Вам также может понравиться
- Tutorial Sistema Vendas em Java Com SwingДокумент75 страницTutorial Sistema Vendas em Java Com Swingrogbbb200867% (3)
- PowerINSPECT (Guia Do Usuário)Документ348 страницPowerINSPECT (Guia Do Usuário)Marcus Menezes100% (2)
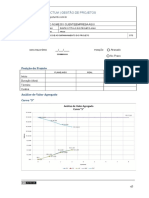
- Modelo de Relatorio de Acompanhamento Do ProjetoДокумент5 страницModelo de Relatorio de Acompanhamento Do ProjetoDanise ThomásОценок пока нет
- BISON Analisador SintáticoДокумент40 страницBISON Analisador SintáticoThiago Fernandes100% (2)
- TCC MetodologiaДокумент3 страницыTCC MetodologiaThiago Cardozo de AbreuОценок пока нет
- Desativando Protexis Licensing ServiceДокумент2 страницыDesativando Protexis Licensing ServiceAdriano DuarteОценок пока нет
- Manual de Integracao Com o WebService Tributario - v1.13 PDFДокумент10 страницManual de Integracao Com o WebService Tributario - v1.13 PDFmdrJuniorОценок пока нет
- DTMFДокумент51 страницаDTMFmarceloОценок пока нет
- Academia MMДокумент214 страницAcademia MMRoberto C. S. Pedroga100% (2)
- Tabelas SX2Документ202 страницыTabelas SX2Geison CriОценок пока нет
- Eletrônica Automotiva - 5 (Componentes Eletrônicos Básicos - Ativos)Документ5 страницEletrônica Automotiva - 5 (Componentes Eletrônicos Básicos - Ativos)JorgeRomeroLópezОценок пока нет
- Alterar Idioma Do Windows 7 PRДокумент82 страницыAlterar Idioma Do Windows 7 PRJaime_Matos_DОценок пока нет
- Análise Multivariada - (Aula) .PPT (Modo de Compatibilidade)Документ27 страницAnálise Multivariada - (Aula) .PPT (Modo de Compatibilidade)Nilton AlvesОценок пока нет
- 128 REV 00 ControlLogix Programação Avançada - Guia de InstruçõesДокумент511 страниц128 REV 00 ControlLogix Programação Avançada - Guia de InstruçõesRoberto VitorОценок пока нет
- Equipamentos de Interconexão de RedeДокумент1 страницаEquipamentos de Interconexão de RedeClebersonRian100% (1)
- Arranjos SimplesДокумент2 страницыArranjos SimplesSelson PereiraОценок пока нет
- CodigosДокумент19 страницCodigosMatheus BuenoОценок пока нет
- Caixa - Tesouraria - Fechamento Caixa TasyДокумент4 страницыCaixa - Tesouraria - Fechamento Caixa TasyWagner ChrispimОценок пока нет
- Como Fazer Um Mapa MentalДокумент7 страницComo Fazer Um Mapa MentalBrunoОценок пока нет
- Arte Na Era DigitalДокумент219 страницArte Na Era DigitalvenisemeloОценок пока нет
- Extranet VDO TacografoДокумент2 страницыExtranet VDO TacografoEdevaldo Santana0% (1)
- Como Criar Um Blog de Nicho e Ganhar Dinheiro Na Internet (Módulo I)Документ148 страницComo Criar Um Blog de Nicho e Ganhar Dinheiro Na Internet (Módulo I)Sandro Da Silva SantosОценок пока нет
- Datasheet Gpon Onu 110 GДокумент2 страницыDatasheet Gpon Onu 110 GGildson Costa FagundesОценок пока нет
- cck700 PDFДокумент8 страницcck700 PDFthiagodorockkОценок пока нет
- Exposições OraisДокумент19 страницExposições OraisEugénia PintoОценок пока нет
- Lista 1 - Inequações e Funções - Domínio, Tipos de FunçõesДокумент2 страницыLista 1 - Inequações e Funções - Domínio, Tipos de FunçõesMatheus SantosОценок пока нет
- 25 Exercícios de Funcao Composta e InversaДокумент4 страницы25 Exercícios de Funcao Composta e Inversaisaac rodriguesОценок пока нет
- Análise Da Compatibilização de Projetos de Um Edifício Multifamiliar Utilizando A Metodologia BimДокумент85 страницAnálise Da Compatibilização de Projetos de Um Edifício Multifamiliar Utilizando A Metodologia BimFernando Geraldo Silva SilvaОценок пока нет
- 04 - Tia Portal - Hands On - SCL v11 - v1Документ23 страницы04 - Tia Portal - Hands On - SCL v11 - v1Josemar Correia100% (1)
- Manual de Instruções Do Pencil 2DДокумент9 страницManual de Instruções Do Pencil 2DalcmataОценок пока нет