables of
x
m
(t). The output equation is given as
y(t) = Cx
m
(t), (5.39)
whete C is a constant, square matrix, indicating the same number of outputs
as the dimension of x
m
(t). The choice of C = I means that all the elements of
x
m
(t) are directly measurable. The plant state-equation (5.17) can be expressed
in partitioned form as
x
m
(t) = A
mm
x
m
(t) +A
mu
x
u
(t) +B
m
u(t), (5.40)
x
u
(t) = A
um
x
m
(t) +A
uu
x
u
(t) +B
u
u(t), (5.41)
where the state coecient matrices in partitioned form can be expressed as
A =
A
mm
A
mu
A
um
A
uu
, B =
B
m
B
u
. (5.42)
88
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
the control torques in real time. The use of feedforward control provides an
ecient solution to this problem as the whole computation is done o-line along
the nominal trajectory. Given the desired positions (
d
(t)), velocities (
d
(t)) and
accelerations (
d
(t)) in joint space, joint torques are calculated by the dynamic
inversion. The feedforward control action [121] is given as
u
ff
= M(
d
)
d
+n(
d
,
d
) +g(
d
) +K
d
, (5.38)
It can be seen from the above equation that feedforward control is nonlinear and
comes under the category of open-loop control as it does not depend on q and q.
5.4.2 Linear feedback control
In this section, the compensator design is presented, which is based on reduced-
order observer as all the states of exible manipulator are not measurable. The
plant state-vector x(t) can be partitioned as x(t) =
x
m
(t)
T
, x
u
(t)
T
T
, where
x
m
(t) is the vector of measured state variables and x
u
(t) is the vector of unmea-
sured state variables. The vector of measured outputs i.e. y(t) can directly be
chosen as equal to x
m
(t) or any linear combination of all the state variables of
x
m
(t). The output equation is given as
y(t) = Cx
m
(t), (5.39)
whete C is a constant, square matrix, indicating the same number of outputs
as the dimension of x
m
(t). The choice of C = I means that all the elements of
x
m
(t) are directly measurable. The plant state-equation (5.17) can be expressed
in partitioned form as
x
m
(t) = A
mm
x
m
(t) +A
mu
x
u
(t) +B
m
u(t), (5.40)
x
u
(t) = A
um
x
m
(t) +A
uu
x
u
(t) +B
u
u(t), (5.41)
where the state coecient matrices in partitioned form can be expressed as
A =
A
mm
A
mu
A
um
A
uu
, B =
B
m
B
u
. (5.42)
88
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
the control torques in real time. The use of feedforward control provides an
ecient solution to this problem as the whole computation is done o-line along
the nominal trajectory. Given the desired positions (
d
(t)), velocities (
d
(t)) and
accelerations (
d
(t)) in joint space, joint torques are calculated by the dynamic
inversion. The feedforward control action [121] is given as
u
ff
= M(
d
)
d
+n(
d
,
d
) +g(
d
) +K
d
, (5.38)
It can be seen from the above equation that feedforward control is nonlinear and
comes under the category of open-loop control as it does not depend on q and q.
5.4.2 Linear feedback control
In this section, the compensator design is presented, which is based on reduced-
order observer as all the states of exible manipulator are not measurable. The
plant state-vector x(t) can be partitioned as x(t) =
x
m
(t)
T
, x
u
(t)
T
T
, where
x
m
(t) is the vector of measured state variables and x
u
(t) is the vector of unmea-
sured state variables. The vector of measured outputs i.e. y(t) can directly be
chosen as equal to x
m
(t) or any linear combination of all the state variables of
x
m
(t). The output equation is given as
y(t) = Cx
m
(t), (5.39)
whete C is a constant, square matrix, indicating the same number of outputs
as the dimension of x
m
(t). The choice of C = I means that all the elements of
x
m
(t) are directly measurable. The plant state-equation (5.17) can be expressed
in partitioned form as
x
m
(t) = A
mm
x
m
(t) +A
mu
x
u
(t) +B
m
u(t), (5.40)
x
u
(t) = A
um
x
m
(t) +A
uu
x
u
(t) +B
u
u(t), (5.41)
where the state coecient matrices in partitioned form can be expressed as
A =
A
mm
A
mu
A
um
A
uu
, B =
B
m
B
u
. (5.42)
88
Reduced Order Observer Design
5.4. CONTROLLER DESIGN
With the order of the plant be n and the number of measures state variables be
k, a reduced-order observer of dimension (n k) is required to estimate all the
elements of x
u
(t). The estimated state vector x
o
(t) can be written as
x
o
(t) =
x
m
(t)
x
ou
C
1
y(t)
x
ou
, (5.43)
where x
ou
(t) is the estimation of the unmeasurable state-vector x
u
(t). To design
a reduced-order observer, C should be invertible, which means that the plant is
observable with the given choice of the output vector y(t), as given in (5.39).
Reduced-Order Observer Design
The objective of the observer is to achieve zero estimation error in the steady
state. The estimation error e
ou
(t) can be expressed as
e
ou
(t) = x
u
(t) x
ou
(t). (5.44)
The reduced-order observer dynamics (refer [122]) is given by
x
ou
(t) = Ly(t) +z(t), (5.45)
where L is the observer gain matrix and z(t) is the solution of the following state
equation
z(t) = Fz(t) +Hu(t) +Gy(t). (5.46)
Dierentiating (5.45) w.r.t time gives
x
ou
(t) = L y(t) + z(t). (5.47)
Inserting y(t) = C x
m
(t) and z(t) from (5.46), the above equation can be writ-
ten as
x
ou
(t) = LC x
m
(t) +Fz(t) +Hu(t) +Gy(t). (5.48)
89
5.4. CONTROLLER DESIGN
With the order of the plant be n and the number of measures state variables be
k, a reduced-order observer of dimension (n k) is required to estimate all the
elements of x
u
(t). The estimated state vector x
o
(t) can be written as
x
o
(t) =
x
m
(t)
x
ou
C
1
y(t)
x
ou
, (5.43)
where x
ou
(t) is the estimation of the unmeasurable state-vector x
u
(t). To design
a reduced-order observer, C should be invertible, which means that the plant is
observable with the given choice of the output vector y(t), as given in (5.39).
