Вам также может понравиться
- High Efficiency Low-Side N-Channel Controller For Switching RegulatorsДокумент33 страницыHigh Efficiency Low-Side N-Channel Controller For Switching Regulatorssoft4gsmОценок пока нет
- Datasheet 53315Документ30 страницDatasheet 53315Bladimir AngamarcaОценок пока нет
- STRW6252Документ15 страницSTRW6252miltoncgОценок пока нет
- Datasheet PDFДокумент15 страницDatasheet PDFperro sОценок пока нет
- Fan 7530Документ20 страницFan 7530aldo_suviОценок пока нет
- Ic 3843Документ4 страницыIc 3843nishatiwari82Оценок пока нет
- Tps 51125Документ37 страницTps 51125Utube MaОценок пока нет
- Uc2854b EpДокумент13 страницUc2854b EpBruno NascimentoОценок пока нет
- LTC 1625Документ24 страницыLTC 1625Sakura KunОценок пока нет
- LT 1637Документ16 страницLT 1637bojkrvicky100% (1)
- Vow 3120Документ11 страницVow 3120tabassam7801Оценок пока нет
- Constant Current Led DriverДокумент27 страницConstant Current Led DriverJubin JainОценок пока нет
- LCD Bias Power Integrated With WLED Backlight Drivers: FeaturesДокумент31 страницаLCD Bias Power Integrated With WLED Backlight Drivers: FeaturesJoseph BernardОценок пока нет
- 1.5-A Peak Boost/Buck/Inverting Switching Regulators: FeaturesДокумент23 страницы1.5-A Peak Boost/Buck/Inverting Switching Regulators: FeaturesReinaldo VergaraОценок пока нет
- LM3478 High Efficiency Low-Side N-Channel Controller For Switching RegulatorДокумент22 страницыLM3478 High Efficiency Low-Side N-Channel Controller For Switching RegulatorVinoth Kumar RajendranОценок пока нет
- Tps 2051 BДокумент29 страницTps 2051 Bdragon-red0816Оценок пока нет
- LTC 1052Документ25 страницLTC 1052roozbehxoxОценок пока нет
- DatasheetДокумент13 страницDatasheetebertecnicoОценок пока нет
- VND 7 N 04Документ30 страницVND 7 N 04Juan Guillermo MansillaОценок пока нет
- FAN7930BДокумент22 страницыFAN7930Bpagy snv100% (1)
- SG3525A Pulse Width Modulator Control Circuit: 1% and The ErrorДокумент10 страницSG3525A Pulse Width Modulator Control Circuit: 1% and The ErrorJayesh SuryavanshiОценок пока нет
- IC-ON-LINE - CN dm0365r 44840Документ20 страницIC-ON-LINE - CN dm0365r 44840MoscandoОценок пока нет
- Off-Line Quasi-Resonant Switching Regulators Features and Benefits (39Документ9 страницOff-Line Quasi-Resonant Switching Regulators Features and Benefits (39ch3o10836266Оценок пока нет
- 40V Precision Low Power Operational Amplifiers: ISL28117, ISL28217 FeaturesДокумент25 страниц40V Precision Low Power Operational Amplifiers: ISL28117, ISL28217 FeaturesNikole Cueva CevallosОценок пока нет
- CA3140Документ20 страницCA3140Brzata PticaОценок пока нет
- LT 1509Документ17 страницLT 1509Shayeb AhmadОценок пока нет
- Bit 3713Документ24 страницыBit 3713neckoprvak5Оценок пока нет
- Tps 61183Документ25 страницTps 61183GilvaneSilvaОценок пока нет
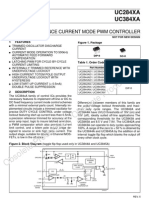
- Uc284xa Uc384xaДокумент16 страницUc284xa Uc384xayusufwpОценок пока нет
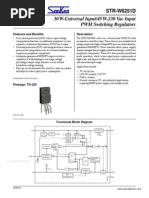
- 60 W-Universal Input/90 W-230 Vac Input PWM Switching RegulatorsДокумент14 страниц60 W-Universal Input/90 W-230 Vac Input PWM Switching RegulatorsIBSDIALLO0% (1)
- 7 M 0880Документ18 страниц7 M 0880Mahmoued YasinОценок пока нет
- SSC2001S Application NoteДокумент18 страницSSC2001S Application NoteGerardo Mendez CamarilloОценок пока нет
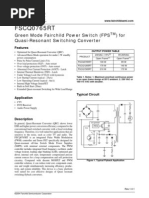
- CQ 0765RTДокумент24 страницыCQ 0765RTsonivitel100% (2)
- BD 9778 FДокумент17 страницBD 9778 Fgogubila2501Оценок пока нет
- HCPL 314JДокумент14 страницHCPL 314JonafetsОценок пока нет
- TLP 250 AДокумент6 страницTLP 250 AbnnmailОценок пока нет
