Вам также может понравиться
- TS 3.02.01 RES I2Документ12 страницTS 3.02.01 RES I2Madhusudhan SrinivasanОценок пока нет
- 1-Policy Statement CT VT Cores Protection v1.0Документ5 страниц1-Policy Statement CT VT Cores Protection v1.0Madhusudhan SrinivasanОценок пока нет
- Open Networks 2020 Ws1b p3 Operational Tripping Scheme ArrangementsДокумент27 страницOpen Networks 2020 Ws1b p3 Operational Tripping Scheme ArrangementsMadhusudhan SrinivasanОценок пока нет
- A New Configuration of Two-Level 48-Pulse VSCs Based STATCOM For Voltage RegulatioДокумент7 страницA New Configuration of Two-Level 48-Pulse VSCs Based STATCOM For Voltage RegulatioMadhusudhan SrinivasanОценок пока нет
- 4-Policy Statement Busbar Configuration v3.0Документ10 страниц4-Policy Statement Busbar Configuration v3.0Madhusudhan SrinivasanОценок пока нет
- Wind Turbine Generator System Power Quality Test Report For The Gaia Wind 11-kW Wind TurbineДокумент37 страницWind Turbine Generator System Power Quality Test Report For The Gaia Wind 11-kW Wind TurbineMadhusudhan SrinivasanОценок пока нет
- RG CE ENTSO-E Defence Plan Final 2011 Public 110131Документ85 страницRG CE ENTSO-E Defence Plan Final 2011 Public 110131Madhusudhan SrinivasanОценок пока нет
- Design Practices in Harmonic Analysis Studies Applied To Industrial Electrical Power SystemsДокумент6 страницDesign Practices in Harmonic Analysis Studies Applied To Industrial Electrical Power SystemsMadhusudhan SrinivasanОценок пока нет
- Automation and Integration Solutions For Electric Power SystemsДокумент16 страницAutomation and Integration Solutions For Electric Power SystemsMadhusudhan SrinivasanОценок пока нет
- WETF-wind Power PDFДокумент342 страницыWETF-wind Power PDFMadhusudhan SrinivasanОценок пока нет
- InTech-Power Quality in Grid Connected Wind Turbines PDFДокумент25 страницInTech-Power Quality in Grid Connected Wind Turbines PDFMadhusudhan SrinivasanОценок пока нет
- Conventional Power Plants EUДокумент137 страницConventional Power Plants EUMadhusudhan SrinivasanОценок пока нет
- Sequence Impedance in Different Power EquipmentsДокумент7 страницSequence Impedance in Different Power EquipmentsMadhusudhan Srinivasan0% (1)
- Calculation The Internal Thermal Resistance and Am Pacity of 3-Core Screened Cables With FillersДокумент6 страницCalculation The Internal Thermal Resistance and Am Pacity of 3-Core Screened Cables With FillersMadhusudhan SrinivasanОценок пока нет
- Basilica: 07:00 - 19:00: It's A Pedestrian Area. Can Be Visited in The EndДокумент2 страницыBasilica: 07:00 - 19:00: It's A Pedestrian Area. Can Be Visited in The EndMadhusudhan SrinivasanОценок пока нет
- StudiesДокумент3 страницыStudiesMadhusudhan SrinivasanОценок пока нет
- Circulating Current FGДокумент10 страницCirculating Current FGMadhusudhan SrinivasanОценок пока нет
- 121126performance MeasurementworkshopДокумент39 страниц121126performance MeasurementworkshopMadhusudhan SrinivasanОценок пока нет
- Floyd Brown EditorialДокумент2 страницыFloyd Brown EditorialMadhusudhan SrinivasanОценок пока нет
- IEEE - Structure in The Computation of Power System Nonlinear Dynamical ResponseДокумент6 страницIEEE - Structure in The Computation of Power System Nonlinear Dynamical ResponseMadhusudhan SrinivasanОценок пока нет
- Influence of Governors On Power System Transient StabilityДокумент9 страницInfluence of Governors On Power System Transient StabilityMadhusudhan SrinivasanОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Uputstvo Za Laptop ASUS K53EДокумент110 страницUputstvo Za Laptop ASUS K53EPedja VukovicОценок пока нет