Reduced-Order Observer Design
The objective of the observer is to achieve zero estimation error in the steady
state. The estimation error e
ou
(t) can be expressed as
e
ou
(t) = x
u
(t) x
ou
(t). (5.44)
The reduced-order observer dynamics (refer [122]) is given by
x
ou
(t) = Ly(t) +z(t), (5.45)
where L is the observer gain matrix and z(t) is the solution of the following state
equation
z(t) = Fz(t) +Hu(t) +Gy(t). (5.46)
Dierentiating (5.45) w.r.t time gives
x
ou
(t) = L y(t) + z(t). (5.47)
Inserting y(t) = C x
m
(t) and z(t) from (5.46), the above equation can be writ-
ten as
x
ou
(t) = LC x
m
(t) +Fz(t) +Hu(t) +Gy(t). (5.48)
89
Stateequationforestimationerror
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
Inserting the values of y(t), x
m
(t) and z(t) using (5.39), (5.40) and (5.46) respec-
tively, the above equation can be written as
x
ou
(t) = LC[A
mm
x
m
(t) +A
mu
x
u
(t) +B
m
u(t)] +
+ F[x
u
(t) e
ou
(t) LCx
m
(t)] +Hu(t) +GCx
m
(t). (5.49)
After collecting the appropriate terms, (5.49) can be rewritten as
x
ou
(t) = (LCA
mm
FLC+GC)x
m
(t) + (LCA
mu
+F)x
u
(t) +
+ (LCB
m
+H)u(t) Fe
ou
(t). (5.50)
Subtracting (5.50 ) from (5.41), the state equation for estimation error can be
given as
e
ou
(t) = x
u
(t) x
ou
(t)
= Fe
ou
(t) + (A
um
LCA
mm
+FLCGC)x
m
(t) +
+ (A
uu
LCA
mu
F)x
u
(t) + (B
u
LCB
m
H)u(t). (5.51)
To achieve zero estimation error at the steady state, all the coecient matrices
of x
m
(t), x
u
(t) and u(t) must vanish and all the eigenvalues of F must lie in the
left-half plane. This leads to
F = A
uu
LCA
mu
, (5.52)
H = B
u
LCB
m
, (5.53)
G = FL + (A
uu
LCA
mm
)C
1
. (5.54)
The reduced-order observer design is based on the selection of observer gain ma-
trix L, such that all the eigenvalues of F must lie in the left-half plane.
90
Toachievezeroestimationerroratsteadystate,allthecoecientmatricesofx
m
(t),
x
u
(t)andu(t)mustvanishandalltheeigen-valuesofFmustliesinLHP.
ControlLawbasedonROOforatrackingproblem
40
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
Inserting the values of y(t), x
m
(t) and z(t) using (5.39), (5.40) and (5.46) respec-
tively, the above equation can be written as
x
ou
(t) = LC[A
mm
x
m
(t) +A
mu
x
u
(t) +B
m
u(t)] +
+ F[x
u
(t) e
ou
(t) LCx
m
(t)] +Hu(t) +GCx
m
(t). (5.49)
After collecting the appropriate terms, (5.49) can be rewritten as
x
ou
(t) = (LCA
mm
FLC+GC)x
m
(t) + (LCA
mu
+F)x
u
(t) +
+ (LCB
m
+H)u(t) Fe
ou
(t). (5.50)
Subtracting (5.50 ) from (5.41), the state equation for estimation error can be
given as
e
ou
(t) = x
u
(t) x
ou
(t)
= Fe
ou
(t) + (A
um
LCA
mm
+FLCGC)x
m
(t) +
+ (A
uu
LCA
mu
F)x
u
(t) + (B
u
LCB
m
H)u(t). (5.51)
To achieve zero estimation error at the steady state, all the coecient matrices
of x
m
(t), x
u
(t) and u(t) must vanish and all the eigenvalues of F must lie in the
left-half plane. This leads to
F = A
uu
LCA
mu
, (5.52)
H = B
u
LCB
m
, (5.53)
G = FL + (A
uu
LCA
mm
)C
1
. (5.54)
The reduced-order observer design is based on the selection of observer gain ma-
trix L, such that all the eigenvalues of F must lie in the left-half plane.
90
5.4. CONTROLLER DESIGN
Optimal Feedback Control
The feedback control law based on the reduced-order observer for a tracking
problem can be written as
u
fb
(t) = K
opt
(x
d
(t) x
o
(t))
= K
opt
x
d
(t) K
m
x
m
(t) K
u
x
ou
(t), (5.55)
where x
d
(t) = {q
T
d
, q
T
d
}
T
is the desired state-vector and K
opt
is the optimal
feedback gain matrix being partitioned as K
opt
= [K
m
K
u
].
The feedback gain matrix is obtained by exploiting the optimal control theory,
which produces the best possible control system to achieve the desired perfor-
mance objectives. The best possible control system means the one which meets
the desired performance with minimum control energy. Optimal control also takes
into account the transient energy, which represents the total energy of the system
as it is undergoing transient response. The performance parameters of any con-
trol system i.e. maximum overshoot and settling time are directly related to the
transient energy. More transient energy means more overshoot whereas the time
taken by the transient energy to decay to zero indicates the settling time. Thus,
the aim of the optimal control problem is to minimize the control energy and
transient energy of the system by formulating the following objective function
J
(t) =
x
T
()Q()x() +u
T
()R()u()
d(), (5.56)
which is subjected to the following constraint
x(t) = A(t)x(t) +B(t)u(t). (5.57)
The above formulation is called as a constrained optimization problem in which
J
(t) denes the objective function of the optimal control problem at steady-
state. The scalar function u
T
(t)R(t)u(t) represents control energy, where R(t) is
a square, symmetric and positive denite control cost matrix. Similarly, the term
91
5.4. CONTROLLER DESIGN
Optimal Feedback Control
The feedback control law based on the reduced-order observer for a tracking
problem can be written as
u
fb
(t) = K
opt
(x
d
(t) x
o
(t))
= K
opt
x
d
(t) K
m
x
m
(t) K
u
x
ou
(t), (5.55)
where x
d
(t) = {q
T
d
, q
T
d
}
T
is the desired state-vector and K
opt
is the optimal
feedback gain matrix being partitioned as K
opt
= [K
m
K
u
].