- UC2842A/3A/4A/5A UC3842A/3A/4A/5A: High Performance Current Mode PWM ControllerДокумент16 страницUC2842A/3A/4A/5A UC3842A/3A/4A/5A: High Performance Current Mode PWM ControllerCortés BernaОценок пока нет
- UC3845ANДокумент15 страницUC3845ANMiloud ChouguiОценок пока нет
- STR W6735 DatasheetДокумент13 страницSTR W6735 DatasheetloagerОценок пока нет
- 3685 FBДокумент24 страницы3685 FBPravin MevadaОценок пока нет
- 0.5 Amp IGBT Gate Drive OptocouplerДокумент16 страниц0.5 Amp IGBT Gate Drive Optocouplerdhaka0001d2451Оценок пока нет
- Uc3842b 3843BДокумент10 страницUc3842b 3843Bbob75Оценок пока нет
- 1565 RTДокумент24 страницы1565 RTJose Samuel Robelto RОценок пока нет
- Features Description: LT8610 42V, 2.5A Synchronous Step-Down Regulator With 2.5 A Quiescent CurrentДокумент22 страницыFeatures Description: LT8610 42V, 2.5A Synchronous Step-Down Regulator With 2.5 A Quiescent Currentkunalkundanam1046Оценок пока нет
- STR W6753 DatasheetДокумент8 страницSTR W6753 DatasheetjgerabmОценок пока нет
- UC2842B/3B/4B/5B UC3842B/3B/4B/5B: High Performance Current Mode PWM ControllerДокумент15 страницUC2842B/3B/4B/5B UC3842B/3B/4B/5B: High Performance Current Mode PWM ControllertoajuiceОценок пока нет
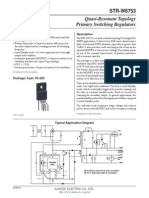
- Quasi-Resonant Topology Primary Switching Regulators: STR-W6756Документ8 страницQuasi-Resonant Topology Primary Switching Regulators: STR-W6756perro sОценок пока нет
- Universal DC/DC Converter: (Top View)Документ11 страницUniversal DC/DC Converter: (Top View)Engine Tuning UpОценок пока нет
- Tps 65160Документ28 страницTps 65160Vukica IvicОценок пока нет
- 78 S 40Документ9 страниц78 S 40Luis AlbertoОценок пока нет
- Ca3140, Ca3140A: 4.5Mhz, Bimos Operational Amplifier With Mosfet Input/Bipolar Output FeaturesДокумент19 страницCa3140, Ca3140A: 4.5Mhz, Bimos Operational Amplifier With Mosfet Input/Bipolar Output FeaturesRicardo Teixeira de AbreuОценок пока нет
- La 42031Документ7 страницLa 42031Deyby GarciaОценок пока нет
- Amplificatori OperazionaliДокумент7 страницAmplificatori Operazionaliconti51Оценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsОт EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsОт EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsРейтинг: 3.5 из 5 звезд3.5/5 (6)
- 110 Waveform Generator Projects for the Home ConstructorОт Everand110 Waveform Generator Projects for the Home ConstructorРейтинг: 4 из 5 звезд4/5 (1)
- Single Ended Active Clamp/Reset PWM: Features DescriptionДокумент16 страницSingle Ended Active Clamp/Reset PWM: Features Descriptioncatsoithahuong84Оценок пока нет
- ST95040 ST95020, ST95010: 4K/2K/1K Serial SPI EEPROM With Positive Clock StrobeДокумент18 страницST95040 ST95020, ST95010: 4K/2K/1K Serial SPI EEPROM With Positive Clock Strobecatsoithahuong84Оценок пока нет
- 16 Mbit SPI Serial Flash: SST25VF016BДокумент28 страниц16 Mbit SPI Serial Flash: SST25VF016Bcatsoithahuong84Оценок пока нет
- PE91/PE97 Series 3.3 V: PECL Clock OscillatorsДокумент8 страницPE91/PE97 Series 3.3 V: PECL Clock Oscillatorscatsoithahuong84Оценок пока нет
- Mpc8349E Powerquicc™ Ii Pro Integrated Host Processor Hardware SpecificationsДокумент88 страницMpc8349E Powerquicc™ Ii Pro Integrated Host Processor Hardware Specificationscatsoithahuong84Оценок пока нет
- D D D D D: SN54ABT125, SN74ABT125 Quadruple Bus Buffer Gates With 3-State OutputsДокумент18 страницD D D D D: SN54ABT125, SN74ABT125 Quadruple Bus Buffer Gates With 3-State Outputscatsoithahuong84Оценок пока нет
- Flash Rom S29al016d70tfi02Документ58 страницFlash Rom S29al016d70tfi02Hoang Le100% (1)
