Вам также может понравиться
- Análisis Matricial de Las Estructuras Por El Método de La RigidezДокумент43 страницыAnálisis Matricial de Las Estructuras Por El Método de La RigidezDany Miguel Zapana MendizabalОценок пока нет
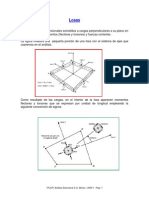
- Analisis de Losas PDFДокумент4 страницыAnalisis de Losas PDFJulio LoayzaОценок пока нет
- Estru 4Документ14 страницEstru 4Maryorie Perez CoveñasОценок пока нет
- Metodo de La Rigidez en Estructuras InclinadasДокумент6 страницMetodo de La Rigidez en Estructuras Inclinadaslarry01_05Оценок пока нет
- Materiales y Construccion IIДокумент3 страницыMateriales y Construccion IIJoseCespedesDezaОценок пока нет
- Borrador Libro Actualizado Estructuras Metalicas 10-11-2021Документ137 страницBorrador Libro Actualizado Estructuras Metalicas 10-11-2021maria perezОценок пока нет
- Tarea 2. Mecanica Avanzada 2019-1Документ3 страницыTarea 2. Mecanica Avanzada 2019-1edgar100% (1)
- Ejemplo de Viga CompuestaДокумент5 страницEjemplo de Viga CompuestaHector Rangel Rios HernandezОценок пока нет
- TFM MelendezДокумент140 страницTFM MelendezYesenia VillarroelОценок пока нет
- Estructuracion IdealizacionДокумент13 страницEstructuracion IdealizacionannjackelinОценок пока нет
- Rigidez de Miembros-Armaduras PlanasДокумент15 страницRigidez de Miembros-Armaduras PlanasAldo Luis Carnero Soria100% (1)
- Ejercicios Metálicas Flexión y CortanteДокумент118 страницEjercicios Metálicas Flexión y CortanteMARCELA CARRILLOОценок пока нет
- Clase Vi Estructuras I. Método MatricialДокумент42 страницыClase Vi Estructuras I. Método MatricialYarelis NoriegaОценок пока нет
- Análisis Estructural de Marcos Planos Ortogonales en ExcelДокумент62 страницыAnálisis Estructural de Marcos Planos Ortogonales en ExcelalexsdiazОценок пока нет
- Analisis Modal EspectralДокумент15 страницAnalisis Modal EspectralDianis MedinaОценок пока нет
- Actividad Evaluativa 1 PDFДокумент12 страницActividad Evaluativa 1 PDFJhonatan Quintero Toro100% (1)
- MTorres Coleic2014ParteIДокумент128 страницMTorres Coleic2014ParteImarcobarcelonaОценок пока нет
- Clase 01 de Ingeniería de Cimentaciones - Concreto Armado IIДокумент61 страницаClase 01 de Ingeniería de Cimentaciones - Concreto Armado IIFavio FloresОценок пока нет
- Zapata Basico SAPДокумент13 страницZapata Basico SAPAugusto Alex Huaranca OlivaresОценок пока нет
- Movimiento Uniforme en Canales y Tuberias Grupo 2 (Rodriguez No Trabajó)Документ32 страницыMovimiento Uniforme en Canales y Tuberias Grupo 2 (Rodriguez No Trabajó)Piero Arcos CerronОценок пока нет
- Cálculo de Muros de ContenciónДокумент4 страницыCálculo de Muros de ContenciónAdriana DiazОценок пока нет
- Ejemplo de Viga de AcopleДокумент13 страницEjemplo de Viga de AcopleMaria Alejandra Rivas HueteОценок пока нет
- Ejemplo Portico Metodo Rigidez EstandarДокумент7 страницEjemplo Portico Metodo Rigidez EstandarIvan Williams SucuitanaОценок пока нет