The feedback gain matrix is obtained by exploiting the optimal control theory,
which produces the best possible control system to achieve the desired perfor-
mance objectives. The best possible control system means the one which meets
the desired performance with minimum control energy. Optimal control also takes
into account the transient energy, which represents the total energy of the system
as it is undergoing transient response. The performance parameters of any con-
trol system i.e. maximum overshoot and settling time are directly related to the
transient energy. More transient energy means more overshoot whereas the time
taken by the transient energy to decay to zero indicates the settling time. Thus,
the aim of the optimal control problem is to minimize the control energy and
transient energy of the system by formulating the following objective function
J
(t) =
x
T
()Q()x() +u
T
()R()u()
d(), (5.56)
which is subjected to the following constraint
x(t) = A(t)x(t) +B(t)u(t). (5.57)
The above formulation is called as a constrained optimization problem in which
J
(t) denes the objective function of the optimal control problem at steady-
state. The scalar function u
T
(t)R(t)u(t) represents control energy, where R(t) is
a square, symmetric and positive denite control cost matrix. Similarly, the term
91
where=desiredstatevector
5.4. CONTROLLER DESIGN
Optimal Feedback Control
The feedback control law based on the reduced-order observer for a tracking
problem can be written as
u
fb
(t) = K
opt
(x
d
(t) x
o
(t))
= K
opt
x
d
(t) K
m
x
m
(t) K
u
x
ou
(t), (5.55)
where x
d
(t) = {q
T
d
, q
T
d
}
T
is the desired state-vector and K
opt
is the optimal
feedback gain matrix being partitioned as K
opt
= [K
m
K
u
].
The feedback gain matrix is obtained by exploiting the optimal control theory,
which produces the best possible control system to achieve the desired perfor-
mance objectives. The best possible control system means the one which meets
the desired performance with minimum control energy. Optimal control also takes
into account the transient energy, which represents the total energy of the system
as it is undergoing transient response. The performance parameters of any con-
trol system i.e. maximum overshoot and settling time are directly related to the
transient energy. More transient energy means more overshoot whereas the time
taken by the transient energy to decay to zero indicates the settling time. Thus,
the aim of the optimal control problem is to minimize the control energy and
transient energy of the system by formulating the following objective function
J
(t) =
x
T
()Q()x() +u
T
()R()u()
d(), (5.56)
which is subjected to the following constraint
x(t) = A(t)x(t) +B(t)u(t). (5.57)
The above formulation is called as a constrained optimization problem in which
J
(t) denes the objective function of the optimal control problem at steady-
state. The scalar function u
T
(t)R(t)u(t) represents control energy, where R(t) is
a square, symmetric and positive denite control cost matrix. Similarly, the term
91
=optimalfeedbackgainmatrix
OptimalfeedbackgainmatrixK
opt
isobtainedby
estimation of the unmeasurable vector x
2
(t). The objective of the observer is to achieve zero
estimation error in the steady state. The reduced-order observer dynamics [32] is given by
x
o2
(t) = Ly(t) +z(t), (3.4)
where L is the observer gain matrix and z(t) is the solution of the following state equation
z(t) = Fz(t) +Hu(t) +Gy(t),
with
F = A
22
LCA
12
,
H = B
2
LCB
1
,
G = FL + (A
22
LCA
11
)C
1
.
(3.5)
The control law based on the reduced-order observer for a tracking problem can be written as
u
fb
(t) = K
opt
(x
d
(t) x
o
(t))
= K
opt
x
d
(t) K
1
x
1
(t) K
2
x
o2
(t), (3.6)
where x
d
(t) = {q
T
d
, q
T
d
}
T
is the desired state-vector and K
opt
is the optimal feedback gain ma-
trix being partitioned as K
opt
= [K
1
K
2
]. The feedback gain matrix is obtained by exploiting
the optimal control theory by minimizing the following objective function
J
(t) =
x
T
()Q()x() +u
T
()R()u()
d(), (3.7)
where J
(t) denes the objective function of the optimal control problem at steady-state,
Q(t) is a square, symmetric and positive semi-denite state weighing matrix and R(t) is a
square, symmetric and positive denite control cost matrix. Finally, the error dynamics of
the reduced-order compensator [32] can be written as
e(t)
e
o2
(t)
ABK
opt
BK
2
0 F
e(t)
e
o2
(t)
A
0
x
d
(t), , (3.8)
17
ErrorDynamics
41
min
5.4. CONTROLLER DESIGN
Optimal Feedback Control
The feedback control law based on the reduced-order observer for a tracking
problem can be written as
u
fb
(t) = K
opt
(x
d
(t) x
o
(t))
= K
opt
x
d
(t) K
m
x
m
(t) K
u
x
ou
(t), (5.55)
where x
d
(t) = {q
T
d
, q
T
d
}
T
is the desired state-vector and K
opt
is the optimal
feedback gain matrix being partitioned as K
opt
= [K
m
K
u
].
The feedback gain matrix is obtained by exploiting the optimal control theory,
which produces the best possible control system to achieve the desired perfor-
mance objectives. The best possible control system means the one which meets
the desired performance with minimum control energy. Optimal control also takes
into account the transient energy, which represents the total energy of the system
as it is undergoing transient response. The performance parameters of any con-
trol system i.e. maximum overshoot and settling time are directly related to the
transient energy. More transient energy means more overshoot whereas the time
taken by the transient energy to decay to zero indicates the settling time. Thus,
the aim of the optimal control problem is to minimize the control energy and
transient energy of the system by formulating the following objective function
J
(t) =
x
T
()Q()x() +u
T
()R()u()
d(), (5.56)
which is subjected to the following constraint
x(t) = A(t)x(t) +B(t)u(t). (5.57)
The above formulation is called as a constrained optimization problem in which
J
(t) denes the objective function of the optimal control problem at steady-
state. The scalar function u
T
(t)R(t)u(t) represents control energy, where R(t) is
a square, symmetric and positive denite control cost matrix. Similarly, the term
91
subjectto
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
x
T
(t)Q(t)x(t) represents transient energy, where Q(t) is a square, symmetric and
positive semi-denite state weighing matrix. The outcome of the optimal control
problem is the feedback gain matrix K
opt
such that the scalar function J
(t) is
minimized. This minimization is performed in such a way that the state-vector
x(t) is the solution to state-equation of the plant, as given in (5.57).
Finally, the error dynamics of the reduced-order compensator [122] can be
written as
e(t)
e
ou
(t)
ABK
opt
BK
u
0 F
e(t)
e
ou
(t)
A
0
x
d
(t), (5.58)
where e(t) = x
d
(t) x(t) is the tracking error and e
ou
(t) = x
u
(t) x
ou
(t) is the
estimation error. The above state space form of the complete dynamic system
can be solved using Runge-Kutta 4(5) method with adaptive step size.
