Вам также может понравиться
- EMSv 1Документ1 страницаEMSv 1Nick LaveryОценок пока нет
- Alone, FCG-Driven High Power Microwave SystemДокумент5 страницAlone, FCG-Driven High Power Microwave SystempauljansonОценок пока нет
- The Thermal Conductance of Bolted Joints PDFДокумент207 страницThe Thermal Conductance of Bolted Joints PDFGabrielHabibОценок пока нет
- Baliga Figure of MeritДокумент3 страницыBaliga Figure of MeritKyle BotheОценок пока нет
- A 3-Db Quadrature Coupler Suitable For PCB Circuit DesignДокумент5 страницA 3-Db Quadrature Coupler Suitable For PCB Circuit Designagmnm1962Оценок пока нет
- Boukamp 2020 J. Phys. Energy 2 042001Документ25 страницBoukamp 2020 J. Phys. Energy 2 042001Jayveer JoshiОценок пока нет
- Modeling and Simulation of Insulated-Gate Field-Effect Transistors - Shichman1968 PDFДокумент5 страницModeling and Simulation of Insulated-Gate Field-Effect Transistors - Shichman1968 PDFWilliam ccorquiОценок пока нет
- Hydrocarbon-Air Fuel Cell Systems: Many EconomicallyДокумент8 страницHydrocarbon-Air Fuel Cell Systems: Many Economicallyms_petro83Оценок пока нет
- S210Документ86 страницS210Sadullah AvdiuОценок пока нет
- Analysis of Dielectric ResponseДокумент221 страницаAnalysis of Dielectric ResponsearunjothiОценок пока нет
- 04 0800 HVDC Plenary RashwanДокумент24 страницы04 0800 HVDC Plenary RashwanDante FilhoОценок пока нет
- International Journal of Engineering Research and DevelopmentДокумент8 страницInternational Journal of Engineering Research and DevelopmentIJERDОценок пока нет
- Multi LVL DC DC BoostДокумент9 страницMulti LVL DC DC BoostDurga PrathibhaОценок пока нет
- Lesson 3 Atomic StructureДокумент7 страницLesson 3 Atomic Structuremichael-education KОценок пока нет
- The Even - and Odd-Mode Capacitance Parameters For Coupled Lines in Suspended SubstrateДокумент8 страницThe Even - and Odd-Mode Capacitance Parameters For Coupled Lines in Suspended SubstrateSam SomarithОценок пока нет
- The New Law of Electrical Power FormationДокумент37 страницThe New Law of Electrical Power Formationdragon314159Оценок пока нет
- Design Solutions For DC Bias of Multilayer Ceramic Capactiors (MLCCS)Документ3 страницыDesign Solutions For DC Bias of Multilayer Ceramic Capactiors (MLCCS)Nikola DulgiarovОценок пока нет
- High Temperature Hybrid Radial Magnetic Bearing Systems Capable ofДокумент5 страницHigh Temperature Hybrid Radial Magnetic Bearing Systems Capable ofelectronenergyОценок пока нет
- Orazem EIS Spring 2008Документ306 страницOrazem EIS Spring 2008Bangkit Rachmat HilcaОценок пока нет
- AssignmentДокумент5 страницAssignmentAbdul HannanОценок пока нет
- Generalized Predictive Control Part II. Extensions and InterpretationsДокумент12 страницGeneralized Predictive Control Part II. Extensions and Interpretationsfiregold2100% (1)
- Toshiba Smart Grids To Realize Advanced Energy ManagementДокумент4 страницыToshiba Smart Grids To Realize Advanced Energy ManagementAsian Development BankОценок пока нет
- Basic Operation and Constructional Features of A DC Machine AreДокумент28 страницBasic Operation and Constructional Features of A DC Machine AreBrijesh PrasadОценок пока нет
- E01 33kV and 11 KV Lightning Arresters (1) - 2010Документ12 страницE01 33kV and 11 KV Lightning Arresters (1) - 2010Ashwin RaparthiОценок пока нет
- Comparison of Different FE Calculation Methods For The Electromagnetic Torque of PM MachinesДокумент8 страницComparison of Different FE Calculation Methods For The Electromagnetic Torque of PM Machinesmlkz_01Оценок пока нет
- Eddy Current BrakesДокумент18 страницEddy Current BrakesAjoy RsОценок пока нет
- 6 - Best of “ Reversible Direct Current Sub-Station”Документ11 страниц6 - Best of “ Reversible Direct Current Sub-Station”Fernando GuedesОценок пока нет
- Solution Manual PDFДокумент162 страницыSolution Manual PDFBerihu GirmayОценок пока нет
- ReadMe12 PDFДокумент6 страницReadMe12 PDFLuis RodriguezОценок пока нет
- DVM 1500 MДокумент9 страницDVM 1500 MHanif Rathore PrinceОценок пока нет
- Piezoelectric PDFДокумент10 страницPiezoelectric PDFNicolaus AnelkaОценок пока нет
- Simulation of A Doubly-Fed Induction Generator With Hydro TurbineДокумент6 страницSimulation of A Doubly-Fed Induction Generator With Hydro TurbineHazrul_Mohamed_BasriОценок пока нет
