Вам также может понравиться
- Ex 2 SolutionДокумент13 страницEx 2 SolutionMian AlmasОценок пока нет
- Glosario InglésДокумент10 страницGlosario InglésLorena MonroyОценок пока нет
- Lab 06Документ7 страницLab 06Andy MeyerОценок пока нет
- Lab 7 System Response Analog and Digital Filters 4Документ11 страницLab 7 System Response Analog and Digital Filters 4TrầnThanhTấnОценок пока нет
- NG - Argument Reduction For Huge Arguments: Good To The Last BitДокумент8 страницNG - Argument Reduction For Huge Arguments: Good To The Last BitDerek O'ConnorОценок пока нет
- Time and Frequency Response Analysis of Fuzzy Controller: IEEE Member Asso. Prof., IEEE MemberДокумент10 страницTime and Frequency Response Analysis of Fuzzy Controller: IEEE Member Asso. Prof., IEEE MemberPero01Оценок пока нет
- Lab 1e Fixed-Point Output Fall 2010 1e.1Документ8 страницLab 1e Fixed-Point Output Fall 2010 1e.1iky77Оценок пока нет
- FPGA Implementation of IEEE-754 Karatsuba MultiplierДокумент4 страницыFPGA Implementation of IEEE-754 Karatsuba MultiplierSatyaKesavОценок пока нет
- External Interface (S) Application Guide: Energyplus™ Version 8.8.0 DocumentationДокумент31 страницаExternal Interface (S) Application Guide: Energyplus™ Version 8.8.0 DocumentationffdfddОценок пока нет
- Instrumentation (Chapter 2)Документ7 страницInstrumentation (Chapter 2)Yab TadОценок пока нет
- AssignmentДокумент4 страницыAssignmentAnonymous ne1h1Vk140Оценок пока нет
- External Interface (S) Application Guide: Energyplus™ Version 9.3.0 DocumentationДокумент31 страницаExternal Interface (S) Application Guide: Energyplus™ Version 9.3.0 DocumentationYin LiОценок пока нет
- CP AssignmentДокумент31 страницаCP AssignmentAshraf AliОценок пока нет
- Analog SimulationДокумент9 страницAnalog SimulationMotaz Ahmad AmeenОценок пока нет
- Digital Filter Design Using MatlabДокумент41 страницаDigital Filter Design Using MatlabKirti Susan VargheseОценок пока нет
- Numerical Methods in PhysicsДокумент10 страницNumerical Methods in PhysicsAnonymous Vbv8SHv0bОценок пока нет
- ASM Design Example Bin MultДокумент11 страницASM Design Example Bin MultMudumby KulashekarОценок пока нет
- Signal Processing in Digital ControlДокумент40 страницSignal Processing in Digital ControlSaiRoopa GaliveetiОценок пока нет
- Computer Science Textbook Solutions - 25Документ30 страницComputer Science Textbook Solutions - 25acc-expertОценок пока нет
- Lab # 06 PDFДокумент12 страницLab # 06 PDFIrfan HaiderОценок пока нет
- Chapter Three Functions: University of Misan College of Engineering Dept. of ElectricityДокумент8 страницChapter Three Functions: University of Misan College of Engineering Dept. of ElectricityHuthaifah SalmanОценок пока нет
- Plagiarism Checker X Originality: Similarity Found: 58%Документ9 страницPlagiarism Checker X Originality: Similarity Found: 58%Junaid AnwarОценок пока нет
- Assignment: 1: X X X eДокумент6 страницAssignment: 1: X X X ejvNKJVDKJVSJОценок пока нет
- Informe Proyecto Final DinamicosДокумент5 страницInforme Proyecto Final DinamicosCamilo AgredoОценок пока нет
- Approaches To Low-Power Implementations of DSP SystemsДокумент22 страницыApproaches To Low-Power Implementations of DSP SystemsHarish KumarОценок пока нет
- Wei Sun, Liya ZHOUДокумент5 страницWei Sun, Liya ZHOUM Chandan ShankarОценок пока нет
- Ballast Design Software - Ballast Soft PC Im 02Документ6 страницBallast Design Software - Ballast Soft PC Im 02controllineОценок пока нет
- Detect Abrupt System Changes Using Identification TechniquesДокумент6 страницDetect Abrupt System Changes Using Identification TechniquesPierpaolo VergatiОценок пока нет