5.5 Summary
This chapter presents the complete design of a closed-loop tracking system (LQR-
ROO-CS), which is required to achieve large movement tracking control of exible
manipulators along with vibration suppression. The controller has been devel-
oped using three control strategies in conjunction, namely nonlinear feedforward
control, linear feedback control and command shaping. The nonlinear feedforward
control has been obtained by dynamic inversion, which provides the nominal tra-
jectory. The linear feedback has been designed using linear-quadratic regulator,
which ensures stability as well as the desired performance of the exible systems.
All the non-measurable state variables has been estimated by using a reduced or-
der observer (ROO). Finally, the command shaping (CS) has been incorporated
in the controller to obtain the desired non-oscillatory response. The ecacy of
the controller is shown in the next chapter with the help of three case studies.
92
-SolveusingRunge-Kuttamethod
where=trackingerror
=estimationerror.
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
x
T
(t)Q(t)x(t) represents transient energy, where Q(t) is a square, symmetric and
positive semi-denite state weighing matrix. The outcome of the optimal control
problem is the feedback gain matrix K
opt
such that the scalar function J
(t) is
minimized. This minimization is performed in such a way that the state-vector
x(t) is the solution to state-equation of the plant, as given in (5.57).
Finally, the error dynamics of the reduced-order compensator [122] can be
written as
e(t)
e
ou
(t)
ABK
opt
BK
u
0 F
e(t)
e
ou
(t)
A
0
x
d
(t), (5.58)
where e(t) = x
d
(t) x(t) is the tracking error and e
ou
(t) = x
u
(t) x
ou
(t) is the
estimation error. The above state space form of the complete dynamic system
can be solved using Runge-Kutta 4(5) method with adaptive step size.
5.5 Summary
This chapter presents the complete design of a closed-loop tracking system (LQR-
ROO-CS), which is required to achieve large movement tracking control of exible
manipulators along with vibration suppression. The controller has been devel-
oped using three control strategies in conjunction, namely nonlinear feedforward
control, linear feedback control and command shaping. The nonlinear feedforward
control has been obtained by dynamic inversion, which provides the nominal tra-
jectory. The linear feedback has been designed using linear-quadratic regulator,
which ensures stability as well as the desired performance of the exible systems.
All the non-measurable state variables has been estimated by using a reduced or-
der observer (ROO). Finally, the command shaping (CS) has been incorporated
in the controller to obtain the desired non-oscillatory response. The ecacy of
the controller is shown in the next chapter with the help of three case studies.
92
CHAPTER 5. CONTROL OF FLEXIBLE MANIPULATORS
x
T
(t)Q(t)x(t) represents transient energy, where Q(t) is a square, symmetric and
positive semi-denite state weighing matrix. The outcome of the optimal control
problem is the feedback gain matrix K
opt
such that the scalar function J
(t) is
minimized. This minimization is performed in such a way that the state-vector
x(t) is the solution to state-equation of the plant, as given in (5.57).
Finally, the error dynamics of the reduced-order compensator [122] can be
written as
e(t)
e
ou
(t)
ABK
opt
BK
u
0 F
e(t)
e
ou
(t)
A
0
x
d
(t), (5.58)
where e(t) = x
d
(t) x(t) is the tracking error and e
ou
(t) = x
u
(t) x
ou
(t) is the
estimation error. The above state space form of the complete dynamic system
can be solved using Runge-Kutta 4(5) method with adaptive step size.
5.5 Summary
This chapter presents the complete design of a closed-loop tracking system (LQR-
ROO-CS), which is required to achieve large movement tracking control of exible
manipulators along with vibration suppression. The controller has been devel-
oped using three control strategies in conjunction, namely nonlinear feedforward
control, linear feedback control and command shaping. The nonlinear feedforward
control has been obtained by dynamic inversion, which provides the nominal tra-
jectory. The linear feedback has been designed using linear-quadratic regulator,
which ensures stability as well as the desired performance of the exible systems.
All the non-measurable state variables has been estimated by using a reduced or-
der observer (ROO). Finally, the command shaping (CS) has been incorporated
in the controller to obtain the desired non-oscillatory response. The ecacy of
the controller is shown in the next chapter with the help of three case studies.
92
CompleteTrackingSystemwithROOandShaper
42
Shaper
Robotic
Manipulator
+ n( , ) + KKKK
+
+
K
opt
K
m
C
-1
K
u
L
G
F
H
Compensator
Inverse Dynamics
x
d
-
-
x
d
Inverse
Kinematics
Trajectory
Generator
in
Cartesian
Space
Shaper
K
opt
K
m
C
-1
K
u
L
G
F
H
Compensator
-
-
x
ds
x
d
y
d
u
fb
u
ff
u
x
ou
z
+
+
+
+
x
m
+
+
+
+
RESULTSANDDISCUSSIONS
CASESTUDY1:Cartwithaexiblepole
CASESTUDY2:Twolinkexiblemanipulatorfollowingasquaretrajectory
inCartesianspace
43
CASESTUDY1:Cartwithaexiblepole
Control objecTve is to move the cart
by one meter, while not lecng the
pendulumtofalli.e.x
d
={100000}
T
OL
=[0,0,5.89i,639i].
Double pole at origin - unstable plant -
cannotbecontrolledusingu
only.
u
l
is essenTal and calculated using
opTmalcontroltheory
The only input u(t) is the horizontal
force applied to the cart and three
outputsarex,
1
and
2
.
Reduced-order observer is designed
by taking the carts posiTon as the
onlyoutputvariable. Fig. Moving cart with a flexible pole
44
MassofthecartinKgs M 1
Massoftherst
(second)linkinKgs
m1(m2) 0.05
Lengthoftherst
(second)linkinmeters
l1(l2) 1
SpringsTnessatrst
jointinNm/rad
k1 5
SpringsTnessat
secondjointinNm/rad
k2 500
StateweighTng
matrix
Q diag([500050002000])
Controlcost
matrix
R [50]
Vectorofdesired
ROOpoles
v [-20-2260i-6069i]
T
OpTmalgain
matrix
K
opt
[10-1.29-0.434.800.02
-0.01]
Impulse
FirstMode SecondMode ThirdMode
Mag. Time Mag. Time Mag. Time
1 0.9183 0.0000 0.2792 0.0000 0.250 0.0000
2 0.0799 1.4694 0.4984 0.5350 0.500 0.0049
3 0.0017 2.9387 0.2224 1.0701 0.250 0.0098
System Parameters Controller Parameters
W
n
=[3.025.87638.92]
T
(Hz),=[0.7060.03621e-5]
T
Shaper Parameters
Parameters
45
Plot1(a):OneModeShapingDesiredPosition
0 0.5 1 1.5 2 2.5 3 3.5 4
0
0.2
0.4
0.6
0.8
1
Time (s)
x
d
(
t
)
(
m
e
t
e
r
s
)
Desired Position
One Mode Shaping
Two Mode Shaping
Three Mode Shaping
46
0 1 2 3 4
!0.5
0
0.5
1
1.5
x
(
t
)
(
m
e
t
e
r
s
)
Unshaped FSFC Response
Shaped ROO Response
0 1 2 3 4
!10
0
10
20
!