- Plasma Simulation by Artificial Dielectrics and Parallel-Plate Media-Xy9Документ14 страницPlasma Simulation by Artificial Dielectrics and Parallel-Plate Media-Xy9archie222222Оценок пока нет
- DC Characteristics of A MOS Transistor (MOSFET) : Solved With COMSOL Multiphysics 4.4Документ18 страницDC Characteristics of A MOS Transistor (MOSFET) : Solved With COMSOL Multiphysics 4.4shree_rs81Оценок пока нет
- Tap Changing Transformers Maintain Voltage LevelsДокумент27 страницTap Changing Transformers Maintain Voltage LevelsNadeesha BandaraОценок пока нет
- ELX304 Ref ExamДокумент13 страницELX304 Ref ExamNadeesha Bandara0% (1)
- In Electrical Electronic MeasurementДокумент29 страницIn Electrical Electronic Measurementsiddhartha bharadwajОценок пока нет
- Switching Power Supply Design: Key Elements of a Discontinuous Mode Flyback ConverterДокумент13 страницSwitching Power Supply Design: Key Elements of a Discontinuous Mode Flyback ConverterPopescu LucianОценок пока нет
- Seminar Report On Plasma AntennaДокумент17 страницSeminar Report On Plasma Antennamohanmanis50% (2)
- Mwoc Final Lab Manual 28-08-2010Документ77 страницMwoc Final Lab Manual 28-08-2010downloadscribdpdfОценок пока нет
- Motherson: (Interview Questions - Technical)Документ32 страницыMotherson: (Interview Questions - Technical)Vikas PanchalОценок пока нет
- 5-3-1 CST EucДокумент21 страница5-3-1 CST EucAlok KumarОценок пока нет
- EE100B Lab 3 ReportДокумент5 страницEE100B Lab 3 ReportTina Nguyen0% (2)
- Super-High Frequency Models and Behaviour PDFДокумент23 страницыSuper-High Frequency Models and Behaviour PDFalokinxxОценок пока нет
- Diploma ELECTRICAl 6th Sem SylДокумент21 страницаDiploma ELECTRICAl 6th Sem SylAadil Ashraf KhanОценок пока нет
- 150kV/300A/1μs Blumlein Pulser Design and ConstructionДокумент5 страниц150kV/300A/1μs Blumlein Pulser Design and Constructionlake_appliance6693Оценок пока нет
- Realization of a Simple AND-OR Circuit and Propagation Delay StudyДокумент6 страницRealization of a Simple AND-OR Circuit and Propagation Delay StudyJoanne Lai100% (1)
- Design and Implementation of Attitude Control For 3-Axes Magnetic Coil Stabilization of A SpacecraftДокумент146 страницDesign and Implementation of Attitude Control For 3-Axes Magnetic Coil Stabilization of A SpacecraftManoj SaralayaОценок пока нет
- Topic 1 Plant Planning and Power DemandДокумент34 страницыTopic 1 Plant Planning and Power Demandblaze emberОценок пока нет
- Basic Electrical Engineering LabДокумент1 страницаBasic Electrical Engineering LabchaitanyaОценок пока нет
- Tutorial XSpectraДокумент84 страницыTutorial XSpectranapolesdОценок пока нет
- 07 Circuits & Systems. Analog & Digital Signal ProcessingДокумент1 041 страница07 Circuits & Systems. Analog & Digital Signal ProcessingAngel CelestialОценок пока нет
- Modelling and Calculation of The Current Density Distribution Evolution at Vertical Gas-Evolving ElectrodesДокумент17 страницModelling and Calculation of The Current Density Distribution Evolution at Vertical Gas-Evolving ElectrodesmetawfikОценок пока нет
- 1: Choose The Best Answer of The Following (20 Marks) : P P S SДокумент4 страницы1: Choose The Best Answer of The Following (20 Marks) : P P S Sshubha christopher100% (1)
- Electrical Overstress (EOS): Devices, Circuits and SystemsОт EverandElectrical Overstress (EOS): Devices, Circuits and SystemsОценок пока нет
- Structure and Properties of Inorganic Solids: International Series of Monographs in Solid State PhysicsОт EverandStructure and Properties of Inorganic Solids: International Series of Monographs in Solid State PhysicsОценок пока нет
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionОт EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionОценок пока нет
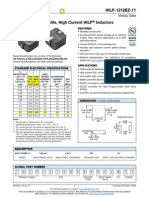
- IHLP-1212BZ-11: Vishay DaleДокумент5 страницIHLP-1212BZ-11: Vishay DaleAndres Rambal VecinoОценок пока нет
- Datasheet BCM2835 ARM PeripheralsДокумент205 страницDatasheet BCM2835 ARM PeripheralsrickyjamesОценок пока нет
- TCP PhytonДокумент1 страницаTCP PhytonAndres Rambal VecinoОценок пока нет