- Flyback Transformers: SchematicsДокумент2 страницыFlyback Transformers: Schematicscatsoithahuong84Оценок пока нет
- Flash Rom S29al016d70tfi02Документ58 страницFlash Rom S29al016d70tfi02Hoang Le100% (1)
- Quidway s5300 Series Switches BrochureДокумент16 страницQuidway s5300 Series Switches Brochurecatsoithahuong84Оценок пока нет
- Double Data Rate (DDR) SdramДокумент8 страницDouble Data Rate (DDR) Sdramcatsoithahuong84Оценок пока нет
- NE8392C Coaxial Transceiver Interface For Ethernet/Thin EthernetДокумент9 страницNE8392C Coaxial Transceiver Interface For Ethernet/Thin Ethernetcatsoithahuong84Оценок пока нет
- Ltc1629/Ltc1629-Pg Polyphase, High Efficiency, Synchronous Step-Down Switching RegulatorsДокумент28 страницLtc1629/Ltc1629-Pg Polyphase, High Efficiency, Synchronous Step-Down Switching Regulatorscatsoithahuong84Оценок пока нет
- Parallelable, Clamped Two-Switch Power-Supply Controller IC: General Description FeaturesДокумент21 страницаParallelable, Clamped Two-Switch Power-Supply Controller IC: General Description Featurescatsoithahuong84Оценок пока нет
- MC 68302Документ480 страницMC 68302catsoithahuong84Оценок пока нет
- Features Description: 4-Ampere Dual Low-Side Ultrafast MOSFET DriversДокумент13 страницFeatures Description: 4-Ampere Dual Low-Side Ultrafast MOSFET Driverscatsoithahuong84Оценок пока нет
- MC14528B Dual Monostable Multivibrator: PDIP-16 P Suffix CASE 648Документ12 страницMC14528B Dual Monostable Multivibrator: PDIP-16 P Suffix CASE 648catsoithahuong84Оценок пока нет
- Max 3237Документ16 страницMax 32372065001779207Оценок пока нет
- Ispmach 4000V/B/C/Z Family: FeaturesДокумент74 страницыIspmach 4000V/B/C/Z Family: Featurescatsoithahuong84Оценок пока нет
- Unisonic Technologies Co., LTD: Single-Supply Dual Operational AmplifierДокумент6 страницUnisonic Technologies Co., LTD: Single-Supply Dual Operational Amplifiercatsoithahuong84Оценок пока нет
- Features Descriptio: LT4250L/LT4250H Negative 48V Hot Swap ControllerДокумент12 страницFeatures Descriptio: LT4250L/LT4250H Negative 48V Hot Swap Controllercatsoithahuong84Оценок пока нет
- Miniature, Low-Voltage, Precision Step-Down Controller: General Description - FeaturesДокумент20 страницMiniature, Low-Voltage, Precision Step-Down Controller: General Description - Featurescatsoithahuong84Оценок пока нет
- Features Descriptio: LT4250L/LT4250H Negative 48V Hot Swap ControllerДокумент12 страницFeatures Descriptio: LT4250L/LT4250H Negative 48V Hot Swap Controllercatsoithahuong84Оценок пока нет
- Quad 2-Input AND Gate: KK74HC08AДокумент5 страницQuad 2-Input AND Gate: KK74HC08Acatsoithahuong84Оценок пока нет
- LMC64821 NДокумент22 страницыLMC64821 NLucaDirafОценок пока нет
- Icl3221, Icl3222, Icl3223, Icl3232, Icl3241, Icl3243Документ28 страницIcl3221, Icl3222, Icl3223, Icl3232, Icl3241, Icl3243catsoithahuong84Оценок пока нет
- Machxo Family Data Sheet: Ds1002 Version 02.7, November 2007Документ95 страницMachxo Family Data Sheet: Ds1002 Version 02.7, November 2007catsoithahuong84Оценок пока нет
- Intel IXP2350 Network Processor: Enables Access and Edge Applications To 2 GbpsДокумент8 страницIntel IXP2350 Network Processor: Enables Access and Edge Applications To 2 Gbpscatsoithahuong84Оценок пока нет
- Datasheet Dh321Документ20 страницDatasheet Dh32193082Оценок пока нет
- Multiplexer Lab Report - Boolean FunctionsДокумент7 страницMultiplexer Lab Report - Boolean FunctionsZabeehullahmiakhailОценок пока нет
- Generator Protection CoordinationДокумент6 страницGenerator Protection Coordinationb33lawОценок пока нет