1
(
t
)
(
d
e
g
r
e
e
s
)
0 1 2 3 4
!0.05
0
0.05
!
2
(
t
)
(
d
e
g
r
e
e
s
)
Time (s)
0 1 2 3 4
!5
0
5
10
u
(
t
)
(
N
)
Time (s)
Plot 1(b) : One Mode Shaping Position Response
47
0 1 2 3 4
!0.5
0
0.5
1
1.5
x
(
t
)
(
m
/
s
)
Unshaped FSFC Response
Shaped ROO Response
0 1 2 3 4
!2
!1
0
1
2
1
(
t
)
(
r
a
d
/
s
)
0 0.05 0.1 0.15 0.2
!0.1
!0.05
0
0.05
0.1
2
(
t
)
(
r
a
d
/
s
)
Time (s)
0 1 2 3 4
!5
0
5
10
u
(
t
)
(
N
)
Time (s)
Uff
Ufb
U
Plot 1(c) : One Mode Shaping Velocity Response
48
Plot 1(d) : One Mode Shaping Estimation Error
0 0.5 1
!0.5
0
0.5
e
0
1
(
r
a
d
)
0 0.5 1
!0.1
!0.05
0
0.05
0.1
e
0
2
(
r
a
d
)
0 0.5 1
!1
!0.5
0
0.5
1
e
0
3
(
r
a
d
/
s
e
c
)
0 0.5 1
!100
!50
0
50
e
0
4
(
r
a
d
/
s
e
c
)
Time (s)
0 0.5 1
!200
!100
0
100
200
e
0
5
(
r
a
d
/
s
e
c
)
Time (s)
49
0 1 2 3 4
!0.5
0
0.5
1
1.5
x
(
t
)
(
m
e
t
e
r
s
)
Unshaped FSFC Response
Shaped ROO Response
0 1 2 3 4
!10
0
10
20
!
1
(
t
)
(
d
e
g
r
e
e
s
)
0 1 2 3 4
!0.05
0
0.05
!
2
(
t
)
(
d
e
g
r
e
e
s
)
Time (s)
0 1 2 3 4
!5
0
5
10
u
(
t
)
(
N
)
Time (s)
Plot 2(a) : Two Mode Shaping Position Response
50
0 1 2 3 4
!0.5
0
0.5
1
1.5
x
(
t
)
(
m
/
s
)
Unshaped FSFC Response
Shaped ROO Response
0 1 2 3 4
!2
!1
0
1
2
1
(
t
)
(
r
a
d
/
s
)
0 0.05 0.1 0.15 0.2
!0.1
!0.05
0
0.05
0.1
2
(
t
)
(
r
a
d
/
s
)
Time (s)
0 1 2 3 4
!2
0
2
4
6
u
(
t
)
(
N
)
Time (s)
Uff
Ufb
U
Plot 2(b) : Two Mode Shaping Velocity Response
51
0 1 2 3 4
!0.5
0
0.5
1
1.5
x
(
t
)
(
m
e
t
e
r
s
)
Unshaped FSFC Response
Shaped ROO Response
0 1 2 3 4
!10
0
10
20
!
1
(
t
)
(
d
e
g
r
e
e
s
)
0 1 2 3 4
!0.05
0
0.05
!
2
(
t
)
(
d
e
g
r
e
e
s
)
Time (s)
0 1 2 3 4
!5
0
5
10
u
(
t
)
(
N
)
Time (s)
Plot 3(a) : Three Mode Shaping Position Response
52
0 1 2 3 4
!0.5
0
0.5
1
1.5
x
(
t
)
(
m
/
s
)
Unshaped FSFC Response
Shaped ROO Response
0 1 2 3 4
!2
!1
0
1
2
1
(
t
)
(
r
a
d
/
s
)
0 0.05 0.1 0.15 0.2
!0.1
!0.05
0
0.05
0.1
2
(
t
)
(
r
a
d
/
s
)
Time (s)
0 1 2 3 4
!2
0
2
4
6
u
(
t
)
(
N
)
Time (s)
Uff
Ufb
U
Plot 3(b) : Three Mode Shaping Velocity Response
53
ANIMATION
Unshaped Response 2-Mode Shaped Response
54
Table:LevelofVibration/ForceReduction
Variable Unshaped
Response
One Mode Shaping Two Mode Shaping Three Mode Shaping
Value % Reduction Value % Reduction Value % Reduction
|x(t)
max
| 1.0614 1.0112 4.73 % 1.0000 5.78 % 1.0000 5.78 %
|
1
(t)
max
|
13.0915 12.030 8.11 % 2.488 80.99 % 2. 488 81.00 %
|
2
(t)
max
|
0.0429 0.0393 8.32 % 0.0086 80.01 % 0.0078 81.83 %
|dx(t)
max
| 1.3069 1.2002 8.17 % 0.7903 39.53 % 0.7901 39.54 %
|d
1
(t)
max
| 1.1555 1.0613 8.16 % 0.2349 79.67 % 0.2272 80.33 %
|d
2
(t)
max
| 0.0616 0.0585 10.05 % 0.0148 75.97 % 0.0089 86.36 %
|u(t)
max
|
10.00 8.9206
10.79 % 4.3165 56.83 % 4.1920 58.08 %
55
RobotParameters:
- Linklength=4.5m
- Flexuralrigidity=1676Nm
2
- Massdensity=0.335Kg/m
EachlinkisdiscreTzedin3elements.
CASESTUDY2:TwoLinkFlexibleManipulator
Two-link manipulator tracking square
trajectoryinCartesianspace.
Sharp turns in the trajectory to
inducevibraTons.