- Int 4 Bytes Char 1 Bytes Long in 4 Bytes Float 4 Bytes Lon Long Int 8 Bytes Double 8 BytesДокумент1 страницаInt 4 Bytes Char 1 Bytes Long in 4 Bytes Float 4 Bytes Lon Long Int 8 Bytes Double 8 BytesAndres Rambal VecinoОценок пока нет
- Diesel engine control module pinoutsДокумент5 страницDiesel engine control module pinoutsdane05100% (1)
- Multimedia & CGДокумент59 страницMultimedia & CGSharu KhemОценок пока нет
- 14Φ Series Metal Oxide Varistor (MOV) Data Sheet: FeaturesДокумент12 страниц14Φ Series Metal Oxide Varistor (MOV) Data Sheet: Featuresirensy vivasОценок пока нет
- Pages From Cir2 - Lect - 8 - Introduction - To - Poly - Phase PDFДокумент33 страницыPages From Cir2 - Lect - 8 - Introduction - To - Poly - Phase PDFHAMID SULIAMANОценок пока нет
- A Simplified Broadband Design Methodology For Linearized High-Efficiency Continuous Class-F Power AmplifiersДокумент12 страницA Simplified Broadband Design Methodology For Linearized High-Efficiency Continuous Class-F Power AmplifiersG H Raisoni College of Engineering NagpurОценок пока нет
- PV Solar Proposal: Harmon ElectricДокумент18 страницPV Solar Proposal: Harmon ElectricArka EnergyОценок пока нет
- English Book Spoken PDF Amrutha Spoken EnglishДокумент5 страницEnglish Book Spoken PDF Amrutha Spoken EnglishChandra Shekher64% (11)
- Resume - AJAY - 8+yearsДокумент5 страницResume - AJAY - 8+yearsRajesh jainОценок пока нет
- HEBT-5V - Manual Serviço (EN) (2016.11)Документ24 страницыHEBT-5V - Manual Serviço (EN) (2016.11)Thiago AzevedoОценок пока нет
- ProductData en De-01Документ1 страницаProductData en De-01publicdomainОценок пока нет
- Installation and Use Instructions 7 Day Electronic Timer (TE103)Документ2 страницыInstallation and Use Instructions 7 Day Electronic Timer (TE103)eeindustrialОценок пока нет
- Description Features: Ltc4100 Smart Battery Charger ControllerДокумент30 страницDescription Features: Ltc4100 Smart Battery Charger ControllerAlexander VargasОценок пока нет
- Ac Servo MotorДокумент14 страницAc Servo MotorJeyanthОценок пока нет
- Definition of operating modes and transmission fault codesДокумент22 страницыDefinition of operating modes and transmission fault codesAhmetОценок пока нет
- Simulation and Study of A DC-DC BOOST Converter Controlled by Arduino - LAALMI MiloudДокумент66 страницSimulation and Study of A DC-DC BOOST Converter Controlled by Arduino - LAALMI MiloudHani MatiОценок пока нет
- Simoreg DC Master: Application SIMOREG For DC-Motor Generator Set ControlДокумент24 страницыSimoreg DC Master: Application SIMOREG For DC-Motor Generator Set Controlanas raddawiОценок пока нет
- Cpnversor DC - DC MAX17113Документ30 страницCpnversor DC - DC MAX17113Antonio ChavezОценок пока нет
- Perkin Elmer Manual Operacion Series 200 VacuumDegasser PDFДокумент43 страницыPerkin Elmer Manual Operacion Series 200 VacuumDegasser PDFRuben Martinez Reyna100% (3)
- AzДокумент106 страницAzapi-3812322100% (2)
- Mini-Spectrometer Kacc9003eДокумент34 страницыMini-Spectrometer Kacc9003eTalhaОценок пока нет
- (IJCST-V5I6P3) :ms. Guddeti Divya Rani, A.RaviДокумент8 страниц(IJCST-V5I6P3) :ms. Guddeti Divya Rani, A.RaviEighthSenseGroupОценок пока нет
- Airpax Series 5024 Temperature SensorsДокумент2 страницыAirpax Series 5024 Temperature SensorsakaОценок пока нет
- Characteristics of Silicon and Germanium DiodesДокумент2 страницыCharacteristics of Silicon and Germanium DiodesKanageshwari Rathakrishnan100% (4)
- What Is The Difference Between Active Filter and Passive Filter ApplicationsДокумент3 страницыWhat Is The Difference Between Active Filter and Passive Filter ApplicationsNaRi Plc100% (1)
- Wind Turbines VAWTДокумент7 страницWind Turbines VAWTtarx441Оценок пока нет
- Human Auditory System Response To Modulated Electromagnetic EnergyДокумент4 страницыHuman Auditory System Response To Modulated Electromagnetic EnergyChris HardingОценок пока нет
- Esat 2 PQДокумент7 страницEsat 2 PQJaiko BendoОценок пока нет
- FXNQ-A 4PEN393318-1C Installation Manuals EnglishДокумент16 страницFXNQ-A 4PEN393318-1C Installation Manuals EnglishGeorge TziotisОценок пока нет
- WhirlpoolДокумент23 страницыWhirlpoolmrfarhatОценок пока нет
- Pic 01 INTRO PDFДокумент29 страницPic 01 INTRO PDFChintan Shah100% (1)