- Análisis de Vivienda Unifamiliar Aplicando El Teorema de CastiglianoДокумент33 страницыAnálisis de Vivienda Unifamiliar Aplicando El Teorema de CastiglianoGiancarlo René Bendezú MartínezОценок пока нет
- Metodo de Elementos Finitos-TrДокумент33 страницыMetodo de Elementos Finitos-TrRoberto DavisОценок пока нет
- Indicial 1Документ7 страницIndicial 1Jorge Roberto Bravo SotoОценок пока нет
- Estrada Porras Franz EmmanuelДокумент6 страницEstrada Porras Franz EmmanuelOdar GarciaОценок пока нет
- Diseño Sismico - EstaticoДокумент13 страницDiseño Sismico - EstaticoAnabel Zapana ApomaytaОценок пока нет
- Estructuras IsostaticasДокумент12 страницEstructuras IsostaticasEmilio ZayagoОценок пока нет
- Memoria de Desvío + Nehemías Domínguez SánchezДокумент6 страницMemoria de Desvío + Nehemías Domínguez SáncheznehemiasОценок пока нет
- 6 Etabs Edificio de 5 Niveles Con Losa Macisa y ReticularДокумент10 страниц6 Etabs Edificio de 5 Niveles Con Losa Macisa y ReticularCiro Franz Mucha MaytaОценок пока нет
- Apuntes Sobre Estructuras IsostáticasДокумент1 772 страницыApuntes Sobre Estructuras IsostáticasjocksanОценок пока нет
- Proyecto de Analisis EstructuralДокумент19 страницProyecto de Analisis EstructuralAlex BanderaОценок пока нет
- Ejercicios Dinamica Estructural PDFДокумент4 страницыEjercicios Dinamica Estructural PDFludwingОценок пока нет
- Capitulo 5 Flexion HiperestaticaДокумент24 страницыCapitulo 5 Flexion HiperestaticaCarlos LojaОценок пока нет
- Resolución de Estructuras Hiperestáticas Con El Método de Flexibilidades PDFДокумент10 страницResolución de Estructuras Hiperestáticas Con El Método de Flexibilidades PDFGabriel Angel Coayla VivancoОценок пока нет
- Teoria Condensacion EstáticaДокумент7 страницTeoria Condensacion EstáticaEdison Geovanny TierraОценок пока нет
- Estático Equivalente EjercicioДокумент28 страницEstático Equivalente EjercicioLuis MillanОценок пока нет
- Calculo Estructural de Un Edificio de Hormigon Armado Con ETABSДокумент12 страницCalculo Estructural de Un Edificio de Hormigon Armado Con ETABSDilson SirpaОценок пока нет
- Diseño Por Torsión (Concreto Armado 1)Документ7 страницDiseño Por Torsión (Concreto Armado 1)Luis Quispe Chipa100% (1)
- Unidad II-Act 2 Estructuras IДокумент3 страницыUnidad II-Act 2 Estructuras Iluispdzp100% (1)
- Analisis Estructural IIДокумент68 страницAnalisis Estructural IIJeremias100% (1)
- Criterios de ModeladoДокумент12 страницCriterios de ModeladoJavier RamirezОценок пока нет
- Diagramas de Momento y Cortante en VigasДокумент6 страницDiagramas de Momento y Cortante en VigasEnri13Оценок пока нет
- Calculo VientoДокумент23 страницыCalculo Vientoferdyabejar100% (1)
- Líneas de InfluenciaДокумент15 страницLíneas de InfluenciaMoisésОценок пока нет
- Trabajo Final PorticosДокумент41 страницаTrabajo Final PorticosJosé Alberto Alonso Neira ConchaОценок пока нет
- Diagramas de Interaccion para ColumnasДокумент34 страницыDiagramas de Interaccion para ColumnasNesgri Balmaceda PerezОценок пока нет
- Ebook o Efeito P Delta 170321215754.Pt - EsДокумент22 страницыEbook o Efeito P Delta 170321215754.Pt - EsEdwin Edilberto SuriОценок пока нет