Control objecTve: accurate tracking
withminimumvibraTons
56
Wn=5.96Hz Wn=22.46Hz Wn=49.92Hz
Wn=8.570Hz Wn=27.77Hz Wn=57.94Hz
FlexibleModesofTwo-LinkFlexibleManipulator
Validation of the flexible modes
Clamped-Freecase
ConguraTon:
1
=0,
2
=90
58
6.4. CASE STUDY 3: TWO-LINK FLEXIBLE MANIPULATOR TRACKING
TRAJECTORY IN CARTESIAN SPACE
Table 6.11: Comparison of elastic frequencies of the two-link exible manipulator.
Mode ABACUS Result FEM Code LPM Code
(Hz) (Hz) (Hz)
1 5.96 5.96 5.95
2 8.57 8.61 8.54
3 22.46 22.50 22.39
4 27.77 27.89 27.59
5 49.92 50.30 48.89
6 57.94 58.54 55.80
model is accurate and can be used for further analysis with condence. Slight
variations can be observed in the last two modes, which is due to the fact that
only ve elements per link are considered in the mathematical model. More ac-
curate results can be obtained if large number of elements are considered in the
discretization process.
6.4.2 Conguration dependence of elastic frequencies
This sub-section presents the frequency analysis of the nonlinear exible manip-
ulator, which is helpful in evaluating the dynamic characteristics of the system.
Frequencies are usually evaluated for a linear system, thus linearized model of the
exible manipulator is used to perform the analysis. As the manipulator sweeps
dierent congurations during tracking, dynamic forces acting on the nonlinear
system change, which in turn leads to change in the parameters (resonant fre-
quencies) of the system. These changes can aect the performance of the input
shaper as well as feedback channel of the controller as the former is applicable
for linear models and the latter is based on the linear control theory.
Table 6.12: Variation in resonant frequencies (Hz) of rst six elastic-modes of the
two-link exible manipulator with
2
= 90
o
(xed) and
1
= variable.
Mode
1
= 0
o
1
= 15
o
1
= 45
o
1
= 90
o
1
= 135
o
1 5.96 5.99 6.04 6.07 6.04
2 8.61 8.60 8.60 8.57 8.55
3 22.50 22.53 22.59 22.63 22.59
4 27.89 27.89 27.87 27.84 27.81
5 50.30 50.34 50.40 50.45 50.40
6 58.54 58.53 58.52 58.49 58.45
125
Configuration Dependence of Natural Frequencies
Variation in natural frequency of the flexural modes
Case1:
2
= xed(90),
1
= variable
59
6.4. CASE STUDY 3: TWO-LINK FLEXIBLE MANIPULATOR TRACKING
TRAJECTORY IN CARTESIAN SPACE
Table 6.11: Comparison of elastic frequencies of the two-link exible manipulator.
Mode ABACUS Result FEM Code LPM Code
(Hz) (Hz) (Hz)
1 5.96 5.96 5.95
2 8.57 8.61 8.54
3 22.46 22.50 22.39
4 27.77 27.89 27.59
5 49.92 50.30 48.89
6 57.94 58.54 55.80
model is accurate and can be used for further analysis with condence. Slight
variations can be observed in the last two modes, which is due to the fact that
only ve elements per link are considered in the mathematical model. More ac-
curate results can be obtained if large number of elements are considered in the
discretization process.
6.4.2 Conguration dependence of elastic frequencies
This sub-section presents the frequency analysis of the nonlinear exible manip-
ulator, which is helpful in evaluating the dynamic characteristics of the system.
Frequencies are usually evaluated for a linear system, thus linearized model of the
exible manipulator is used to perform the analysis. As the manipulator sweeps
dierent congurations during tracking, dynamic forces acting on the nonlinear
system change, which in turn leads to change in the parameters (resonant fre-
quencies) of the system. These changes can aect the performance of the input
shaper as well as feedback channel of the controller as the former is applicable
for linear models and the latter is based on the linear control theory.
Table 6.12: Variation in resonant frequencies (Hz) of rst six elastic-modes of the
two-link exible manipulator with
2
= 90
o
(xed) and
1
= variable.
Mode
1
= 0
o
1
= 15
o
1
= 45
o
1
= 90
o
1
= 135
o
1 5.96 5.99 6.04 6.07 6.04
2 8.61 8.60 8.60 8.57 8.55
3 22.50 22.53 22.59 22.63 22.59
4 27.89 27.89 27.87 27.84 27.81
5 50.30 50.34 50.40 50.45 50.40
6 58.54 58.53 58.52 58.49 58.45
125
CHAPTER 6. RESULTS AND DISCUSSIONS
Table 6.13: Variation in resonant frequencies (Hz) of rst six elastic-modes of the
two-link exible manipulator with
1
= 0
o
(xed) and
2
= variable.
Mode
2
= 0
o
2
= 15
o
2
= 45
o
2
= 90
o
2
= 135
o
1 6.40 6.35 6.12 5.96 6.12
2 10.76 10.54 9.08 8.61 9.08
3 23.86 23.62 22.81 22.50 22.81
4 32.13 30.77 28.38 27.89 28.38
5 52.60 52.03 50.68 50.30 50.68
6 64.68 62.18 59.05 58.54 59.05
Table 6.14: Percentage change in resonant frequencies (Hz) of rst six elastic-modes
of the two-link exible manipulator with
1
= 0
o
(xed) and
2
= variable.
Mode
2
= 0
o
15
o
% Ch. 45
o
% Ch. 90
o
% Ch. 135
o
% Ch.
1 6.40 6.35 0.78 6.12 4.37 5.96 6.87 6.12 4.37
2 10.76 10.54 2.04 9.08 15.61 8.61 19.98 9.08 15.61
3 23.86 23.62 1.01 22.81 4.40 22.50 5.70 22.81 4.40
4 32.13 30.77 4.23 28.38 11.67 27.89 13.20 28.38 11.67
5 52.60 52.03 1.08 50.68 3.65 50.30 4.37 50.68 3.65
6 64.68 62.18 3.86 59.05 8.70 58.54 9.49 59.05 8.70
To study the conguration dependence of the elastic frequencies, rst of all,
those conguration are studied in which the rst joint angle (
1
) is changing and
the second joint angle (
2
) remains xed. Five signicant congurations in this
category are considered and the corresponding frequencies are calculated using
linearized FEM model, as reported in Table 6.12. It can be clearly seen from the
values that there is hardly any change in the resonant frequencies of the two-link
exible manipulator. This is due to the fact that at all the congurations, there
is no change in the second joint angle. So, the inertial forces remains constant
and the manipulator behaves like a structure made up of a single link only, whose
length is equal to the combined lengths of both the original links.