- Solutions Manual For Digital Communications in PracticeДокумент48 страницSolutions Manual For Digital Communications in PracticecasdeaОценок пока нет
- Floating-Point Bitwidth Analysis Via Automatic DifferentiationДокумент8 страницFloating-Point Bitwidth Analysis Via Automatic Differentiationarthur-pham-5188Оценок пока нет
- Ue21cs352a 20230830120810Документ30 страницUe21cs352a 20230830120810Sonupatel SonupatelОценок пока нет
- Ass1 PDFДокумент2 страницыAss1 PDFOsho GeraОценок пока нет
- ET 304A Laboratory Tutorial-Circuitmaker For Transient and Frequency AnalysisДокумент7 страницET 304A Laboratory Tutorial-Circuitmaker For Transient and Frequency AnalysisZhong XiangОценок пока нет
- Piecewise Linear Interpolation On PIC12/14/16 Series MicrocontrollersДокумент8 страницPiecewise Linear Interpolation On PIC12/14/16 Series Microcontrollersjay lowkeyОценок пока нет
- Dynamic Systems Final ProjectДокумент4 страницыDynamic Systems Final ProjectsergioОценок пока нет
- Matlab, Simulink - Control Systems Simulation Using Matlab and SimulinkДокумент10 страницMatlab, Simulink - Control Systems Simulation Using Matlab and SimulinkTarkes DoraОценок пока нет
- Logica Difussa Pic CДокумент8 страницLogica Difussa Pic CAzariel HaiayelОценок пока нет
- Artigo Publicado TerezaДокумент6 страницArtigo Publicado TerezaConstantin DorinelОценок пока нет
- UNIT-8 Forms of Parallelism: 8.1 Simple Parallel Computation: Example 1: Numerical Integration Over Two VariablesДокумент12 страницUNIT-8 Forms of Parallelism: 8.1 Simple Parallel Computation: Example 1: Numerical Integration Over Two VariablesArshad ShaikОценок пока нет
- Design of UpsamplerДокумент7 страницDesign of Upsamplerprasu440Оценок пока нет
- Digital Control System PDFДокумент0 страницDigital Control System PDFwww.bhawesh.com.np100% (1)
- Matlab Basics Tutorial: Electrical and Electronic Engineering & Electrical and Communication Engineering StudentsДокумент23 страницыMatlab Basics Tutorial: Electrical and Electronic Engineering & Electrical and Communication Engineering StudentssushantnirwanОценок пока нет
- Analog Computer ManualДокумент51 страницаAnalog Computer ManualYlver Prado YesquenОценок пока нет
- Test Bench For Exponential FunctionДокумент4 страницыTest Bench For Exponential Functionfarzian1Оценок пока нет
- Data Logger Geokon Linear CoefficientsДокумент6 страницData Logger Geokon Linear Coefficientscchung147554Оценок пока нет
- MCH3008 Lab ProjectДокумент4 страницыMCH3008 Lab ProjectEJAZ AHMADОценок пока нет
- ENG3104 Assignment3Документ8 страницENG3104 Assignment3Nayim MohammadОценок пока нет
- 100 CSE 2 MarksДокумент10 страниц100 CSE 2 MarksdhanarajОценок пока нет
- Abstract:: How To Govern PrinciplesДокумент44 страницыAbstract:: How To Govern PrinciplesssfofoОценок пока нет
- Modeling of Integrated Monitoring On Power Transformer Using LabviewДокумент10 страницModeling of Integrated Monitoring On Power Transformer Using LabviewNituОценок пока нет
- Weekly PP PDFДокумент11 страницWeekly PP PDFDanielHaileОценок пока нет
- Digital Control Systems: Lecture NotesДокумент61 страницаDigital Control Systems: Lecture NotesHari Pavan0391Оценок пока нет
- Integer Optimization and its Computation in Emergency ManagementОт EverandInteger Optimization and its Computation in Emergency ManagementОценок пока нет
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsОт EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsОценок пока нет
- Nonlinear Control Feedback Linearization Sliding Mode ControlОт EverandNonlinear Control Feedback Linearization Sliding Mode ControlОценок пока нет