- C10. - Vigas TДокумент10 страницC10. - Vigas TFERNANDO VALERA RUIZОценок пока нет
- Guia UsuarioДокумент234 страницыGuia UsuarioJosé Antonio Alarcón León100% (1)
- Condensacion de EcuacionesДокумент44 страницыCondensacion de EcuacionesDavid Vilca BardalesОценок пока нет
- Informe de Elementos BiarticuladosДокумент11 страницInforme de Elementos BiarticuladosFELIX GUMERCINDO FLORES CORREAОценок пока нет
- Condensación Estática y Rigidez LateralДокумент37 страницCondensación Estática y Rigidez LateralMarcoAntonioLunaLopez100% (2)
- Laboratorio - N3 - Meza Pariona, Jorge Luis - 20180468KДокумент14 страницLaboratorio - N3 - Meza Pariona, Jorge Luis - 20180468KjorgeОценок пока нет
- Modelado Geometrico y Analisis Por FEMДокумент10 страницModelado Geometrico y Analisis Por FEMVidal RicanoОценок пока нет
- Tarea 05 201320Документ3 страницыTarea 05 201320Mauricio Senior RamírezОценок пока нет
- Curso-Consteel CONSTEEL 2Документ14 страницCurso-Consteel CONSTEEL 2aloОценок пока нет
- Informe Hormigon Armado 2Документ44 страницыInforme Hormigon Armado 2Pablo Ramirez Rodriguez100% (1)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoОт EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoРейтинг: 4.5 из 5 звезд4.5/5 (12)
- Memoria Descriptiva - Arquitectura - PropuestaДокумент27 страницMemoria Descriptiva - Arquitectura - PropuestaMili Tipe AnayaОценок пока нет
- Clase 05-Resolución de Ecuaciones No Lineales PDFДокумент57 страницClase 05-Resolución de Ecuaciones No Lineales PDFMili Tipe AnayaОценок пока нет
- Reglamento de La Zona Monumental de VilcashuamanДокумент77 страницReglamento de La Zona Monumental de VilcashuamanMili Tipe AnayaОценок пока нет
- Plantilla Manual Matlab PDFДокумент79 страницPlantilla Manual Matlab PDFMili Tipe AnayaОценок пока нет
- Matriz de Consistencia01Документ1 страницаMatriz de Consistencia01Mili Tipe AnayaОценок пока нет
- Informe Hidraulica Fluvial Puente 01Документ13 страницInforme Hidraulica Fluvial Puente 01Mili Tipe AnayaОценок пока нет
- Propuesta de Desarrollo Urbano Diriamba CorregidaДокумент59 страницPropuesta de Desarrollo Urbano Diriamba Corregidaextenny100% (1)
- Examen Mecanica de Suelos IIДокумент13 страницExamen Mecanica de Suelos IIMili Tipe Anaya100% (5)
- Utilización Del Modo de Programación Labview Fpga Interferance Con El Módulo Ni 9219Документ38 страницUtilización Del Modo de Programación Labview Fpga Interferance Con El Módulo Ni 9219Sergio CázaresОценок пока нет
- Metodo de AsignacionДокумент31 страницаMetodo de AsignacionWILMER EDISON QUISPE HUAMANОценок пока нет
- Cap12 Aplicaciones LinealesДокумент27 страницCap12 Aplicaciones LinealesJuan Reyes PasteneОценок пока нет
- Muro Diafragma de ConcretoДокумент10 страницMuro Diafragma de ConcretoJuancar1osОценок пока нет
- Actividad 2 Matrices y SubordinadasДокумент5 страницActividad 2 Matrices y SubordinadasMaritza Rodriguez SantamariaОценок пока нет