In the next study, those congurations are studied in which the second joint
angle (
2
) is changing and the rst joint angle (
1
) remains xed. Again, the
frequencies at ve dierent congurations are calculated, as given in Table 6.13.
In this case, it is observed that there is a signicant variation in the resonant
frequencies, due to change in the inertial forces. Percentage change in the reso-
nant frequencies are reported in Table 6.14 w.r.t. to the base conguration, i.e.
(
1
) = 0
o
and (
2
) = 0
o
. Maximum percentage change is found to be of the order
126
Case2:
1
= xed(0),
2
= variable
Error (%) in Natural Frequency
Case2:
1
= xed(0),
2
= variable
ToaccommodatethesevariaTons,morerobustshaper(ZVD)isused.
60
CHAPTER 6. RESULTS AND DISCUSSIONS
Table 6.13: Variation in resonant frequencies (Hz) of rst six elastic-modes of the
two-link exible manipulator with
1
= 0
o
(xed) and
2
= variable.
Mode
2
= 0
o
2
= 15
o
2
= 45
o
2
= 90
o
2
= 135
o
1 6.40 6.35 6.12 5.96 6.12
2 10.76 10.54 9.08 8.61 9.08
3 23.86 23.62 22.81 22.50 22.81
4 32.13 30.77 28.38 27.89 28.38
5 52.60 52.03 50.68 50.30 50.68
6 64.68 62.18 59.05 58.54 59.05
Table 6.14: Percentage change in resonant frequencies (Hz) of rst six elastic-modes
of the two-link exible manipulator with
1
= 0
o
(xed) and
2
= variable.
Mode
2
= 0
o
15
o
% Ch. 45
o
% Ch. 90
o
% Ch. 135
o
% Ch.
1 6.40 6.35 0.78 6.12 4.37 5.96 6.87 6.12 4.37
2 10.76 10.54 2.04 9.08 15.61 8.61 19.98 9.08 15.61
3 23.86 23.62 1.01 22.81 4.40 22.50 5.70 22.81 4.40
4 32.13 30.77 4.23 28.38 11.67 27.89 13.20 28.38 11.67
5 52.60 52.03 1.08 50.68 3.65 50.30 4.37 50.68 3.65
6 64.68 62.18 3.86 59.05 8.70 58.54 9.49 59.05 8.70
To study the conguration dependence of the elastic frequencies, rst of all,
those conguration are studied in which the rst joint angle (
1
) is changing and
the second joint angle (
2
) remains xed. Five signicant congurations in this
category are considered and the corresponding frequencies are calculated using
linearized FEM model, as reported in Table 6.12. It can be clearly seen from the
values that there is hardly any change in the resonant frequencies of the two-link
exible manipulator. This is due to the fact that at all the congurations, there
is no change in the second joint angle. So, the inertial forces remains constant
and the manipulator behaves like a structure made up of a single link only, whose
length is equal to the combined lengths of both the original links.
In the next study, those congurations are studied in which the second joint
angle (
2
) is changing and the rst joint angle (
1
) remains xed. Again, the
frequencies at ve dierent congurations are calculated, as given in Table 6.13.
In this case, it is observed that there is a signicant variation in the resonant
frequencies, due to change in the inertial forces. Percentage change in the reso-
nant frequencies are reported in Table 6.14 w.r.t. to the base conguration, i.e.
(
1
) = 0
o
and (
2
) = 0
o
. Maximum percentage change is found to be of the order
126
Controller Parameters
61
CHAPTER 6. RESULTS AND DISCUSSIONS
Table 6.15: Controller parameters of the two-link exible manipulator.
Q diag [ 50000 1 1 15000 1 1 1 1 1 1 1 1 ]
R diag 10
6
[ 1, 1 ]
K
opt
10
4
2.22 0.14 0.49 0.13 0.52 0.55 0.08 0.03 0.01 0.01 0.004 0.001
0.24 0.06 0.006 1.22 0.53 1 0.01 0.01 0.01 0.03 0.008 0.001
L 10
5
[ 0.01 0.14 0.33 0.39 0.64 0.78 1.03 1.18 2.57 3.89 ]
To calculate u
fb
, the feedback compensator is designed using the parame-
ters as given in Table 6.15. The selection of Q and R are on the basis of trial
and error to keep a check on the settling time, maximum overshoot and actu-
ator eort. As all exural states of the exible manipulator are not measur-
able, the reduced-order observer is designed by taking both the actuated joint
positions, i.e. q
1
and q
4
as the measured variables and remaining ten state vari-
ables as unmeasured ones. Thus, the state-vector in partitioned form can be
0 20 40
10
0
10
20
30
40
q
1
(
d
e
g
r
e
e
)
Unshaped
Shaped
0 20 40
0.6
0.4
0.2
0
0.2
0.4
q
2
(
d
e
g
r
e
e
)
Unshaped
Shaped
0 20 40
0.4
0.2
0
0.2
0.4
q
3
(
d
e
g
r
e
e
)
Unshaped
Shaped
0 20 40
0
20
40
60
80
100
q
4
(
d
e
g
r
e
e
)
Time (s)
Unshaped
Shaped
0 20 40
0.1
0.05
0
0.05
0.1
q
5
(
d
e
g
r
e
e
)
Time (s)
Unshaped
Shaped
0 20 40
0.04
0.02
0
0.02
0.04
q
6
(
d
e
g
r
e
e
)
Time (s)
Unshaped
Shaped
(a)
(b) (c)
(d) (e)
(f)
Figure 6.27: Unshaped vs shaped position response of the two-link exible manipu-
lator.
128
Controller Parameters
62
0 5 10 15 20 25 30 35
10
5
0
5
10
u
1
(
N
m
)
Time (s)
Unshaped Toque
Shaped Torque
0 5 10 15 20 25 30 35
4
2
0
2
4
u
2
(
N
m
)
Unshaped Toque
Shaped Torque
2-Mode Shaped Response
Unshaped Response
SimulationPlot
Maximumtrackingerror=20cm(Unshapedcase) 5cm(Shapedcase)
63
CONCLUSIONS
It is demonstrated with three case studies that the proposed control scheme (LQR-
ROO-CS),issucienttotracklargemovementsofexibleroboticmanipulators.
64
Themaincontributionofthisworkisthedevelopmentoftheproposedcontrolscheme,
which is based on linear feedback, for large movement tracking control of highly
nonlinearexiblemanipulators.
