Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- DPPONIUPACSUPERSIXER4Документ5 страницDPPONIUPACSUPERSIXER4Kartik YadavОценок пока нет
- 3-Organic Synthesis (MSC 4th Sem)Документ83 страницы3-Organic Synthesis (MSC 4th Sem)madhu9347253214Оценок пока нет
- OCOC-1 Live Class-1 Teacher NotesДокумент37 страницOCOC-1 Live Class-1 Teacher Notesmardarchod 123Оценок пока нет
- Part IB - Groups, Rings and Modules: TheoremsДокумент13 страницPart IB - Groups, Rings and Modules: TheoremsMoe KhalidОценок пока нет
- II.7. Nilpotent and Solvable Groups 1Документ11 страницII.7. Nilpotent and Solvable Groups 1Badan KatuwalОценок пока нет
- Classification of The Japonic Languages - WikipediaДокумент13 страницClassification of The Japonic Languages - Wikipediayukiko10Оценок пока нет
- MA Lecture 5 Group of PermutationsДокумент3 страницыMA Lecture 5 Group of PermutationsmjhiraparaОценок пока нет
- IsomerismДокумент49 страницIsomerismkarmanyaraina4Оценок пока нет
- Abstract Algebra - 1Документ13 страницAbstract Algebra - 1Arjun MОценок пока нет
- Nihongo Lesson 2Документ14 страницNihongo Lesson 2Sidney LaoОценок пока нет
- ErrorДокумент6 страницErrorWQ RizalОценок пока нет
- 1699011126Документ1 страница1699011126Rutvik KayasthaОценок пока нет
- AustronesianДокумент19 страницAustronesianLeo VillacruzОценок пока нет
- Analisis Senyawa Dengan Menggunakan Toxtree VДокумент20 страницAnalisis Senyawa Dengan Menggunakan Toxtree VJullia SantiОценок пока нет
- Group of Lie TypeДокумент7 страницGroup of Lie TypeNicolásОценок пока нет
- Givaudan Price List PDFДокумент7 страницGivaudan Price List PDFT H100% (4)
- Chapter 20: Introduction To Carbonyl Chemistry Organometallic Reagents Oxidation and ReductionДокумент26 страницChapter 20: Introduction To Carbonyl Chemistry Organometallic Reagents Oxidation and ReductioneliОценок пока нет
- Abstract Algebra Course SyllabusДокумент1 страницаAbstract Algebra Course SyllabusCan TezcanОценок пока нет
- Lecture Planner - Organic Chemistry - (Only PDFДокумент3 страницыLecture Planner - Organic Chemistry - (Only PDFGeorge FloydОценок пока нет
- 2.1 UST Group TheoryДокумент14 страниц2.1 UST Group TheorythebestОценок пока нет
- Chapter 19. Aldehydes and Ketones: Nucleophilic Addition ReactionsДокумент45 страницChapter 19. Aldehydes and Ketones: Nucleophilic Addition ReactionsPra YogaОценок пока нет
- R IS IR: Iupac & NomenclatureДокумент11 страницR IS IR: Iupac & NomenclatureDhruv KuchhalОценок пока нет
- Conversion Chart Organic ChemistryДокумент1 страницаConversion Chart Organic ChemistryVishakha0% (1)
- IUPAC NOMENCLATURE by Bharat PanchalДокумент34 страницыIUPAC NOMENCLATURE by Bharat Panchalvansh ranaОценок пока нет
- Dummit SolvableДокумент18 страницDummit SolvableArmen AvagyanОценок пока нет
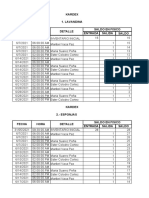
- Kardex 1. Lavandina Fecha Hora Detalle Saldo en Fisico Entrada Salida SaldoДокумент16 страницKardex 1. Lavandina Fecha Hora Detalle Saldo en Fisico Entrada Salida Saldonatalia perez almanzaОценок пока нет
- Complete Course Organic ChemistrДокумент11 страницComplete Course Organic Chemistrmanash-12Оценок пока нет
- Arawak Carib Ge TupiДокумент20 страницArawak Carib Ge TupiBruno de Souza BarretoОценок пока нет
- 1617589991278CodingBat Warmup2Документ7 страниц1617589991278CodingBat Warmup2JUAN CARLOS ANTONIO NIZAMA CESPEDESОценок пока нет
- Karnataka PinocdeДокумент13 страницKarnataka PinocdeWipro Foundation KARОценок пока нет