- Introduction to the simulation of power plants for EBSILON®Professional Version 15От EverandIntroduction to the simulation of power plants for EBSILON®Professional Version 15Оценок пока нет
- Practical Numerical C Programming: Finance, Engineering, and Physics ApplicationsОт EverandPractical Numerical C Programming: Finance, Engineering, and Physics ApplicationsОценок пока нет
- Precision Digital Sine-Wave Generation With The TMS32010: Application Report: Spra007Документ23 страницыPrecision Digital Sine-Wave Generation With The TMS32010: Application Report: Spra007naveen reddyОценок пока нет
- Generation of A Sine Wave Using A TMS320C54x PDFДокумент15 страницGeneration of A Sine Wave Using A TMS320C54x PDFbaba_mircea894100% (1)
- LCD Screen-8051 PDFДокумент23 страницыLCD Screen-8051 PDFnaveen reddyОценок пока нет
- Snoa665c PDFДокумент18 страницSnoa665c PDFnaveen reddyОценок пока нет
- Creating A Two Channel Sine Wave Generator Using The TMS320F240 EVMДокумент34 страницыCreating A Two Channel Sine Wave Generator Using The TMS320F240 EVMnaveen reddyОценок пока нет
- Appendix A Phase Lock Loops: x (t) = A cos (ω t + θ (t) )Документ36 страницAppendix A Phase Lock Loops: x (t) = A cos (ω t + θ (t) )naveen reddyОценок пока нет
- Implementation of An FSK Modem Using The TMS320C17: Application Report: Spra080Документ62 страницыImplementation of An FSK Modem Using The TMS320C17: Application Report: Spra080naveen reddyОценок пока нет
- Feedback Control SystemДокумент40 страницFeedback Control SystemMuhammad SaeedОценок пока нет
- Assignment Operators: Op Era Tor Meaning / % + - &Документ1 страницаAssignment Operators: Op Era Tor Meaning / % + - &naveen reddyОценок пока нет
- Designing Stable Control Loops - 2001Документ31 страницаDesigning Stable Control Loops - 2001jasjas79Оценок пока нет
- Magnetic Design FormulaДокумент30 страницMagnetic Design Formulanaveen reddyОценок пока нет
- E19Документ7 страницE19crimelife6Оценок пока нет
- TMS320 MPPTДокумент1 страницаTMS320 MPPTnaveen reddyОценок пока нет
- Arthashastra of Chanakya - EnglishДокумент614 страницArthashastra of Chanakya - EnglishHari Chandana K83% (6)
- One Piece Design W/ Screw Clamp TerminationДокумент1 страницаOne Piece Design W/ Screw Clamp Terminationnaveen reddyОценок пока нет
- Delta PidДокумент6 страницDelta Pidnaveen reddyОценок пока нет
- L-38 (DP) (Pe) ( (Ee) Nptel)Документ13 страницL-38 (DP) (Pe) ( (Ee) Nptel)Abhi NáyОценок пока нет
- Pasquale Arpaia, Pasquale Cimmino, Fabrizio Clemente, Carmine RomanucciДокумент5 страницPasquale Arpaia, Pasquale Cimmino, Fabrizio Clemente, Carmine Romanuccinaveen reddyОценок пока нет
- Embedded Systems Interview QuestionsДокумент1 страницаEmbedded Systems Interview Questionsnaveen reddyОценок пока нет
- One Piece Design W/ Screw Clamp TerminationДокумент1 страницаOne Piece Design W/ Screw Clamp Terminationnaveen reddyОценок пока нет
- 4167 AssemblerДокумент2 страницы4167 Assemblernaveen reddyОценок пока нет
- BomДокумент1 страницаBomnaveen reddyОценок пока нет
- Assignment OperatorsДокумент1 страницаAssignment Operatorsnaveen reddyОценок пока нет
- Assignment OperatorsДокумент1 страницаAssignment Operatorsnaveen reddyОценок пока нет
- Pri OscДокумент1 страницаPri Oscnaveen reddyОценок пока нет
- Timer 2Документ1 страницаTimer 2naveen reddyОценок пока нет
- Life Extension Through Charge Equalization of Lead-Acid BatteriesДокумент8 страницLife Extension Through Charge Equalization of Lead-Acid Batteriesnaveen reddyОценок пока нет