It is found in the literature that benets of the combination of feedforward and
feedbackcontrollershavenotbeenexploitedthoroughly.
Largereductionsinvibrationlevelsaswellasininputtorquemagnitudesareobserved
whencomparedtocontrollersimplementedwithoutcommandshaping.
Another signicant outcome of the work is the demonstration of the robustness of
dierent shapers due to variations in the tip-mass of the exible systems. It has been
concludedthatZVDDshaperismorerobusttoparametricvariationsthanaZVshaper.
The present work also contributes to evaluate the degree of nonlinearity present in
exiblesystemsbyperformingthefrequencyanalysis,i.e.congurationdependenceof
theelasticfrequencies.
FUTUREDIRECTIONS
Through dynamic simulations, the work has been implemented successfully on planar
manipulators,whichcanbeextendedtospatialmanipulators.
Theworkcanalsobeextendedtoredundantmanipulatorsfor
Obstacleavoidance,
Increaseinmanipulability,
Singularityavoidance,
Fault-tolerantdesign.
Any form of noise is indispensable with real systems, which can degrade the
performance of the system.The work can be extended to make the feedback channel
morerobustagainstnoiseusingKalmanlters.
65
Finite element code is made extremely general but limited to two exible links only.
Thecodecanberenedinordertohandleageneralnumberofexiblelinks.
The present work can be extended at hardware level by developing a laboratory
prototypeoftheexiblemanipulatorinordertostudythechallengesinvolvedandalso
totesttheeectivenessoftheproposedcontrolschemeonrealsystems.
ThankYou
66
Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Complete Admin Law OutlineДокумент135 страницComplete Admin Law Outlinemarlena100% (1)
- Los Documentos de La Dictadura Que Entregó Estados Unidos (Parte 2)Документ375 страницLos Documentos de La Dictadura Que Entregó Estados Unidos (Parte 2)Todo NoticiasОценок пока нет
- 4 Major Advantages of Japanese Education SystemДокумент3 страницы4 Major Advantages of Japanese Education SystemIsa HafizaОценок пока нет
- AMCAT All in ONEДокумент138 страницAMCAT All in ONEKuldip DeshmukhОценок пока нет
- 2501 Mathematics Paper+with+solution EveningДокумент10 страниц2501 Mathematics Paper+with+solution EveningNenavath GaneshОценок пока нет
- Chapter 8 - FluidДокумент26 страницChapter 8 - FluidMuhammad Aminnur Hasmin B. HasminОценок пока нет
- BIOCHEM REPORT - OdtДокумент16 страницBIOCHEM REPORT - OdtLingeshwarry JewarethnamОценок пока нет
- Ivler vs. Republic, G.R. No. 172716Документ23 страницыIvler vs. Republic, G.R. No. 172716Joey SalomonОценок пока нет
- Supporting References in Release 12 SLA PDFДокумент8 страницSupporting References in Release 12 SLA PDFsoireeОценок пока нет
- Graphic Organizers As A Reading Strategy: Research FindДокумент9 страницGraphic Organizers As A Reading Strategy: Research Findzwn zwnОценок пока нет
- Concrete Design Using PROKONДокумент114 страницConcrete Design Using PROKONHesham Mohamed100% (2)
- Popular Music Analysis and MusicologyДокумент15 страницPopular Music Analysis and MusicologyAlexMartínVidal100% (3)
- Global Marketing & R&D CH 15Документ16 страницGlobal Marketing & R&D CH 15Quazi Aritra ReyanОценок пока нет
- E 05-03-2022 Power Interruption Schedule FullДокумент22 страницыE 05-03-2022 Power Interruption Schedule FullAda Derana100% (2)
- Diabetes & Metabolic Syndrome: Clinical Research & ReviewsДокумент3 страницыDiabetes & Metabolic Syndrome: Clinical Research & ReviewspotatoОценок пока нет
- Domestic and Foreign Policy Essay: Immigration: Salt Lake Community CollegeДокумент6 страницDomestic and Foreign Policy Essay: Immigration: Salt Lake Community Collegeapi-533010636Оценок пока нет
- Organisation Restructuring 2023 MGMT TeamДокумент9 страницOrganisation Restructuring 2023 MGMT TeamArul AravindОценок пока нет
- 2019 Ulverstone Show ResultsДокумент10 страниц2019 Ulverstone Show ResultsMegan PowellОценок пока нет
- English Lesson Plan 6 AugustДокумент10 страницEnglish Lesson Plan 6 AugustKhairunnisa FazilОценок пока нет
- (Music of The African Diaspora) Robin D. Moore-Music and Revolution - Cultural Change in Socialist Cuba (Music of The African Diaspora) - University of California Press (2006) PDFДокумент367 страниц(Music of The African Diaspora) Robin D. Moore-Music and Revolution - Cultural Change in Socialist Cuba (Music of The African Diaspora) - University of California Press (2006) PDFGabrielОценок пока нет
- Facilitation TheoryДокумент2 страницыFacilitation TheoryYessamin Valerie PergisОценок пока нет
- Respiratory Examination OSCE GuideДокумент33 страницыRespiratory Examination OSCE GuideBasmah 7Оценок пока нет
- TOPIC I: Moral and Non-Moral ProblemsДокумент6 страницTOPIC I: Moral and Non-Moral ProblemsHaydee Christine SisonОценок пока нет
- Al-Tawheed According To The SahabahДокумент16 страницAl-Tawheed According To The SahabahShadab AnjumОценок пока нет
- Iso 20816 8 2018 en PDFДокумент11 страницIso 20816 8 2018 en PDFEdwin Bermejo75% (4)
- Business Administration: Hints TipsДокумент11 страницBusiness Administration: Hints Tipsboca ratonОценок пока нет
- Evidentiary Value of NarcoДокумент2 страницыEvidentiary Value of NarcoAdv. Govind S. TehareОценок пока нет
- Framework For Marketing Management Global 6Th Edition Kotler Solutions Manual Full Chapter PDFДокумент33 страницыFramework For Marketing Management Global 6Th Edition Kotler Solutions Manual Full Chapter PDFWilliamThomasbpsg100% (9)
- Created By: Susan JonesДокумент246 страницCreated By: Susan JonesdanitzavgОценок пока нет
- Anti-Epileptic Drugs: - Classification of SeizuresДокумент31 страницаAnti-Epileptic Drugs: - Classification of SeizuresgopscharanОценок пока нет