- Beyer Dt300 HeadphonesДокумент2 страницыBeyer Dt300 HeadphonesJames Joyce100% (1)
- Thesis DocumentДокумент17 страницThesis DocumentHarold Asuncion100% (1)
- All Motor Ics ListДокумент8 страницAll Motor Ics Listankush sharmaОценок пока нет
- Fuzzy Inference SystemДокумент10 страницFuzzy Inference SystemPradeepdarshan PradeepОценок пока нет
- Instrument Transformer Fuses Types WBP and BRT: Catalogue B12/06/01/EДокумент8 страницInstrument Transformer Fuses Types WBP and BRT: Catalogue B12/06/01/EivanramljakОценок пока нет
- Trinamic Motor Drive ControllerДокумент96 страницTrinamic Motor Drive Controllerwert1a2Оценок пока нет
- Format-Con-5 Draft Connection Offer Letter For Connection To The Inter-State Transmission GridДокумент2 страницыFormat-Con-5 Draft Connection Offer Letter For Connection To The Inter-State Transmission GridryreddyОценок пока нет
- MaestroДокумент32 страницыMaestrodanielhoseaОценок пока нет
- Electrical Machines IIДокумент8 страницElectrical Machines IImadhueeОценок пока нет
- 9420 Series: Digital Delay Pulse GeneratorДокумент2 страницы9420 Series: Digital Delay Pulse GeneratorQuantum Composers, Inc.Оценок пока нет
- Vp0104 Vp0106 Vp0109 P-Channel Enhancement-Mode Vertical Dmos FetsДокумент4 страницыVp0104 Vp0106 Vp0109 P-Channel Enhancement-Mode Vertical Dmos FetsGabriel RacovskyОценок пока нет
- Westermo Ds md-45 PDFДокумент2 страницыWestermo Ds md-45 PDFPablo TeránОценок пока нет
- rr220402 Electrical TechnologyДокумент8 страницrr220402 Electrical TechnologySRINIVASA RAO GANTAОценок пока нет
- هندسة قوى كهربية دكتور عادل2016Документ178 страницهندسة قوى كهربية دكتور عادل2016AHMED BAKRОценок пока нет
- FoEN Transient Analysis Color 1upДокумент28 страницFoEN Transient Analysis Color 1upPruthvi NinganurОценок пока нет
- Simulation of MPPT Techniques Using Quadratic Boost Converter For PV SystemДокумент11 страницSimulation of MPPT Techniques Using Quadratic Boost Converter For PV SystemTandin TshewangОценок пока нет
- Interphonef5xt Instruction Manual enДокумент15 страницInterphonef5xt Instruction Manual enphil2ncОценок пока нет
- ST 1600Документ27 страницST 1600Gustavo RussoОценок пока нет
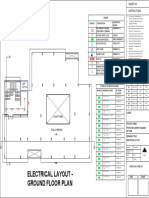
- Electrical Layout - Ground Floor Plan: Sheet No. InstructionsДокумент1 страницаElectrical Layout - Ground Floor Plan: Sheet No. InstructionsAbhishek AjayОценок пока нет
- Unit 1 AmeДокумент72 страницыUnit 1 AmemaheswarisubramaniОценок пока нет
- A Method of Line Fault Location Based On Traveling Wave TheoryДокумент10 страницA Method of Line Fault Location Based On Traveling Wave TheorySuginoMarwotoОценок пока нет
- LG 32PC51 PP78CДокумент25 страницLG 32PC51 PP78Cserii123456Оценок пока нет
- Axial Ae 1 Esc ManualДокумент1 страницаAxial Ae 1 Esc ManualEnache DanielОценок пока нет
- MHADA Investigation ReportДокумент12 страницMHADA Investigation Reportkuldip purohitОценок пока нет
- Installation Information Emg Model: S/S/89, 81-Tw Combination SystemДокумент5 страницInstallation Information Emg Model: S/S/89, 81-Tw Combination SystemJuninho ESPОценок пока нет
- 511Документ3 страницы511bharath1024Оценок пока нет
- 390Документ1 страница390aqobumОценок пока нет
- Notes7 Applying Synthesis ConstraintsДокумент18 страницNotes7 Applying Synthesis ConstraintsravishopingОценок пока нет
- Ap326310 Tc1765bootstraploader v1.0 2002 03Документ32 страницыAp326310 Tc1765bootstraploader v1.0 2002 03Poon Electronic Training CentreОценок пока нет