- 137Документ6 страниц137naveen reddyОценок пока нет
- Single-Switch Frequency-Controlled Electronic Dimming Ballast With Unity Power FactorДокумент6 страницSingle-Switch Frequency-Controlled Electronic Dimming Ballast With Unity Power Factornaveen reddyОценок пока нет
- UNIT 2&3 Imp MeowДокумент10 страницUNIT 2&3 Imp MeowNani tomОценок пока нет
- Noblex 24 LC827H PDFДокумент41 страницаNoblex 24 LC827H PDFca_oti100% (1)
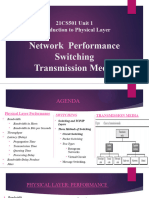
- Switching & Transmission MediaДокумент43 страницыSwitching & Transmission MediaVicky VigneshОценок пока нет
- C++Guide Part3Документ3 страницыC++Guide Part3Thiet pham vanОценок пока нет
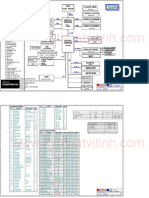
- Asus Z84FMДокумент66 страницAsus Z84FMNicu LiviuОценок пока нет
- MATLAB-Based Coconut Maturity Classifier Using Audio and Image ProcessingДокумент7 страницMATLAB-Based Coconut Maturity Classifier Using Audio and Image ProcessingLarsen Perez100% (1)
- BAS Digital Direct Control: FunctionДокумент1 страницаBAS Digital Direct Control: FunctionHai Le0% (1)
- کاتالوگ انگلیسی سروو تتاДокумент174 страницыکاتالوگ انگلیسی سروو تتاUsama ZaheerОценок пока нет
- ID-2150P2-Igor-PoE-Standard-Network-Node-Mid-Datasheet-2022-Rev. 1Документ8 страницID-2150P2-Igor-PoE-Standard-Network-Node-Mid-Datasheet-2022-Rev. 1Ahmed HabibОценок пока нет
- ThreadДокумент9 страницThreadCool SrikОценок пока нет
- EE 215 Lab 3 HandoutДокумент5 страницEE 215 Lab 3 HandoutArnav MathurОценок пока нет
- Block Diagram: MODEL DS13330 Chassis No. 13330-01 Schematic Diagrams WaveformsДокумент1 страницаBlock Diagram: MODEL DS13330 Chassis No. 13330-01 Schematic Diagrams WaveformsAlfredodos Hernandez JuarezОценок пока нет
- SOP Manual BungardДокумент36 страницSOP Manual BungardRandom AspectОценок пока нет
- STEC SE Lite DS-EnДокумент2 страницыSTEC SE Lite DS-Ensimpohhong11Оценок пока нет
- Build Control ToolДокумент25 страницBuild Control ToolsangaviОценок пока нет
- R9DS IntroductionДокумент4 страницыR9DS IntroductionMauricio Hernandez SolanoОценок пока нет
- CrowdStrike IP DataSheetДокумент19 страницCrowdStrike IP DataSheetPankaj SinghОценок пока нет
- Understanding Operating Systems Sixth EditionДокумент47 страницUnderstanding Operating Systems Sixth EditionBSIT3_IT116Оценок пока нет
- Cinema 3D Sound Blu-Ray Home Cinema System: Service ManualДокумент147 страницCinema 3D Sound Blu-Ray Home Cinema System: Service ManualbeetorОценок пока нет
- Operating System 2 Marks and 16 Marks - AnswersДокумент45 страницOperating System 2 Marks and 16 Marks - AnswersDiana Arun75% (4)
- Tutorials Point DAA PDFДокумент102 страницыTutorials Point DAA PDFsgdkj asfdjkbОценок пока нет
- HT Altea-715a 00Документ2 страницыHT Altea-715a 00Marco KuhОценок пока нет
- Nokia 6670 7610 PDFДокумент8 страницNokia 6670 7610 PDFSrinivasan NarayanaswamiОценок пока нет
- Oracle HTTP Server Mod - PLSQL Users Guide 10gR2 (b14337) PDFДокумент72 страницыOracle HTTP Server Mod - PLSQL Users Guide 10gR2 (b14337) PDFjescalante13Оценок пока нет
- Software Requirements SpecificationДокумент16 страницSoftware Requirements SpecificationPheesayor 'Phyzzle' AdewunmiОценок пока нет
- An 5380 Double Balanced Diode Mixer Using The HSMS 2822Документ3 страницыAn 5380 Double Balanced Diode Mixer Using The HSMS 2822OreolОценок пока нет
- Tourism SrsДокумент22 страницыTourism SrsAshhad Faqeem47% (36)
- TR 3647Документ4 страницыTR 3647batungОценок пока нет
- Quiz SystemДокумент28 страницQuiz Systemmervinjones33% (6)
- Ringing Slic Module MX801 V5 1 enДокумент6 страницRinging Slic Module MX801 V5 1 enmccm77Оценок пока нет