- Diapositivas Segundo ParcialДокумент70 страницDiapositivas Segundo ParcialEsteban Sarrazola RendonОценок пока нет
- Copia de Machine-Learning-con-Python-Aprendizaje-Supervisado-V2Документ108 страницCopia de Machine-Learning-con-Python-Aprendizaje-Supervisado-V2cristian lopez100% (11)
- AL U2 R3 InstruccionesPDF ProducciónДокумент2 страницыAL U2 R3 InstruccionesPDF ProducciónSerrano JimenezОценок пока нет
- Sobre Transformaciones LinealesДокумент16 страницSobre Transformaciones Linealesun lectorОценок пока нет
- T2 Arreglos MultidimensionalesДокумент15 страницT2 Arreglos MultidimensionalesSantiago LabradaОценок пока нет
- Practica N°8 - Teclado Matricial y Pantalla LCD 16x2Документ3 страницыPractica N°8 - Teclado Matricial y Pantalla LCD 16x2ANDRES AFANADOR GUIZA100% (1)
- Implementacion de Estrategias Computacionalmente Eficientes para Modelar ProblemasДокумент114 страницImplementacion de Estrategias Computacionalmente Eficientes para Modelar ProblemasPatriciaBañezMautinoОценок пока нет
- Rotación y DeformaciónДокумент2 страницыRotación y DeformaciónArumi MarОценок пока нет
- Ecua. Segundo Orden en Matlab PDFДокумент6 страницEcua. Segundo Orden en Matlab PDFAldo QuesadaОценок пока нет
- Matriz Jacobiana de Un RobotДокумент6 страницMatriz Jacobiana de Un RobotgloretogОценок пока нет
- Ejercicios MRP PPCOДокумент17 страницEjercicios MRP PPCOAngel FernandoОценок пока нет
- Metodos de Conteo y RelacionesДокумент16 страницMetodos de Conteo y RelacionesCourtney WheelerОценок пока нет
- Nueva Plantilla para DeberesДокумент7 страницNueva Plantilla para DeberesFernando GutiérrezОценок пока нет
- Matriz de LeoДокумент20 страницMatriz de LeoAdriana AlejandroОценок пока нет
- Guía de Actividades y Rúbrica de Evaluación - Unidad 2 - Tarea 3 - Reseña Informativa, Análisis de La Comunicación No Verbal.Документ11 страницGuía de Actividades y Rúbrica de Evaluación - Unidad 2 - Tarea 3 - Reseña Informativa, Análisis de La Comunicación No Verbal.PLAGOОценок пока нет
- Apuntes de Álgebra Lineal 2Документ17 страницApuntes de Álgebra Lineal 2caibacord6Оценок пока нет
- Ali U2 A2 SGSДокумент4 страницыAli U2 A2 SGSsulygsОценок пока нет
- Matlab Intro1Документ45 страницMatlab Intro1July Andrea Gomez Camperos100% (3)
- Ejercicios ProcesosEstocásticosДокумент2 страницыEjercicios ProcesosEstocásticosEdwiinOrtizZОценок пока нет
- Recopilacion de FinalesДокумент8 страницRecopilacion de FinalesLuna CasseОценок пока нет
- Proceso de Producción para La Línea de Producción Queso CheddarДокумент13 страницProceso de Producción para La Línea de Producción Queso CheddarMAYRA ALEJANDRA MOSQUERA CABRERAОценок пока нет
- Wuolah Free Apuntes Algebra Lineal1Документ149 страницWuolah Free Apuntes Algebra Lineal1Eva Terrero NúñezОценок пока нет
- Matriz de StakeholdersДокумент17 страницMatriz de StakeholdersheberОценок пока нет
- Clase 14.1 Matrices (Parte 1)Документ21 страницаClase 14.1 Matrices (Parte 1)esteban nestorОценок пока нет
- Ma1019 hw08 Sol PDFДокумент5 страницMa1019 hw08 Sol PDFGloria suarez rodriguezОценок пока нет