- Canon TX Film Camera User ManualДокумент24 страницыCanon TX Film Camera User ManualPepe ZonОценок пока нет
- Standards and Testing in TaiwanДокумент32 страницыStandards and Testing in TaiwanEuzebioОценок пока нет
- Activity 2 Role Play ScriptДокумент4 страницыActivity 2 Role Play ScriptAnne Marieline BuenaventuraОценок пока нет
- Fieldbook A1 - enДокумент2 страницыFieldbook A1 - enCarlos RiveraОценок пока нет
- Oscillators and Wave Shaping Circuits ExplainedДокумент20 страницOscillators and Wave Shaping Circuits Explainedgebretsadkan abrhaОценок пока нет
- Electric Power Transmission System Engineering Analysis and DesignДокумент10 страницElectric Power Transmission System Engineering Analysis and DesignJyothsna VayyalaОценок пока нет
- International Product Development (S EM2 AF-2022/3) 55-701896-AF-20223 Project Idea: Self-Cleaning Solar PanelsДокумент19 страницInternational Product Development (S EM2 AF-2022/3) 55-701896-AF-20223 Project Idea: Self-Cleaning Solar PanelsJerin James 3jОценок пока нет
- Multisim DatasheetДокумент4 страницыMultisim DatasheetMohamed AbousenaОценок пока нет
- Fire Prevention and ProtectionДокумент11 страницFire Prevention and ProtectionManikant SAhОценок пока нет
- Vacon NX Lift Application Manual UD00758L ENДокумент69 страницVacon NX Lift Application Manual UD00758L ENDean LefebvreОценок пока нет
- Thyristor Firing Circuit: Rs = 10-22 Ω Rg = 1 kΩ Cg = 0.01 μF - 0.1μFДокумент10 страницThyristor Firing Circuit: Rs = 10-22 Ω Rg = 1 kΩ Cg = 0.01 μF - 0.1μFAnil Kumar SinghОценок пока нет
- Get great graphics at a great price with Foxconn's G43MX-KДокумент4 страницыGet great graphics at a great price with Foxconn's G43MX-Kplataforma8791Оценок пока нет
- PCinfoДокумент39 страницPCinfoOier BadiolairiarteОценок пока нет
- Understanding audio block diagrams through a schematic exampleДокумент18 страницUnderstanding audio block diagrams through a schematic exampleS NОценок пока нет
- Lamb ChopДокумент5 страницLamb ChopZenonОценок пока нет
- Faraday RotationДокумент21 страницаFaraday RotationAkash SinghОценок пока нет
- Yasser Auda CCIEv5 EPC OverviewДокумент5 страницYasser Auda CCIEv5 EPC OverviewQuang AnhОценок пока нет
- Project Proposal FormДокумент3 страницыProject Proposal FormVigneshwaran SrinivasanОценок пока нет
- HP 260 G3 Desktop Mini Business PC PDFДокумент29 страницHP 260 G3 Desktop Mini Business PC PDFRuben LopezОценок пока нет
- Burdick 3100 - 6100 Service ManualДокумент46 страницBurdick 3100 - 6100 Service ManualJoe SmuckatelliОценок пока нет
- Segmentation - PreethiДокумент30 страницSegmentation - Preethinishaudayshankar34Оценок пока нет
- Ethernet Passive Optical Networks Mcgraw Hill Professional PDFДокумент2 страницыEthernet Passive Optical Networks Mcgraw Hill Professional PDFAngelОценок пока нет
- CPK60DWS DriverGuideE V300Документ16 страницCPK60DWS DriverGuideE V300PaquitoОценок пока нет
- Module 24 SAHITA Electrical InstallationДокумент16 страницModule 24 SAHITA Electrical InstallationLungisaniОценок пока нет
- Pulse Secure Appliance Series: Purpose-built for Next Generation Secure AccessДокумент3 страницыPulse Secure Appliance Series: Purpose-built for Next Generation Secure AccessT AnnapooraniОценок пока нет
- Electronics Corporation of Technology Consultant Services - WorldДокумент5 страницElectronics Corporation of Technology Consultant Services - WorldqwwqqqqqqqqqqОценок пока нет
- Lithium-Air BatteryДокумент29 страницLithium-Air BatteryNagabhushana100% (1)
- LG 50PQ30 Plasma TV SpecificationsДокумент2 страницыLG 50PQ30 Plasma TV Specificationsdrsajithnv100% (2)